- Matrice Jacobienne
-
Matrice jacobienne
En analyse vectorielle, la matrice jacobienne est une matrice associée à une fonction vectorielle en un point donné. Son nom vient du mathématicien Charles Jacobi. Le déterminant de cette matrice, appelé jacobien, joue un rôle important dans la résolution de problèmes non-linéaires et en robotique.
Sommaire
Matrice jacobienne
La matrice jacobienne est la matrice des dérivées partielles du premier ordre d'une fonction vectorielle.
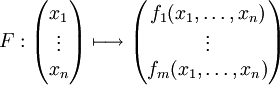
Soit F une fonction d'un ouvert de Rn à valeurs dans Rm. Une telle fonction est définie par ses m fonctions composantes à valeurs réelles :
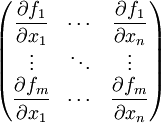
Les dérivées partielles de ces fonctions en un point M, si elles existent, peuvent être rangées dans une matrice à m lignes et n colonnes, appelée matrice jacobienne de F :
Cette matrice est notée :
Pour i = 1, ..., m, la ie ligne de cette matrice est la transposée du vecteur gradient au point M de la fonction yi. La matrice jacobienne est également la matrice de la différentielle de la fonction.
Exemple
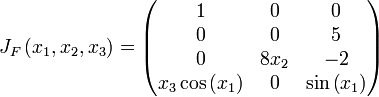
La matrice jacobienne de la fonction
 définie par :
définie par :est:
Propriétés
La matrice jacobienne d'une composée de fonctions est le produit des matrices jacobiennes de ces fonctions :

La matrice jacobienne de la réciproque d'une fonction est l'inverse de la matrice jacobienne de cette fonction.
Déterminant jacobien
Si m = n, alors la matrice jacobienne de F est une matrice carrée. Nous pouvons alors calculer son déterminant, appelé le déterminant jacobien, ou jacobien.
Une fonction continue et dérivable F est inversible au voisinage de M si et seulement si son jacobien en M est non nul (théorème d'inversion locale).
Le théorème de changement de variables dans les intégrales multiples fait également intervenir le jacobien. Par exemple, pour le cas de deux variables, si (φ,ψ) est une bijection de classe C1 de T dans D et f une fonction continue de D dans R, on a :
 .
.
Exemple
Le passage en coordonnées polaires est un changement de variables
 défini par l'application suivante :
défini par l'application suivante :La matrice jacobienne au point
 est :
est :Le jacobien du passage en coordonnées polaires est donc
 et on a :
et on a :Interprétation
Matrice jacobienne
Au voisinage du point M, l'approximation linéaire de la fonction F est donnée par :
Jacobien
On se place ici dans R3. Si le jacobien est positif au point M, l'orientation de l'espace est conservée au voisinage de ce point. À l'inverse, l'orientation est inversée si le jacobien est négatif.
Si l'on considère un « petit » domaine, le volume de l'image de ce domaine par la fonction F sera celui du domaine de départ multiplié par la valeur absolue du jacobien.
Application
En mécanique des milieux continus, le tenseur des déformations pour les petites déformations (ou tenseur de Green) est la partie symétrique de la matrice jacobienne du vecteur-déplacement de chaque point du solide.
Voir aussi
Articles connexes
 Portail des mathématiques
Portail des mathématiques
Catégories : Analyse à plusieurs variables | Matrice remarquable






Wikimedia Foundation. 2010.