- Produit vectoriel et algèbre
-
Produit vectoriel
Le produit vectoriel est une opération vectorielle effectuée dans les espaces euclidiens orientés de dimension trois[1]. Le formalisme utilisé actuellement est apparu en 1881 dans un manuel d'analyse vectorielle écrit par Josiah Willard Gibbs pour ses étudiants en physique. Les travaux de Hermann Günther Grassmann et William Rowan Hamilton sont à l'origine du produit vectoriel défini par Gibbs[2],[3].
Sommaire
Histoire
Résumé[2]
En 1843, Hamilton inventa les quaternions qui permettent de définir le produit vectoriel. Indépendamment et à la même période (1844) Grassmann définissait dans Die lineale Ausdehnungslehre ein neuer Zweig der Mathematik un « produit géométrique » à partir de considérations géométriques ; mais il ne parvient pas à définir clairement un produit vectoriel. Puis Grassmann lit Hamilton et s'inspire de ses travaux pour publier en 1862 une deuxième version de son traité qui est nettement plus claire[4]. De même, Hamilton a lu les travaux de Grassmann et les a commentés et appréciés[5]. Plus tard Maxwell commença à utiliser la théorie des quaternions pour l'appliquer à la physique. Après Maxwell, Clifford modifia profondément le formalisme de ce qui devenait l'analyse vectorielle. Il s'intéressa aux travaux de Grassmann et Hamilton avec une nette préférence pour le premier[3]. En 1881, Gibbs publia Elements of Vector Analysis Arranged for the Use of Students of Physics s'inspirant des travaux déjà réalisés notamment ceux de Clifford et Maxwell. Si les physiciens se sont empressés d'utiliser le formalisme de Gibbs, celui-ci ne fut accepté en mathématiques que bien plus tard après plusieurs modifications.
Anecdote
Peter Guthrie Tait dans la préface de la troisième édition de son traité sur les quaternions qualifia le nouveau formalisme créé par Gibbs de « monstre hermaphrodite, composé des notations de Hamilton et Grassmann »[6].
Notation
Plusieurs notations sont en concurrence pour le produit vectoriel :
- En France, le produit vectoriel de u et de v est noté
 , où le V inversé se lit wedge ou vectoriel. Cette notation a été initiée par Cesare Burali-Forti et Roberto Marcolongo en 1908[7]. Son inconvénient est de rentrer en conflit avec la notation du produit extérieur.
, où le V inversé se lit wedge ou vectoriel. Cette notation a été initiée par Cesare Burali-Forti et Roberto Marcolongo en 1908[7]. Son inconvénient est de rentrer en conflit avec la notation du produit extérieur. - Dans la littérature anglophone (et au Canada francophone, ainsi qu'en Suisse), le produit vectoriel est noté
 . Cette notation est due à Josiah Willard Gibbs[6]. Son inconvénient est d'induire une confusion éventuelle avec le produit des réels et le produit cartésien. Mais ces produits ne portent pas sur des objets de même nature.
. Cette notation est due à Josiah Willard Gibbs[6]. Son inconvénient est d'induire une confusion éventuelle avec le produit des réels et le produit cartésien. Mais ces produits ne portent pas sur des objets de même nature. - Une troisième notation est l'utilisation des crochets de Lie :
![\left[\vec u\, , \vec v\right]](/pictures/frwiki/98/b64097a603bfcb40c1a761a107e2e945.png) [8].
[8].
Dans cet article, nous utiliserons la première convention.
Définition
Soit E un espace vectoriel euclidien orienté de dimension 3. Par le choix d'une base orthonormée, E peut être identifié avec l'espace R3, mais cette identification n'est pas obligatoire pour définir le produit vectoriel.
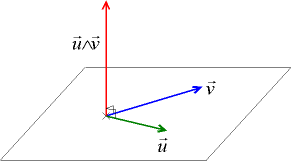
D'un point de vue géométrique, le produit vectoriel de deux vecteurs
 et
et  de E non colinéaires se définit comme l'unique vecteur
de E non colinéaires se définit comme l'unique vecteur  tel que :
tel que :- le vecteur est orthogonal aux deux vecteurs donnés ;
- la base
 est de sens direct ;
est de sens direct ;  .
