- ‖
-
Norme (mathématiques)
 Pour les articles homonymes, voir Norme.
Pour les articles homonymes, voir Norme.En géométrie, la norme est une extension de la valeur absolue des nombres aux vecteurs. Elle permet de mesurer la longueur commune à toutes les représentations d'un vecteur dans un espace affine, mais définit aussi une distance entre deux vecteurs invariante par translation et compatible avec la multiplication externe.
La norme usuelle dans le plan ou l'espace est dite euclidienne car elle est associée à un produit scalaire, à la base de la géométrie euclidienne.D'autres normes sont très utilisées sur les espaces vectoriels de dimension finie ou infinie, appelés alors espaces vectoriels normés. Elles sont notamment très importantes en analyse fonctionnelle pour obtenir des majorations, exprimer la différenciation sur les espaces de fonctions d'une ou plusieurs variables réelles ou complexes, calculer estimations et approximations.
Il existe une deuxième définition de la norme, utilisé en arithmétique, elle est traitée dans l'article Norme (arithmétique).
Sommaire
Géométrie euclidienne usuelle
Définition
Si A et B sont deux points du plan ou de l'espace usuel, la norme du vecteur
 est la distance AB c'est-à-dire la longueur du segment [AB]. Elle se note à l'aide d'une double barre :
est la distance AB c'est-à-dire la longueur du segment [AB]. Elle se note à l'aide d'une double barre :  .
.La norme, la direction et le sens sont les trois données qui caractérisent un vecteur et qui ne dépendent donc pas du choix du représentant.
Article détaillé : Vecteur.Calcul
La norme d'un vecteur peut se calculer à l'aide de ses coordonnées dans un repère orthonormé à l'aide du théorème de Pythagore.
- Dans le plan, si le vecteur
 a pour coordonnées
a pour coordonnées  sa norme s'écrit
sa norme s'écrit  .
.
- Si les points A et B ont pour coordonnées respectives
 et
et  alors
alors  .
.
- Dans l'espace, si le vecteur a pour coordonnées
 sa norme s'écrit
sa norme s'écrit  .
.
- Si les points A et B ont pour coordonnées respectives
 et
et  alors
alors  .
.
La norme d'un vecteur peut s'obtenir à partir du produit scalaire :
 .
.
Réciproquement, le produit scalaire peut s'obtenir à partir de la norme grâce à la relation :
 .
.
Propriétés
- La norme ne s'annule que pour le vecteur nul
 .
. - La norme du produit par un nombre est le produit de la norme par la valeur absolue de ce nombre :
-
 .
.
- En particulier, tout vecteur a la même norme que son opposé :
 .
.
Sur un espace vectoriel quelconque
Définition formelle
Soit K un corps muni d'une valeur absolue et E un K-espace vectoriel.
Une norme sur E est une application
 sur E à valeurs réelles positives et satisfaisant les hypothèses suivantes :
sur E à valeurs réelles positives et satisfaisant les hypothèses suivantes :- séparation :
 ;
; - homogénéité :
 ;
; - sous-additivité (appelé également Inégalité triangulaire) :
 .
.
- Remarques
- Les corps des réels et des complexes ne sont pas les seuls à admettre une valeur absolue. Tout corps fini supporte la valeur absolue constante égale à 1 en dehors de 0.
Dans le cas des corps valués, la norme est même ultramétrique en vérifiant une certaine condition plus forte que la sous-additivité. - Une fonction de E dans
 qui ne satisfait que les hypothèses d'homogénéité et de sous-additivité est appelée semi-norme.
qui ne satisfait que les hypothèses d'homogénéité et de sous-additivité est appelée semi-norme.
Un espace vectoriel muni d'une norme est alors appelé espace vectoriel normé (parfois abrégé en EVN).
Article détaillé : Espace vectoriel normé.L'image d'un vecteur x par la norme se note usuellement
 et se lit « norme de x ».
et se lit « norme de x ».Premières propriétés
- La norme est sous-linéaire, c'est-à-dire qu'elle vérifie la propriété suivante :
-
 .
.
