- Véhicule automatique de transfert européen
-
Véhicule automatique de transfert européen 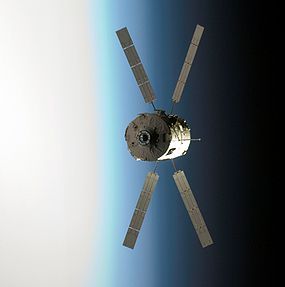
Dimensions Hauteur 10,3 m Diamètre 4,5 m Masse totale 20 750 kg Volume pressurisé 48 m3 Propulsions Poussée 4x490 N/ 4x50 kg Performances Eau 840 litres Ergols 5 540 kg Énergie électrique 3,800 W Capacité Totale 7 600 kg Autonomie 6 mois Historique Premier lancement 2008 Nombre de lancements effectués 3 Le véhicule automatique de transfert européen, ou ATV (en anglais « Automated Transfer Vehicle »), est un vaisseau spatial cargo développé par l'Agence spatiale européenne pour ravitailler la Station spatiale internationale (ISS). Capable de s'amarrer automatiquement à la station comme les vaisseaux russes Progress-M, ce vaisseau cargo peut transporter environ 7,7 tonnes de fret. Il a la capacité de ravitailler la station en consommables, de transporter les pièces de rechange destinées à l'intérieur de la station lorsqu'elles sont compatibles avec le gabarit des écoutilles russes. Ses propulseurs et la réserve de carburant dont il dispose lui permettent de rehausser l'orbite de la station dégradée par la traînée de l'atmosphère résiduelle.
L'ATV est long de 9,79 mètres pour un diamètre de 4,48 mètres et sa masse à vide est de 10,47 tonnes[1]. Il est composé d'un module pressurisé destiné à transporter le fret et d'un module de propulsion qui est utilisé pour hisser le vaisseau de l'orbite atteinte grâce à son lanceur jusqu'à celle de la station spatiale, puis rehausser l'orbite de la station. L'ATV est lancé par une version dédiée de la fusée Ariane 5 qui peut placer ses 20,75 tonnes en orbite basse. A l'issue d'un séjour en orbite dont la durée peut atteindre 6 mois, il se détache de la station et se désintègre en effectuant une rentrée atmosphérique.
L'ATV doit, avec les vaisseaux cargo japonais HTV et les engins américains Cygnus et Dragon du programme COTS, remplacer dans son rôle de ravitailleur la navette spatiale américaine à l'arrêt depuis 2011. Cinq vols d'ATV sont prévus d'ici 2017, dont le premier eu lieu en 2008. Plusieurs véhicules spatiaux dérivés de l'ATV sont en cours d'étude.
L'ATV ravitailleur remorqueur de la station spatiale internationale
L'ATV a été développé par l'Agence spatiale européenne pour apporter sa contribution au ravitaillement et au maintien de l'orbite de la station spatiale internationale. Le vaisseau cargo assure ce rôle avec la navette spatiale américaine dont le retrait est programmé en 2011, le vaisseau japonais HTV et les futurs vaisseaux cargos américains Cygnus et Dragon du programme COTS. Ces derniers doivent remplacer en partie le rôle joué par la navette spatiale. La navette est à la fois le plus polyvalent de tous ces engins, celui qui dispose des plus grandes capacités. L'ATV et l'HTV ont des capacités en tonnage proche mais ont des caractéristiques très différentes. L'HTV ne s'amarre pas automatiquement mais s'approche à portée du bras télécommandé de la station puis est saisi par celui-ci pour être amarré sur la partie non russe de la station. Son écoutille, contrairement à celle de l'ATV, permet le transfert des armoires de grande taille en usage dans la partie non russe de la station. Il peut transporter des pièces détachées à destination de l'extérieur de la station . Par contre il n'a aucune capacité de remorquage.
Comparaison des capacités et prix des engins de ravitaillement de la station spatiale Vaisseau Fret total Fret pressurisé
(m3)Liquides et gaz Fret non
pressuriséRetour à
TerreRemorquage
ergolsType
écoutilleLancements prévus Coût
(cargo/lanceur)ATV 
7,7 tonnes 5,5 t. (46,5 m3) 840 l. eau
100 kg air ou oxygène
860 kg carburantnon non 4 700 kg Russe 6 lancements