.
Lorsque les vecteurs sont colinéaires, leur produit vectoriel est nul.
La notion d'orientation peut ici être comprise de manière élémentaire en utilisant la règle de la main droite : le pouce, l'index et le majeur écartés en un triède indiquent respectivement le sens de u, de v et de w. Cette définition, utilisée dans l'enseignement secondaire, n'est pas totalement satisfaisante.
Définition par le produit mixte
Une seconde définition utilise la théorie des déterminants et la notion de produit mixte comme point de départ. Le produit mixte de trois vecteurs u,v,w, noté [u,v,w], est le déterminant de ces trois vecteurs dans une base orthonormale directe quelconque. La formule de changement de base montre que ce déterminant est indépendant du choix de la base ; géométriquement il est égal au volume orienté du parallélépipède appuyé sur les vecteurs u,v,w. Le produit vectoriel de deux vecteurs u et v est l'unique vecteur
tel que, pour tout w, on a :![\left[\vec u, \vec v, \vec w\right] = (\vec u \wedge \vec v) \cdot \vec w\,](/pictures/frwiki/101/e3e94bd42adeb89556d444a062b694c4.png) .
.
L'existence et l'unicité d'un tel vecteur sont un cas particulier simple du théorème de représentation de Riesz. Le produit vectoriel s'interprète comme les variations du volume orienté d'un parallélépipède en fonction du troisième côté.
Avec une telle définition, il est possible de définir, dans un espace vectoriel orienté de dimension n + 1, le produit vectoriel de n vecteurs.
Équivalence des deux premières définitions- Prenons la seconde définition ; et appliquons l'identité ci-dessus à w= u et v respectivement. On obtient :
 et
et  .
.
- Donc, le vecteur
 est orthogonal à u et à v.
est orthogonal à u et à v. - De plus, si u,v,w forme une base directe, le produit mixte [u,v,w] est strictement positif. De fait, et w ne sont pas séparés par le plan vectoriel engendré par u et v. Autrement dit, u, v, u
 v forme une base directe.
v forme une base directe. - Si w est de plus unitaire (de norme 1), alors
 n'est autre que la norme euclidienne de u v. Cette dernière est donc le produit mixte [u,v,w] ; soit le volume orienté du parallélipipède appuyé sur u, v et w. Ce volume est le produit de la hauteur
n'est autre que la norme euclidienne de u v. Cette dernière est donc le produit mixte [u,v,w] ; soit le volume orienté du parallélipipède appuyé sur u, v et w. Ce volume est le produit de la hauteur  par l'aire de la base
par l'aire de la base  . De suite :
. De suite :
 .
.
Calcul en composantes
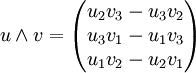
Le choix d'une base orthonormée directe donne une identification de E et de ℝ3. Notons les coordonnées u=(u1, u2, u3) et v=(v1, v2, v3). Leur produit vectoriel est donné par :
Cette identité pourrait être prise comme une troisième définition, à condition de prouver que le vecteur obtenu est indépendant de la base orthonormale directe choisie pour le calculer.
CalculsIntroduisons un vecteur w= (w1,w2,w3) et utilisons la définition par le produit mixte. Ce dernier est donné par :
En développant le déterminant par rapport à la troisième colonne :
![[u,v,w]=w_1\cdot\det\begin{pmatrix}
u_2 & v_2 \\
u_3 & v_3
\end{pmatrix}-w_2\cdot
\det\begin{pmatrix}
u_1 & v_1 \\
u_3 & v_3
\end{pmatrix}
+w_3\cdot\det\begin{pmatrix}
u_1 & v_1 \\
u_2 & v_2 \\
\end{pmatrix}](/pictures/frwiki/49/1a029d7e0b084f3ac4c6a40afa42399b.png) .
.