- Plus généralement, on obtient par récurrence immédiate l'inégalité dans
 :
:
-
 .
.
- La séparation et l'homogénéité garantissent les propriétés de séparation et de symétrie de la fonction
 . La sous-additivité justifie alors l'inégalité triangulaire,
. La sous-additivité justifie alors l'inégalité triangulaire,
-
- nécessaire pour montrer que d est une distance sur E, qui plus est invariante par translation.
- Un espace vectoriel normé est donc un espace métrique homogène et la topologie associée est compatible avec les opérations vectorielles.
- La sous-additivité permet d'obtenir la propriété suivante :
-
- qui montre que la norme est une application 1-lipschitzienne donc continue.
- La norme est aussi une fonction convexe, ce qui peut être utile pour résoudre des problèmes d'optimisation.
Topologie
Article détaillé : Espace vectoriel topologique.Une norme définit une distance sur son espace vectoriel
 . De plus, à toute distance est associée une topologie. Dans le cas d'une norme, la distance d entre deux vecteurs est donnée par la formule suivante :
. De plus, à toute distance est associée une topologie. Dans le cas d'une norme, la distance d entre deux vecteurs est donnée par la formule suivante :Un ouvert pour la topologie associée est un ensemble
 vérifiant la propriété suivante :
vérifiant la propriété suivante :Cette topologie possède la propriété suivante :
Proposition — L'addition de
 dans ainsi que la multiplication externe de
dans ainsi que la multiplication externe de  dans sont des applications continues pour la topologie associée.Démonstrations
dans sont des applications continues pour la topologie associée.DémonstrationsEn effet, soit
 un point de dans et
un point de dans et  un accroissement, alors :
un accroissement, alors :La majoration précédente montre que l'addition est 1-Lipschitzienne donc uniformément continue.
La multiplication est un peu plus complexe, soit
 un point de et
un point de et  un accroissement tel que le module de
un accroissement tel que le module de  et la norme de
et la norme de  soit plus petit que un, alors si
soit plus petit que un, alors si  est un majorant du module de
est un majorant du module de  et de la norme de
et de la norme de  :
:La dernière majoration montre l'uniforme continuité de la multiplication externe sur la boule fermée de rayon M et donc la continuité en générale. La continuité est démontrée pour la distance associée, elle est équivalente à celle définie par la topologie. Ces deux continuités confèrent à l'espace une structure d'espace vectoriel topologique. Comme la norme vérifie l'axiome de séparation la topologie est séparée.
Boule
Article détaillé : Boule (mathématiques).Cette construction d'une topologie donne toute son importance à la notion de boule ouverte de centre
 et de rayon
et de rayon  , c'est à dire l'ensemble des points dont la distance à est strictement inférieure à . Toute boule ouverte est l'image de la boule unité (ouverte)
, c'est à dire l'ensemble des points dont la distance à est strictement inférieure à . Toute boule ouverte est l'image de la boule unité (ouverte)  par une translation de vecteur et d'une homothétie de rapport .
par une translation de vecteur et d'une homothétie de rapport .Les boules ouvertes centrées en un point
forment une base de voisinages du point , elles caractérisent donc la topologie. La sous additivité montre qu'une boule ouverte est convexe. En effet, comme la convexité est conservée par translation et homothétie, il suffit de montrer cette propriété pour la boule ouverte unité. Si et  sont deux points de cette boule et si
sont deux points de cette boule et si  est un réel entre zéro et un, alors :
est un réel entre zéro et un, alors :La propriété suivante est donc vérifiée :
Propriété — Un espace vectoriel normé est localement convexe.
Ce qui signifie que tout point admet un voisinage convexe, par exemple la boule ouverte de rayon un et de centre le point.
Norme équivalente
Article détaillé : Norme équivalente.Plus la topologie contient d'ouverts, plus précise devient l'analyse associée. Pour cette raison une topologie contenant au moins tous les ouverts d'une autre est dite plus fine. La question se pose dans le cas de deux normes distinctes sur un même espace, de savoir quel critère implique une topologie plus fine.