(1 tous les 18 mois)150 M€/180 M€ Navette spatiale 
16,4 tonnes 9,4 t. (31 m3)
16 x racks ISPR- 16 tonnes (300 m3) oui non APAS &
CBM4 à 6 vols par an
retirée en 2011312 M€ Progress 
2,2 t.-3,2 t. 1,1 t. (6,6 m3) 300 l. eau
47 kg air ou oxygène
870 kg carburantnon non 250 kg Russe 4 par an 13 M€ /13 M€ HTV 
5,5 tonnes 4,5 t. (14 m3)
8 x racks ISPR300 l. eau 1,5 tonne (16 m3) non non CBM 7 lancements
(1 par an)92 M€/90 M€ En cours de développement en 2011 Cygnus 2 t.-2,7 t. 2 t. (18,7 m3) - 2 t. (18,1 m3) non non CBM 8 d'ici 2016
à partir de 2011 ?190 M$ SpaceX Dragon 6 tonnes 2,5 t. (10 m3) - 3,5 t. (14 m3) oui non CBM 12 commandées
à partir de 2011 ?133 M$ Caractéristiques techniques de l'ATV
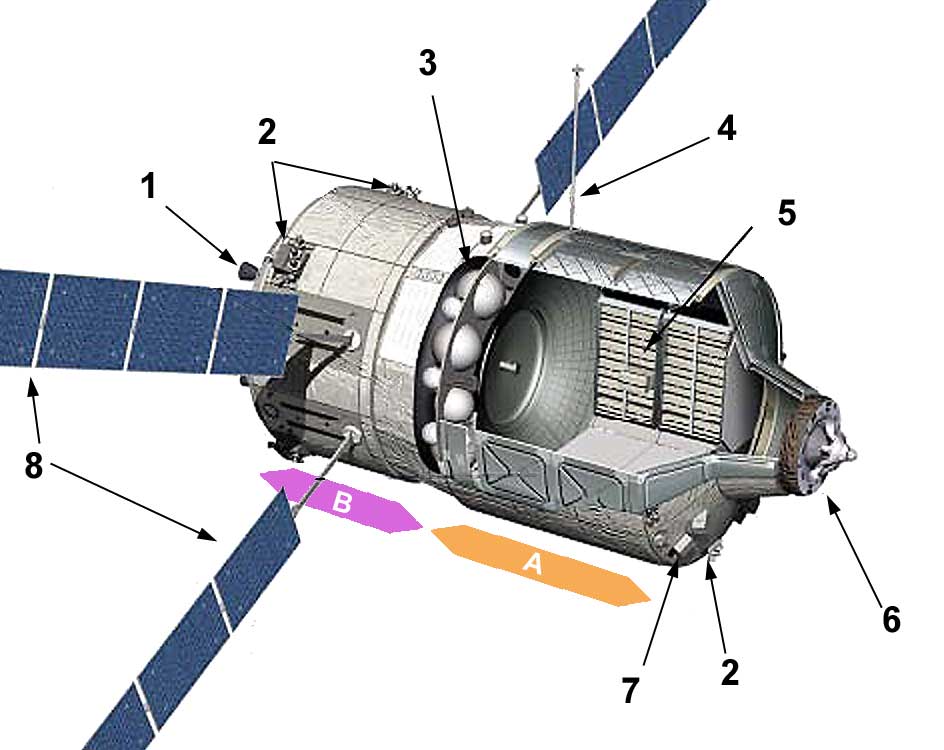
L'ATV est un engin spatial de forme cylindrique qui mesure 10,3 mètres de long et 4,85 mètres de diamètre, pour une masse totale de 10,47 tonnes à vide et de 20,7 tonnes fret et carburant compris. Sa masse a été fixée pour être compatible avec la capacité de lancement de la version ES d'Ariane 5[2]. Il comprend deux modules dans le prolongement l'un de l'autre (voir schéma) :
- le module cargo comportant un compartiment pressurisé d'un volume de 42 m³ transporte le fret (ravitaillement, pièces de rechange principalement russes) destiné à l'intérieur de la station. Les consommables liquides (eau, air et carburant pour le module russe Zvezda) sont transportés dans 22 réservoirs sphériques de différentes taille situées à l'arrière dans la partie non pressurisée du module.
- le module de service regroupe l'avionique du vaisseau, sa propulsion et les réservoirs d'ergols qui alimentent les différents moteurs-fusées.
A l'extrémité du module de service se trouve les tuyères de la propulsion principale tandis que le système d'amarrage et l'écoutille permettant de pénétrer à l'intérieur de la partie pressurisée se trouvent à l'extrémité opposée du module cargo. Les équipements sont conçus pour permettre à l'ATV de rester 6 mois en orbite.
Système d'amarrage
L'ATV est conçu pour s'amarrer à la partie russe de la station spatiale grâce au système sonde-cône qu'utilisent également les vaisseaux Progress ou Soyouz. Le gabarit de l'écoutille d'un diamètre interne de 80 cm permet de transporter toutes les pièces de rechange russes mais pas celles du reste de la station qui nécessitent un gabarit d'écoutille plus important.
Capacité de transport
L'ATV peut embarquer au choix et dans la limite de 7,767 tonnes[2] :
- 100 kg d'air(oxygène et azote) pour renouveler l'atmosphère de la station spatiale ;
- 840 kg d'eau potable pour l'équipage ;
- 840 kg d'ergols pour le système de propulsion de la station qui est logé dans le module russe Zarya. Les moteurs-fusées de ce module fonctionnent avec des ergols différents de ceux utilisés par l'ATV : il s'agit d'UDMH et de peroxyde d'azote.
- 4 500 kg de fret stockable dans la zone pressurisée de l'ATV accessible aux astronautes de la station via une écoutille de 80 cm de diamètre.
- 4 700 kg de carburant utilisé par les moteurs de l'ATV pour maintenir l'orbite de la station durant son séjour dans l'espace.
Contrairement aux autres vaisseaux cargo non russes qui desservent la station, l'ATV ne dispose pas de rangements accessibles depuis l'extérieur permettant de transporter de pièces de rechange à destination de l'extérieur de la station spatiale : réservoir d'ammoniac, gyroscope, expérience scientifique, pièce détachée pour les bras télécommandés ou les panneaux solaires,.... Enfin les caractéristiques de l'ATV, notamment l'absence d'un module de rentrée équipé d'un bouclier thermique et d'un parachute, ne lui permettent pas de ramener du fret à Terre.