Ce qui donne les coefficients de
.Propriétés
Propriétés algébriques
Le produit vectoriel est un produit distributif, anticommutatif, non associatif :
- Distributivité sur l'addition :
 ,
,
- Compatibilité avec la multiplication par un scalaire :
 ,
,
- Anticommutativité :
- Non-associativité :
Ces propriétés découlent immédiatement de la définition du produit vectoriel par le produit mixte et des propriétés algébriques du déterminant.
Comme crochet de Lie, le produit vectoriel satisfait l'identité de Jacobi :
D'autre part, il satisfait aux identités de Lagrange (Égalités du Double Produit Vectoriel) :
En partant de l'identité algébrique :
 ,
,
on peut démontrer facilement l'égalité (aussi appelée identité de Lagrange) :
que l'on peut aussi écrire sous la forme :
ce qui équivaut à l'identité trigonométrique :
 ,
,
et qui n'est rien d'autre qu'une des façons d'écrire le théorème de Pythagore.
Invariance par isométries
Le produit vectoriel est invariant par l'action des isométries vectorielles directes. Plus exactement, pour tous vecteurs u et v de E et pour toute rotation f de E, on a :
![f\left[u\wedge v\right]=f(u)\wedge f(v)](/pictures/frwiki/56/8fa9e4ab3d8fa937113de46509c5995b.png) .
.
Cette identité peut être prouvée différemment suivant l'approche adoptée :
Définition géométrique : L'identité est immédiate avec la première définition, car f préserve l'orthogonalité, l'orientation et les longueurs.
Produit mixte : L'isomorphisme linéaire f laisse invariant le produit mixte de trois vecteurs. En effet, le produit mixte de f(u), f(v), f(w) peut être calculé dans l'image par f de la base orthonormée directe dans la quelle le produit mixte de u, v et w est calculé. De fait, l'identité précédente s'obtient immédiatement :
![(f(u)\wedge f(v))\cdot f(w)=[f(u),f(v),f(w)]=[u,v,w]=(u\wedge v)\cdot w\,](/pictures/frwiki/100/d2e011013b50c4482924d4acdb0d859e.png) .
.
Définitions alternatives
Comme produit de Lie
Toute isométrie directe de R3 est une rotation vectorielle. L'ensemble des isométries directes forme un groupe de Lie classique noté SO(3) (autrement dit, un sous-groupe fermé de GL3(R)). Son algèbre de Lie, notée so(3) est la sous-algèbre de Lie de gl3(R) définie comme l'espace tangent de SO(3) en l'identité. Un calcul direct montre qu'il est l'espace des matrices antisymétriques de taille 3. Cet espace est à fortiori stable par le crochet de Lie.
Toute matrice antisymétrique M de taille 3 s'écrit de manière unique :
 .
.
En identifiant M et le vecteur (a, b, c), on définit un isomorphisme linéaire entre so(3) et R3. Le crochet de Lie se transporte via cet isomorphisme, et R3 hérite d'une structure d'algèbre de Lie. Le crochet [u, v] de deux vecteurs est précisément le produit vectoriel de u et de v.
En effet, si u1=(a1, b1, c1), et u2=(a2, b2, c2), leur crochet se calcule en introduisant les matrices antisymétriques correspondantes M1 et M2 :
Le vecteur correspondant, à savoir [u, v], a donc pour coordonnées (bc'-b'c, ca'-c'a, ab'-a'b). Cette approche redéfinit donc le produit vectoriel.
Si on suit cette approche, il est possible de prouver directement l'invariance du produit vectoriel par isométries
- .
En tant qu'algèbres de Lie, so(3) a été identifié à R3. L'action (linéaire) de SO3(R) sur R3 s'identifie à l'action par conjugaison sur so(3). SO3(R) opère donc par automorphisme d'algèbres de Lie. Autrement dit, l'identité ci-dessus est vérifiée.
Comme produit de quaternions imaginaires
Il est possible de retrouver produit vectoriel et produit scalaire à partir du produit de deux quaternions purs. Pour rappel, le corps (non commutatif) des quaternions H est l'unique extension de R de dimension 4. Sa base canonique est (1,i, j, k) où le sous-espace engendré par i, j, k forme l'espace des quaternions purs, canoniquement identifié avec R3. Ces éléments vérifient :
 ;
; .