Soient
 et
et  deux normes sur un espace vectoriel .
deux normes sur un espace vectoriel .- est dite plus fine que si toute suite de
 convergeant pour converge pour , ou encore, s'il existe un réel strictement positif α tel que :
convergeant pour converge pour , ou encore, s'il existe un réel strictement positif α tel que : 
Une conséquence directe est que si une norme est plus fine qu'une autre, alors sa topologie est aussi plus fine.
- et sont dites équivalentes si est plus fine que et est plus fine que , ou encore, s'il existe deux réels strictement positifs α et β tels que :

Cela correspond au fait que dans les boules ouvertes des deux normes puissent s'inclure l'une dans l'autre à dilatation près, ou encore que les deux topologies associées soient confondues. En terme métrique, les deux structures sont uniformément isomorphes. Dans le cas de la dimension finie, toutes les normes sont équivalentes (cf topologie d'un espace vectoriel de dimension finie).
Constructions génériques
- Tout produit scalaire sur un espace vectoriel réel E définit la norme euclidienne associée par :
-
 .
.
- Une norme est euclidienne (c'est-à-dire provient d'un produit scalaire) si et seulement si l'application
 est bilinéaire
est bilinéaire - et dans ce cas cette application est le produit scalaire associé.
- Si f est une application linéaire injective de E dans F alors toute norme sur F induit une norme sur E par l'équation
-
 .
.
- Si C est un ouvert convexe borné et équilibré d'un espace vectoriel réel ou complexe E, alors la jauge de C est une norme définie par
-
- et dont C est la boule unité ouverte.
- Si E et F sont deux espaces vectoriels normés réels ou complexes, l'espace
 des applications linéaires continues est muni de la norme d'opérateur s'écrivant :
des applications linéaires continues est muni de la norme d'opérateur s'écrivant :
-
 .
.
Exemples
En dimension finie
Article détaillé : Topologie d'un espace vectoriel de dimension finie.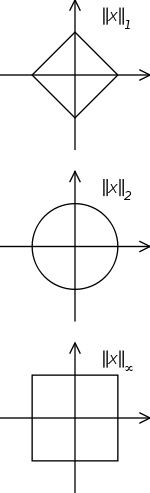
On considère le vecteur
![\emph{\textbf{x}} = [x_1, \dots, x_n]](/pictures/frwiki/49/16ffda6fca99ed80d5e501cedddf8651.png) sur Kn,
sur Kn,- la norme euclidienne est obtenue à partir du produit scalaire ou du produit hermitien canoniques :
-
- et elle correspond à la norme habituellement utilisée pour la distance entre deux points dans le plan ou l'espace usuels (la présence du 2 en indice est expliquée juste après);
- la norme 1 est donnée par la somme des modules (ou valeurs absolues) des coefficients :
-
- et induit la distance de déplacement à angle droit sur un damier (ou dans les rues de Manhattan[1]) ;
- plus généralement, pour tout p supérieur ou égal à 1, la norme p est donnée par la formule suivante :
-
 ,
,
- elle identifie donc la norme euclidienne avec la norme 2, mais n'a surtout d'intérêt que dans sa généralisation aux espaces de fonctions ;
- la norme « infini »[2] d'un vecteur est la limite de ses normes p lorsque p tend vers l'infini :
-
 ,
,
- elle induit la distance de déplacement par les faces et par les coins dans un réseau, comme celui du roi sur l'échiquier.
Les relations d'équivalence entre ces normes sont :
L'inégalité triangulaire pour les normes p s'appelle l'inégalité de Minkowski, elle est une conséquence de résultats de convexité parmi lesquels l'inégalité de Hölder.D'autres exemples apparaissent classiquement :
- La norme sur l'espace des quaternions est la norme euclidienne appliquée à la base (1,i,j,k).
- L'espace des polynômes de degré inférieur ou égal à n peut être muni de normes issues d'espaces de fonctions (voir ci-dessous).