Propulsion principale
La propulsion principale est assurée par 4 moteurs-fusées d'une poussée de 490 Newtons développé par la société américaine Aerojet consommant un mélange de Méthylhydrazine et de MON. Ces ergols hypergoliques sont injectés dans la chambre de combustion des moteurs-fusées en étant mis sous pression par de l'hélium stocké à 310 bars. Ces moteurs sont utilisés pour passer de l'orbite sur laquelle l'a laissé le lanceur Ariane 5 (260 km) jusqu'à l'orbite de la station spatiale (350 à 400 km) puis pour rattraper celle-ci. Environ 2 600 kg de carburant sont dédiés à cette phase du vol[1]. Une fois l'ATV amarré à la station, la propulsion principale est utilisée régulièrement pour remonter l'orbite de la station qui diminue de 40 à 100 mètres par jour.
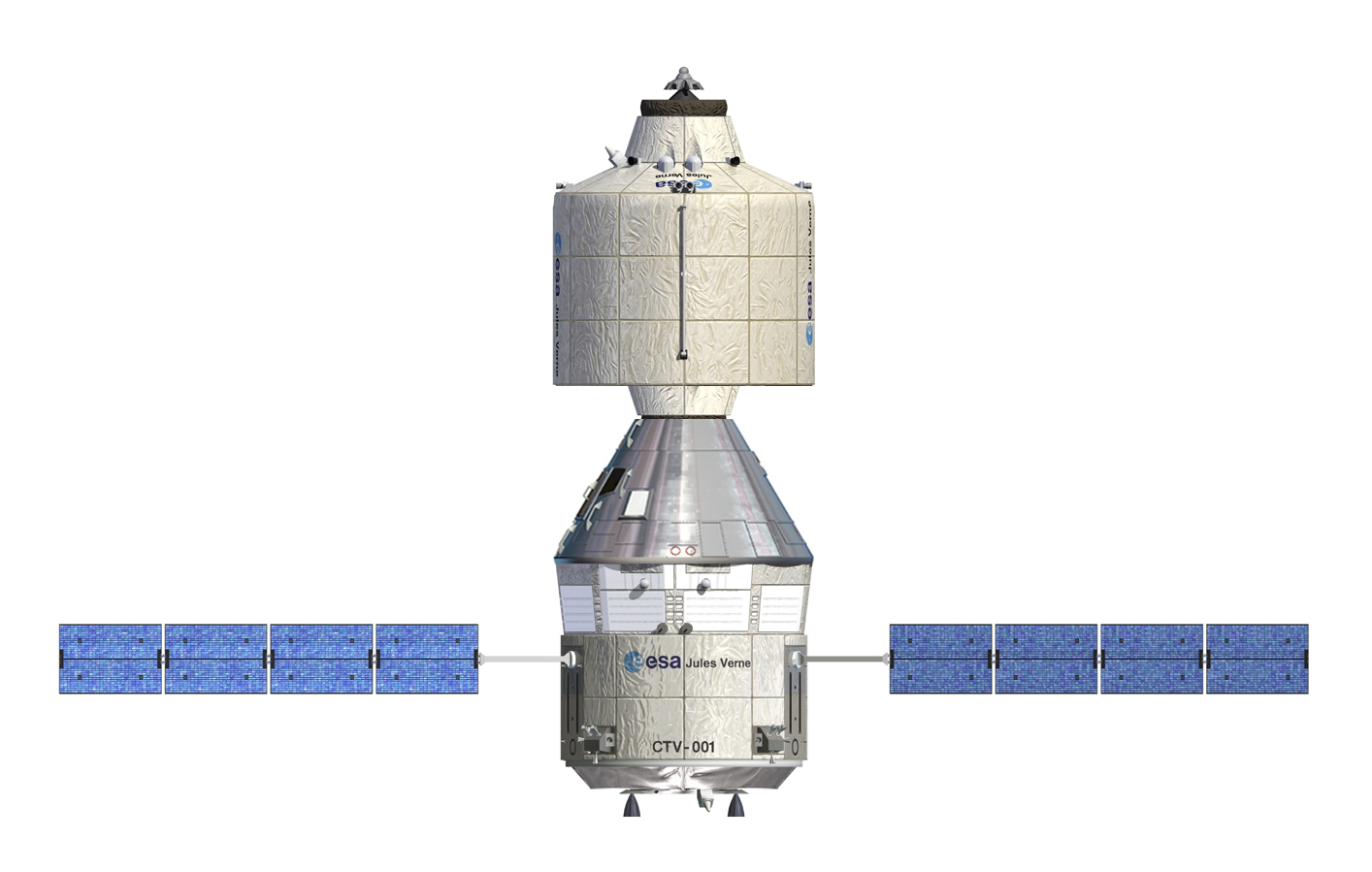
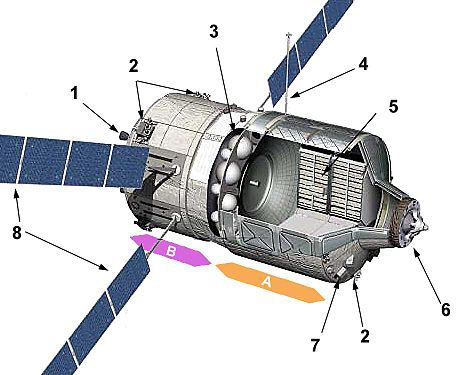 Schéma ATV-2 : A Module cargo : B Module de service ; 1 Propulsion principale ; 2 Moteurs de contrôle d'orientation ; 3 Réservoirs eau, air et ergols ; 4 Antenne ; 5 Volume pressurisé ; 6 Système d'amarrage/écoutille ; 7 Système de guidage ; 8 Panneau solaire
Schéma ATV-2 : A Module cargo : B Module de service ; 1 Propulsion principale ; 2 Moteurs de contrôle d'orientation ; 3 Réservoirs eau, air et ergols ; 4 Antenne ; 5 Volume pressurisé ; 6 Système d'amarrage/écoutille ; 7 Système de guidage ; 8 Panneau solaire
Contrôle d'attitude et guidage
Le vaisseau est stabilisé 3 axes. Son orientation est maintenue à l'aide de 4 groupes de 5 moteurs-fusées et de 4 groupes de 2 moteurs-fusées d'une poussée unitaire de 220 N et consommant les mêmes ergols que les propulseurs principaux. L'ATV utilise un système GPS pour contrôler sa position. Deux senseurs stellaires sont utilisés pour détecter les changements d'orientation.
