- Mecanique du solide
-
Mécanique du solide
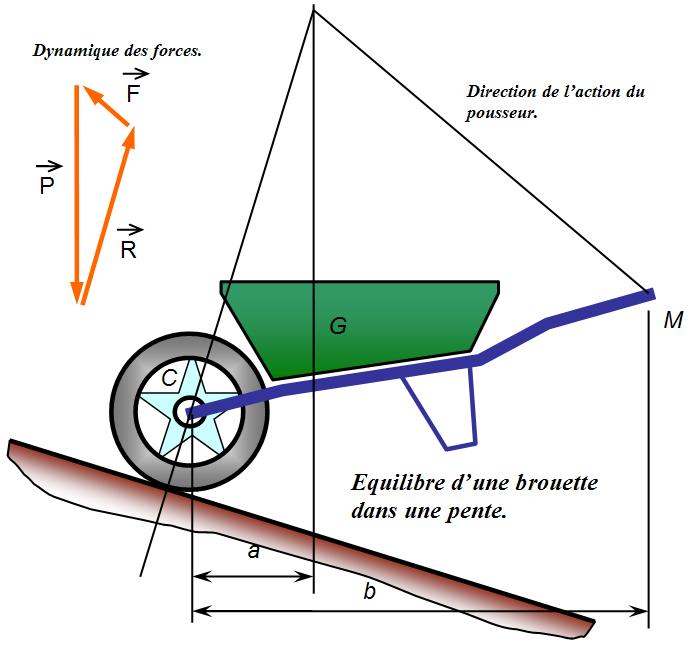
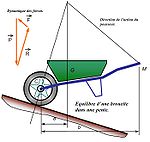 Illustration de la complexité du solide par rapport au point matériel
Illustration de la complexité du solide par rapport au point matériel
La mécanique du solide est la partie de la mécanique qui s'intéresse aux objets que l'on ne peut réduire en un point matériel. Cela permet notamment de décrire et modéliser les rotations de l'objet sur lui-même.
L'objet est lui-même composé de points matériels, que ce soit des points discrets — par exemple un assemblage de boules reliées par des baguettes de masse négligeable, chaque boule pouvant être modélisée par un point matériel — ou un ensemble continu de points. En général, on suppose le solide indéformable ; la déformation du solide relève de la mécanique des milieux continus.
La mécanique du solide est donc une branche de la mécanique traitant du comportement des mécanismes constitués de pièces rigides en général, et parfois déformables. L'objectif principal étant la détermination des performances d'un système en vue d'établir un dimensionnement adapté à l'usage envisagé, ou la validation de ces grandeurs.
Sommaire
Centres de gravité, d'inertie et de poussée
Dans les conditions habituelles, un solide est soumis à son poids. Chaque élément du solide (élément discret ou élément de matière isolé par l'esprit) a un poids propre, le poids de l'objet étant la résultante de tous ces poids. Pour simplifier l'étude, on considère que le solide est soumis à un poids unique, résultante des poids de ses composantes, et le centre de gravité, noté habituellement G, est le point d'application de cette force.
Article détaillé : Centre de gravité.L'analyse qui est faite pour le centre de gravité est en fait valable pour toutes les forces volumiques, et en particulier pour les forces d'inertie. On peut donc définir un centre d'inertie, qui est en fait confondu avec le centre de gravité lorsque le champ de gravité est homogène.
Article détaillé : Centre d'inertie.Contrairement à un point matériel, un solide peut être soumis à une pression, c'est-à-dire à une force qui s'exerce sur une surface. Chaque élément de surface subit une poussée propre. Pour simplifier l'étude, on considère que le solide est soumis à une force unique, résultante des poussées de ses composantes, et le centre de poussée est le point d'application de cette force.
De manière générale, le centre de poussé est distinct du centre de gravité. Lorsque la droite reliant le centre de poussée au centre de gravité n'est pas confondue avec la droite portant la résultante de la poussée, il en résulte un couple donc un basculement de l'objet.
Définition formelle
On appellera solide indéformable un ensemble de points tels que pris deux à deux, leur distance ne varie pas au cours du temps. Si les points sont discrets, on peut les noter Mi , et donc
 .
.
Des points au solide
La mécanique du point peut s'appliquer en chaque point du solide, ou bien, dans le cas d'un solide continu, pour chaque élément infinitésimal de volume dV autour d'un point (x, y, z).
Considèrons le barycentre G des points du solide. Dans le cas d'un ensemble de points matériels discrets Mi et masse mi , on a :
 ,
,
O étant l'origine du référentiel. Dans le cas d'un solide compact occupant un volume V, on peut définir en chaque point une densité ρ, et l'on a alors
En intégrant les lois de Newton sur le solide, on en déduit que le mouvement du barycentre lui-même peut être décrit par la mécanique du point ; on considére que les résultantes des forces du solide s'exercent sur le barycentre. Par exemple, si chaque élément de volume est soumis à un poids
 , alors on peut considérer que le barycentre est soumis au poids
, alors on peut considérer que le barycentre est soumis au poids  avec
avec .
.
On peut de même écrire le moment en chaque point du solide par rapport à une référence. En intégrant cette notion, on arrive à la notion de moment d'inertie et de moment cinétique.
On a donc deux types d'actions à décrire, qui font intervenir deux modèles : les translations, avec le centre d'inertie et les lois de Newton, et les rotations, avec les moments. Pour synthétiser cela, on peut utiliser un objet mathématique appelé torseur.
Modélisation par les torseurs
Article détaillé : Torseur.Relation de Varignon, notion de torseur
Soient
 un champ de vecteurs appelés moment,
un champ de vecteurs appelés moment,  un vecteur appelé résultante et A,B deux points du solide, on dit que ces éléments sont liés par la relation de Varignon si :
un vecteur appelé résultante et A,B deux points du solide, on dit que ces éléments sont liés par la relation de Varignon si :
Les vecteurs
et sont donc liés, on appelle torseur le couple de ces deux vecteurs et on le note :
Torseur cinématique
Soient
 le champ des vecteurs vitesse du solide S dans un référentiel R et O l'origine de l'espace. On a :
le champ des vecteurs vitesse du solide S dans un référentiel R et O l'origine de l'espace. On a :
une relation de Chasles nous donne alors
or, on montre qu'il existe
 tel que
tel que 
alors

on a alors une relation de Varignon, on peut donc définir un torseur appelé torseur cinématique :

où le champ des moments est le champ des vecteurs vitesse et où la résultante est le vecteur
appelé vecteur vitesse de rotation sa norme est la vitesse de rotation instantanée du solide.Lien externe
Conférence physique et mécanique du solide de Stéphane Roux à l'Université de tous les savoirs
 Portail de la physique
Portail de la physique Portail du génie mécanique
Portail du génie mécanique
Catégorie : Mécanique du solide



Wikimedia Foundation. 2010.