.
Si q1=a1i+b1j+c1k et q2 = a2i+b2j+c2k, le produit q1q2 se calcule immédiatement :
- q1q2 = − (a1a2 + b1b2 + c1c2) + (b1c2 − b2c1)i + (c1a2 − c2a1)j + (a1b2 − a2b1)k.
La partie réelle est au signe près le produit scalaire de q1 et de q2, la partie imaginaire est un quaternion pur qui correspond au produit vectoriel, après identification avec R3.
Cette coïncidence trouve ses explications dans le paramétrage du groupe SO(3) par les quaternions unitaires.
Éléments d'explicationL'application linéaire envoyant 1 sur 1, i sur -i, j sur -j et k sur -k est appelée la conjugaison. Le conjugué d'un quaternion q est noté
 . Un quaternion est un réel si et seulement s'il est égal à son conjugué. L'application
. Un quaternion est un réel si et seulement s'il est égal à son conjugué. L'application  définit un produit scalaire sur l'espace vectoriel H. Un quaternion est dit unitaire lorsqu'il est de norme 1. Dans ce cas, il suit de la définition même du produit scalaire qu'il est inversible et que son inverse est son conjugué. L'ensemble des quaternions unitaires, la sphère unité S3, forme un groupe (de Lie) compact et simplement connexe. Il agit sur l'espace des quaternions imaginaires par conjugaison. Pour tout quaternion unitaire u et pour tout quaternion imaginaire q :
définit un produit scalaire sur l'espace vectoriel H. Un quaternion est dit unitaire lorsqu'il est de norme 1. Dans ce cas, il suit de la définition même du produit scalaire qu'il est inversible et que son inverse est son conjugué. L'ensemble des quaternions unitaires, la sphère unité S3, forme un groupe (de Lie) compact et simplement connexe. Il agit sur l'espace des quaternions imaginaires par conjugaison. Pour tout quaternion unitaire u et pour tout quaternion imaginaire q : .
.
Cette action préserve la norme ; autrement dit, c'est une action par isométries. Elle définit donc un morphisme de groupes :
Ce morphisme est en réalité le revêtement universel du groupe SO(3). Il induit donc un isomorphisme entre les algèbres de Lie.
L'algèbre de Lie de S3 est justement l'espace des quaternions imaginaires munis du crochet de Lie obtenu comme la partie imaginaire du produit des quaternions. Cette algèbre de Lie est isomorphe à l'algèbre de Lie R3 (muni du produit vectoriel).
C'est la raison fondamentale pour laquelle la partie imaginaire de deux quaternions imaginaires s'identifie au produit vectoriel.
Article détaillé : quaternion.Il est de nouveau possible de justifier l'invariance par isométrie. Toute isométrie de l'espace des quaternions imaginaires s'écrit comme la conjugaison par un quaternion unitaire. Si q est un quaternion unitaire, et q1, q2 sont des quaternions imaginaires, il suffit de constater :
pour en déduire l'invariance par isométrie du produit vectoriel.
Par le produit tensoriel
{{À recycler voir produit tensoriel}}
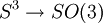
Soient deux vecteurs à trois composantes ui et vj. On peut définir le tenseur
qui, en notation tensorielle, s'écrit simplement :
Ce tenseur peut se décomposer en la demi-somme de deux tenseurs, l'un complètement symétrique :
qui a 6 composantes indépendantes, et l'autre complètement anti-symétrique :
qui a 3 composantes indépendantes. On peut alors « transformer » ce tenseur anti-symétrique en un vecteur à trois composantes en utilisant le symbole de Levi-Civita
 (ce dernier est un pseudo-tenseur dont la définition fait intervenir la métrique et l'orientation) :
(ce dernier est un pseudo-tenseur dont la définition fait intervenir la métrique et l'orientation) :(selon la convention de sommation d'Einstein, on somme sur i et sur j dans la formule ci-dessus). Le vecteur zk est le produit vectoriel de ui et vj.