L'ATV dispose d'une batterie d'équipements installés du côté du système d'amarrage pour les opérations de rendez vous avec la station en mode automatique. Deux télégoniomètres mesurent en continu la distance entre la station et le vaisseau. Deux vidéomètres émettent des impulsions laser vers des cibles installés sur la station pour déterminer la distance et l'orientation de la station spatiale. Deux cibles sont utilisés par l'équipage de la station pour contrôler l'approche finale de l'ATV[3].
Énergie
Pour faire fonctionner les équipements chargés de la navigation et du guidage ainsi que maintenir la partie pressurisée à des températures suffisantes, l'ATV a besoin de 400 Watts lorsqu'il est passif c'est-à-dire amarré à la station spatiale et 900 Watts lorsqu'il est en transit. Il dispose à cet effet de 16 panneaux solaires répartis sur 4 ailes : les cellules solaires, qui couvrent une superficie totale de 33,6 m², fournissent 4,8 kW d'énergie électrique (3,8 kW en fin de mission). Lorsque les panneaux solaires sont déployés en orbite, l'envergure du vaisseau atteint 22,28 mètres. L'énergie électrique produite est stockée dans quatre batteries NiCd et quatre batteries LiMnO2 de 40 Ah chacune pour permettre d'alimenter en énergie les équipements lorsque le Soleil est masqué et que les panneaux solaires ne sont plus éclairés[1].
Télécommunications
L'ATV communique avec les stations à Terre en bande S en utilisant comme relais le réseau de satellites de télécommunications géostationnaires TDRS de la NASA. Les télécommunications avec la station spatiale sont assurées également en bande S. Pour la navigation le vaisseau cargo utilise un système GPS.
Structure, contrôle thermique et protection anti micrométéorite
La coque du vaisseau est réalisée en alliage d'aluminium (Al-2219 pour la partie pressurisée). La protection contre les micro météorites est assurée classiquement par une succession de barrières chargées d'absorber l'énergie cinétique puis de l'arrêter. La couche externe est constituée par une feuille d'aluminium Al-6061-T6 sous laquelle se trouvent plusieurs couches de Nextel et de Kevlar. La protection thermique est réalisée par un revêtement multi-couches en Kapton recouvert d'une couche d'or. Ce système est complété par un réseau de caloducs chargé de transporter la chaleur excédentaire vers des radiateurs. La partie pressurisée dispose d'un système de ventilation qui assure la circulation de l'air [N 1]et d'un système de détection d'incendies[1].
Déroulement d'une mission
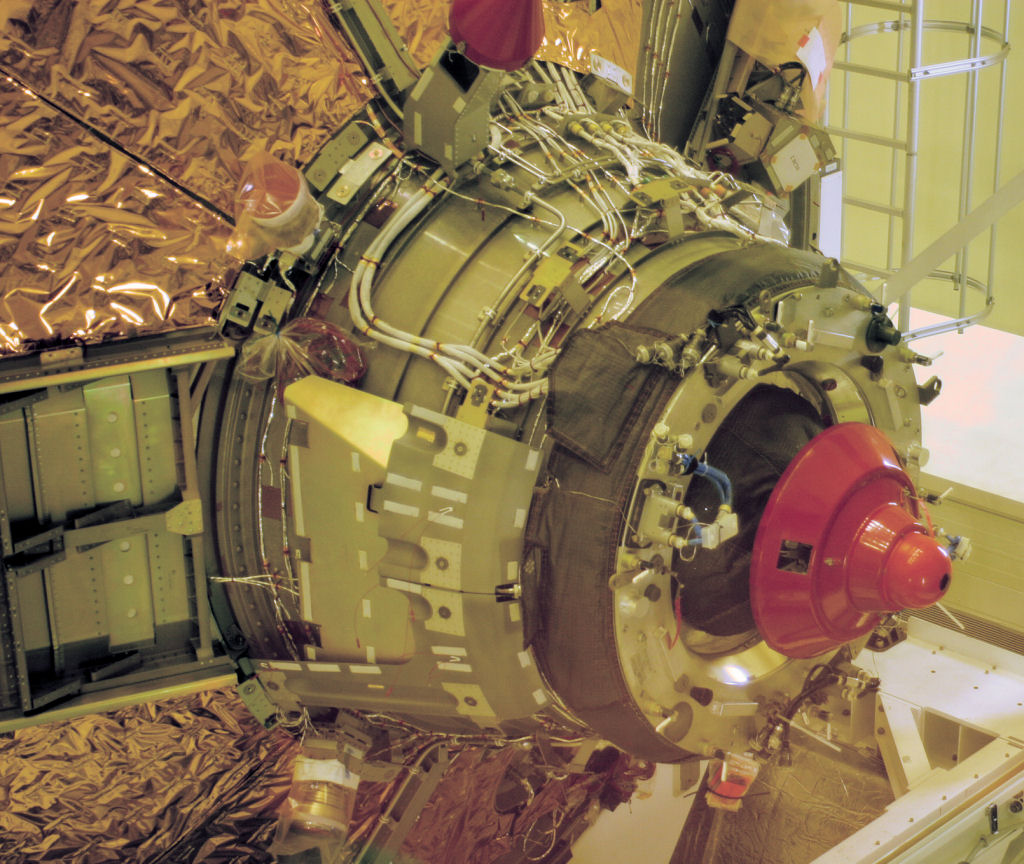
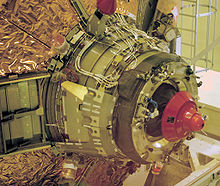 Pièce d'amarrage sonde-cône de l'ATV
Pièce d'amarrage sonde-cône de l'ATVUne mission de l'ATV se décompose en 5 phases :
- Le lancement par la fusée Ariane 5 et les premières opérations en orbite
- Les manoeuvres de rendez-vous spatial qui permettent à l'ATV de rejoindre la station spatiale
- L'approche finale et l'amarrage à la station
- La période de séjour accroché à la station
- Les manœuvres de départ, de réduction d'orbite et la rentrée atmosphérique
Préparation
Le vaisseau ATV est lancé depuis la base de lancement de Kourou en Guyane française par une fusée Ariane 5. Le vaisseau cargo est transporté par bateau depuis l'Europe. A son arrivée, le fonctionnement des différents sous-systèmes est contrôlé. La campagne de lancement proprement dite débute environ 2 mois avant le tir. Les réservoirs contenant les différents types de carburant sont remplis puis le fret est chargé. L'ATV est mis en place au sommet du lanceur deux à trois semaines avant la date de lancement et recouvert d'une coiffe destinée à assurer l'aérodynamisme de l'ensemble dans les couches basses de l'atmosphère.