En dimension infinie
- Sur l'espace
![\mathcal C^0([a,b])](/pictures/frwiki/48/0133ebb09430c2b41a15a9ea543a3233.png) des fonctions continues définies sur un segment [a,b] de et à valeurs réelles ou complexes, on retrouve des normes p définies de manières analogues à celles sur les espaces vectoriels de dimension finie pour p supérieur ou égal à 1 :
des fonctions continues définies sur un segment [a,b] de et à valeurs réelles ou complexes, on retrouve des normes p définies de manières analogues à celles sur les espaces vectoriels de dimension finie pour p supérieur ou égal à 1 :
-
- qui permettent notamment de définir les espaces Lp.
- En particulier, la norme euclidienne associée au produit scalaire ou hermitien canonique est définie par
 .
.
- La norme « infini » ou norme sup ou encore norme de la convergence uniforme s'écrit quant à elle
- et s'obtient là aussi comme limite des normes p lorsque p tend vers l'infini.
- Toutes ces normes ne sont pas équivalentes deux à deux.
- Par ailleurs elles s'étendent aisément aux espaces de fonctions continues sur un compact de
 , voire aux fonctions continues à support compact.
, voire aux fonctions continues à support compact.
- Sur l'espace
![\mathcal C^1([a,b])](/pictures/frwiki/102/f4999edbb0f3735fa50edc185b7653c3.png) des fonctions dérivables à dérivée continue, on peut utiliser l'une des normes ci-dessus ou prendre en compte aussi la dérivée à l'aide d'une norme comme suit :
des fonctions dérivables à dérivée continue, on peut utiliser l'une des normes ci-dessus ou prendre en compte aussi la dérivée à l'aide d'une norme comme suit :
-
- afin de considérer l'application dérivée de dans comme continue.
- Sur l'espace
 des suites bornées, la norme naturelle est la norme sup :
des suites bornées, la norme naturelle est la norme sup :
Norme d'algèbre
Définition
Une norme
sur une algèbre A est dite norme d'algèbre s'il existe une constante réelle C telle que .
.
Quitte à multiplier la norme par C, cette constante peut être ramenée à 1. La condition est alors celle de sous-multiplicativité.
Dans le cas d'une algèbre réelle ou complexe, la condition est équivalente à la continuité du produit comme application bilinéaire.
Si l'algèbre est unitaire, on peut exiger de la norme qu'elle vérifie aussi :
 ,
,
auquel cas la multiplication par une constante ne peut plus être utilisée pour « renormaliser » la norme.
Exemples
- L'application module est une norme d'algèbre sur
 considéré comme -algèbre.
considéré comme -algèbre. - La norme d'opérateur sur
 est une norme d'algèbre.
est une norme d'algèbre. - La norme « infini » sur
 induit la norme d'opérateur sur
induit la norme d'opérateur sur  qui s'écrit
qui s'écrit
-
 .
.
Notes et références
Notes
Liens externes
- (fr) Espaces métriques et espaces normés par les mathématiques.net
- (fr) Espace vectoriel normé, espace préhilbertien par B Silvi de l'Université de Jussieu 2005
- (fr) Norme, etc... par DicoMaths
Références
- Haïm Brezis, Analyse fonctionnelle : théorie et applications [détail des éditions]
Une introduction à l'analyse fonctionnelle, il traite surtout deux exemples les Banach et les Hilbert.- S. Lang Analyse Réelle InterEditions, Paris 1977 (ISBN 2729600595)
Le chapitre II traite des espaces vectoriels topologiques en général et en particulier du sujet de l'article.Voir aussi
- Vecteur
- Espace vectoriel normé
- Propriétés métriques des droites et plans
- Distance (mathématiques)
- Norme équivalente
- Produit scalaire
- Norme d'opérateur
- Norme ultramétrique
- Semi-norme
 Portail des mathématiques
Portail des mathématiques
Catégorie : Espace vectoriel normé - Dans le plan, si le vecteur














![{\|f\|}_{\infty} = \sup_{t\in [a, b]} |f(t)|](/pictures/frwiki/56/8a9476448b93458a9e96d731a89b80e0.png)


Wikimedia Foundation. 2010.