On voit que si l'on échange les indices i et j, le signe change, ce qui illustre l'antisymétrie du produit vectoriel. En outre le résultat est un « pseudovecteur » puisqu'il est renversé si on change l'orientation de l'espace.
Applications
On définit l'opérateur rotationnel comme suit :
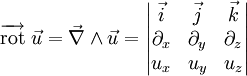 .
.- En mécanique du solide, c'est une opération très employée notamment dans la relation de Varignon qui lie les deux champs vectoriels d'un torseur. D'autre part, les équations de Maxwell sur l'électromagnétisme s'expriment à travers l'opérateur rotationnel, ainsi que les équations de la mécanique des fluides, notamment celles de Navier-Stokes.
Le moment d'une force est défini comme le produit vectoriel de cette force
 par le vecteur
par le vecteur  reliant son point d'application A au pivot P considéré :
reliant son point d'application A au pivot P considéré : .
.- C'est une notion primordiale en mécanique du solide.
Références
Ouvrages
- Marcel Berger, Géométrie [détail des éditions]
Notes et références
- ↑ Tous les espaces vectoriels euclidiens de dimension 3 sont deux à deux isométriques ; l'isométrie est bien définie à composition par une rotation près.
- ↑ a et b Michael J. Crowe, A history of vector analysis : The Evolution of the Idea of a Vectorial System, Dover publications, inc., 1994, 2e éd. (1re éd. 1985), (ISBN 0-486-67910-1)
- ↑ a et b Jean-Paul Collette, t. 2 : histoire des mathématiques, Vuibert, 1979, (ISBN 0-7767-0164-9), page 244
- ↑ Jean Dieudonné (dir.), Abrégé d'histoire des mathématiques 1700-1900 [détail des éditions] , 1986, page 107
- ↑ Michael J. Crowe, A history of vector analysis : The Evolution of the Idea of a Vectorial System, Dover publications, inc., 1994, 2e éd. (1re éd. 1985), (ISBN 0-486-67910-1), page 85
- ↑ a et b Florian Cajori, A History of Mathematical Notations [détail des éditions] , pages 134 et 136
- ↑ Florian Cajori, A History of Mathematical Notations [détail des éditions] , page 138
- ↑ Voir section Définition #Comme produit de Lie.
- ↑ En voici une démonstration
Voir aussi
Liens internes
 Portail des mathématiques
Portail des mathématiques
Catégories : Géométrie euclidienne | Aire | Opération - En France, le produit vectoriel de u et de v est noté
![[u,v,w]=\det\begin{pmatrix}
u_1 & v_1 & w_1\\
u_2 & v_2 & w_2\\
u_3 & v_3 & w_3
\end{pmatrix}](/pictures/frwiki/98/b35a324c858ffb60252bc5d7bc6f2b82.png)







![[M_1,M_2]=M_1M_2-M_2M_1=\begin{pmatrix}
0 & bc'-b'c & ac'-a'c\\
b'c -bc' & 0 & ab'-a'b\\
a'c-ac' & a'b-ab' & 0
\end{pmatrix}](/pictures/frwiki/98/b1db6f880d4dbe3f123b8517fda90082.png)
![\left[qq_1\overline{q}\right].\left[qq_2\overline{q}\right]=q(q_1q_2)\overline{q}](/pictures/frwiki/48/02defb56e8ee81404bea862ef03b3d18.png)
![[u\otimes v]_{ij}= u_i\cdot v_j](/pictures/frwiki/100/d261f6239a5c3ddfd2ba282e6dd92a49.png)
![[u\odot v]_{ij}=u_i\cdot v_j + u_j\cdot v_i](/pictures/frwiki/53/5ab63f5fe1cc8c4a8a4893182d42881e.png)
![[u\wedge v]_{ij}=u_i\cdot v_j - u_j\cdot v_i](/pictures/frwiki/52/4723e4a41e870debba5d01dd5b6ded82.png)













 Produit en couronne
Produit en couronne
 Somme connexe
Somme connexe

 Cup produit
Cup produit



Wikimedia Foundation. 2010.