Lancement
L'Ariane 5 ES, chargée de placer l'ATV en orbite est une version du lanceur dédiée à ce type de lancement qui comporte une structure renforcée pour supporter la masse du vaisseau. Le deuxième étagé EPS (pour Étage à propergols stockables) propulsé par un moteur Aestus peut être rallumé plusieurs fois[4]. Le début du vol est similaire à celui des autres vols Ariane. Après le décollage du lanceur, celui se sépare des accélérateurs à poudre au bout de 2 minutes 22 secondes de vol. La coiffe est larguée au bout de 3 minutes 30 de vol puis c'est le tour du premier étage EPC au bout de 8 minutes 58 secondes. Le seconde étage EPS est alors allumé pour une durée d'environ 8 minutes[5]. A son extinction, l'ATV se trouve placé sur une orbite de 260 x 146 km avec une inclinaison de 51,6°. Après une phase balistique (c'est-à-dire non propulsée) de 40 minutes au-dessus de l'Europe et de l'Asie, le deuxième étage est rallumé brièvement pour placer le vaisseau sur une orbite circulaire de 260 km x 260 km . L'ATV se sépare du lanceur au-dessus du Pacifique Sud environ 63 minutes après le lancement. Les panneaux solaires sont déployés ainsi que les antennes de télécommunication. Le système de navigation et de guidage est activé et le vaisseau passe en mode de vol autonome.
Rendez-vous avec la station
L'ATV doit ensuite rejoindre la station spatiale qui se trouve dans le même plan orbital mais sur une orbite plus élevée (entre 350 et 400 km). Le vol pour rejoindre l'orbite de la station spatiale, l'approche et l'amarrage à celle-ci sont entièrement automatisés et contrôlés à partir du Centre spatial de Toulouse (ATV-CC), lié au Centre national d'études spatiales (CNES). L'amarrage s'effectue sur le module de service russe Zvezda situé à une des deux extrémités de la station.
Séjour en orbite et rentrée atmosphérique
Les systèmes de l'ATV sont conçus pour que le vaisseau puisse rester jusqu'à 6 mois dans l'espace. A intervalles réguliers ses moteurs sont utilisés pour relever l'orbite de la station spatiale afin de compenser les conséquences de la trainée générée par l'atmosphère résiduelle. Ils puisent à cet effet dans des réserves d'ergols dédiés à cet usage. Durant son séjour dans l'espace, la partie pressurisée est progressivement remplie des déchets produits par l'équipage de la station. Lorsqu'il a épuisé le carburant consacré au remorquage de la station, il se détache de celle-ci, réduit son orbite jusqu'à pénétrer dans les couches plus denses de l'atmosphère qui accélèrent sa chute vers la Terre. L'ATV, qui entame sa descente à 7 km/s, est détruit au cours de la rentrée atmosphérique par la chaleur engendrée par le frottement de l'atmosphère sur sa coque.
Développement et production
La premier document de conception de l'ATV est produit en 2000 et les spécifications sont figées en 2003. Les tests démarrent mi 2005 et le premier vol a lieu en mars 2008. Le maître d'œuvre de l'ATV est EADS Astrium Space Transportation qui mène pour le compte de l'Agence spatiale européenne (ESA) un consortium composé de nombreux sous-contractants. Les bureaux du maître d'œuvre sont pour l'instant aux Mureaux (France) et seront transférés à Brême (Allemagne) une fois le développement terminé et la production des exemplaires successifs entamée. Le client, l'ESA dispose pendant tout le développement d'une équipe intégrée sur le site des Mureaux. Le développement de l’ATV est complexe car il a du respecter à la fois des règles de sécurité formulées par les autorités spatiales russes et américaines[6].
Le premier ATV est lancé par une fusée Ariane 5 depuis la base de Kourou en Guyane française, dans la nuit du 8 au 9 mars 2008 à 01 h 03 min heure locale. Il a été baptisé Jules Verne, du nom du premier auteur de science-fiction des temps modernes. Les contrats et accords existants prévoient la production de quatre exemplaires supplémentaires de l'ATV, qui seront lancés au rythme d'environ un par an (Voir le paragraphe « Vols programmés »). Ces lancements s'étaleront de 2009 à 2013, en vertu d'accords entre la NASA et l'ESA.
Le second ATV a lui aussi été lancé par une fusée Ariane 5 depuis la base de Kourou, dans la nuit du 16 au 17 février 2011 à 22 h 50 min (heure de Paris). Il a été baptisé Johannes Kepler, astronome célèbre pour avoir étudié l’hypothèse héliocentrique (la Terre tourne autour du Soleil) de Nicolas Copernic, et surtout pour avoir découvert que les planètes ne tournent pas en cercle parfait autour du Soleil mais en suivant des ellipses.
Les deux principaux sous-contractants du projet sont :
- Thales Alenia Space, dans son établissement de Turin, en Italie, responsable du développement et de la production du module pressurisé ;
- RKK Energia (Russie) qui fournit le système d'amarrage (RDS, Russian Docking System), le système de ravitaillement (refuelling system) ainsi que divers équipements électriques.
Première mission : l'ATV-001 Jules Verne
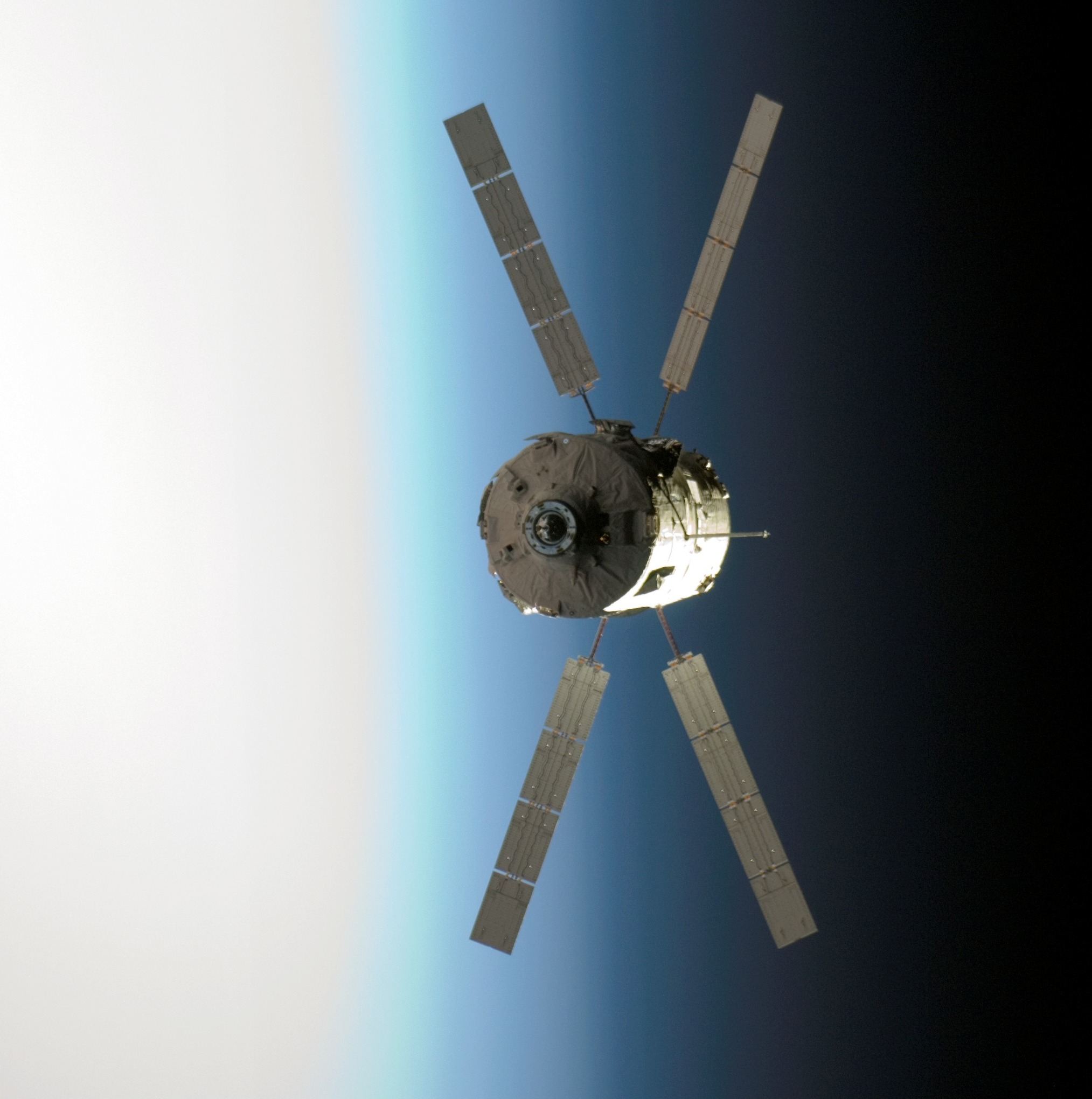
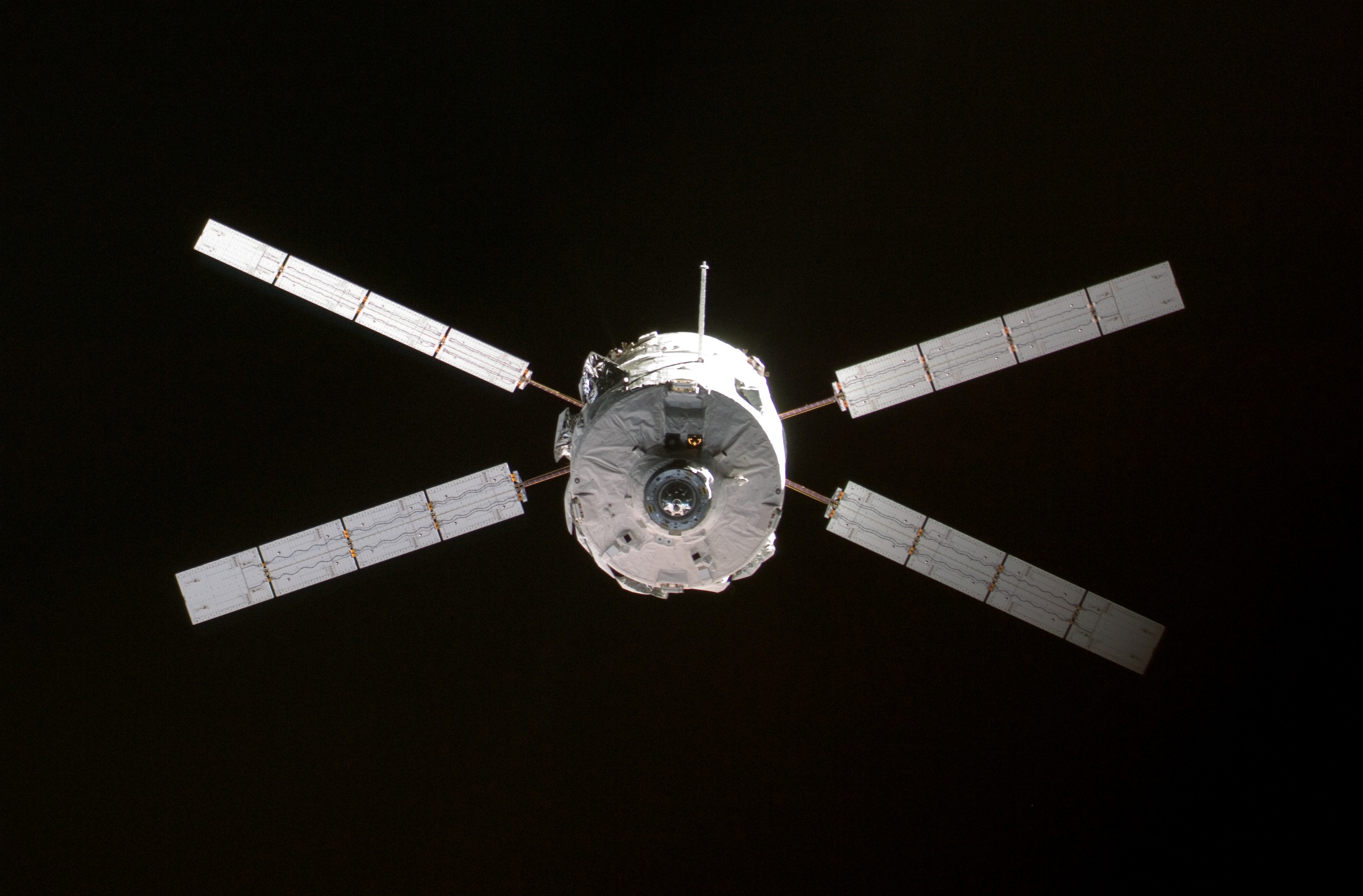
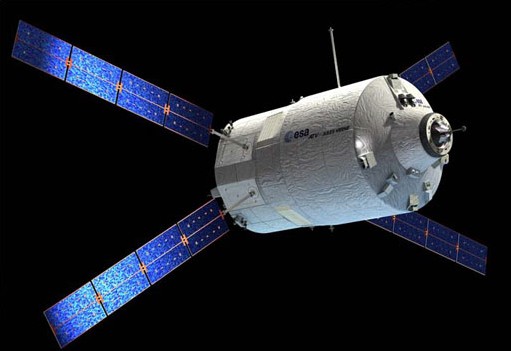
 La partie pressurisée de l'ATV Jules Verne en orbite
La partie pressurisée de l'ATV Jules Verne en orbiteLancement
Le premier lancement (vol 181 d'Ariane) du Jules Verne a eu lieu le 9 mars 2008 à 01 h 03 (heure locale), 4 h 03 UTC[7]. La fusée Ariane 5 ES a suivi une trajectoire très particulière (départ direction France métropolitaine), et son moteur Aestus a été allumé trois fois[4]. Après une première phase propulsée au-dessus de l'océan Atlantique, l'étage supérieur EPS (pour Étage à propergols stockables) a été arrêté et après une longue phase balistique, c'est-à-dire sans aucune propulsion, au-dessus de l'Europe et de l'Asie, cet étage a été rallumé pour une deuxième poussée et c'est au-dessus du Pacifique Sud que l'ATV se sera séparé du lanceur.
Comme lors de tout lancement d'Ariane, les données de télémesure, faisant état du comportement du lanceur et des évènements importants survenus, émises pendant les phases propulsées, ont été reçues par un réseau de stations qualifié d'atypique car constitué de moyens et de lieux en grande partie nouveaux. Ce réseau est constitué de, outre la station habituelle de Kourou [8]:
- la Station Navale Ariane (SNA), mobile, embarquée sur un navire au nord de l'Amérique du Sud, déjà utilisée lors de certains lancements
- une nouvelle station fixe sur un site créé sur l'île de Santa Maria aux Açores
- une station fixe de l'Institut de Recherche en Télécommunications située à Adélaïde
- une station mobile installée sur un nouveau site, créé à Awarua, près d'Invercargill au sud de la Nouvelle-Zélande. C'est cette dernière station qui aura reçu l'information de séparation de l'ATV du lanceur.
Enfin, à l'issue d'une orbite complète, une dernière station, située au Sud-Ouest de l'Australie, à Dongara, aura permis de suivre un troisième allumage de l'EPS, cette dernière poussée ayant pour but de désorbiter l'étage supérieur d'Ariane 5 pour le précipiter dans l'océan Pacifique.
Validation de la procédure d'urgence anti-collision
L'ATV dispose d'un dispositif nommé collision avoidance manoeuvre, ou CAM, qui peut être activé depuis le sol ou bien de manière automatique par le monitoring and safety unit si la situation d'amarrage présente un risque de collision. Le mode de fonctionnement de la procédure est complètement indépendant des organes primaires de l'ATV. Le système informatique et les logiciels sont physiquement différents, l'alimentation se fait par des batteries séparées. Le but, en cas de risque de collision, est d'allumer des moteurs durant 3 minutes, pour provoquer un freinage d'urgence, puis éloigner le vaisseau de la station. Un calculateur de bord choisit une trajectoire pour mener l'ATV hors d'une zone nommée Keep out sphere, sphère virtuelle de 200 mètres de rayon autour du centre de gravité de la station. Cette procédure induit l'arrêt des systèmes de l'ATV et l'activation d'un mode de survie. La manœuvre est modélisée par l'ESA dans le lien suivant : Manœuvre anti-collision[9]. Le 14 mars 2008 à 10 h 45 CET, le test du CAM s'est révélé positif.
Amarrage à la station spatiale
L'amarrage de l'ATV Jules Verne à la station spatiale internationale (ISS) a lieu le 3 avril 2008 comme prévu, en mode automatique. La séquence d'approche finale a débuté à 10 h 32 (TU), le vaisseau se trouvait alors à 39 km derrière ISS. Il a alors navigué par GPS et s'est approché jusqu'à un point situé à 3,5 km où il s'est arrêté pendant 30 minutes, le temps que l'équipage de la station fasse des tests d'arrêt et de recul. Il est ensuite reparti à une vitesse de 40 cm/s avant de s'arrêter pendant 37 minutes à 249 m de la station. À 13 h 53, les instruments laser sont mis en marche. Puis il entame une approche à la vitesse de 7 cm/s pour s'arrêter 15 minutes à 19 m d'ISS. Il est alors 14 h 14 (TU). Il reprend ensuite sa course s'arrêtant une dernière fois à 11 m pendant 6 minutes. Arrivé à 1 m, les astronautes ne pouvaient plus intervenir. Finalement, le contact eut lieu à 14 h 45 min 30 s (TU) et la fermeture des crochets de jonction à 14 h 52 (TU)[10].
Les astronautes n'ouvrent l'écoutille de l'ATV que le 4 avril pour y placer un appareil de filtrage de l'air. Le lendemain à 8 h 30 (TU), l'équipage a pu allumer la lumière, débrancher l'appareil de filtrage, amener des appareils respiratoires portables et un extincteur[10]. Le premier voyage de l'ATV a amené 9 357 kg de charges dont 3 556 kg d'ergols. La charge cargo était constituée de 1 150 kg de vêtements, équipements et nourriture, 269 kg d'eau, 21 kg d'oxygène[10]. Cet amarrage est une étape importante pour l'Agence spatiale européenne qui dispose désormais d'un vaisseau cargo opérationnel[9].
Seconde mission : l'ATV-002 Johannes Kepler
Le second ATV est nommé Johannes Kepler, du nom de l'astronome allemand. Le choix de ce nom a été soutenu par l'Agence spatiale allemande (DLR), alors que l'année 2009 est le jubilé de la publication de l'œuvre majeure de Kepler, Astronomia nova où il y énonce les deux premières Lois de Kepler [11].
Son lancement était initialement prévu pour le 15 février 2011[12] par une fusée Ariane 5, mais un incident conduit à l'arrêt de la séquence synchronisée concernant le remplissage du réservoir d'oxygène liquide de l'étage principal du lanceur[13] , le tir a été reporté au 16 février 2011 et s'est déroulé avec succès. Le coût de cette mission est estimé à 450 M€ dont 220 M€ pour le vaisseau cargo, 150 M€ pour le lanceur, et 70 M€ pour le suivi opérationnel [14]. L'ATV Johannes Kepler s'est amarré le 24 février 2011 à 15h59 GMT à l'ISS[15].
Il s'est désamarré le 20 juin 2011 à 14h46 TU de la station spatiale et s'est désintégré dans l'atmosphère terrestre le 21 juin 2011 à 20h41 TU[16].
Vols programmés
Missions passées et programmées[17],[18] # Date de lancement Désignation Date d'amarrage 1 9 mars 2008, 4:03 UTC Jules Verne 3 avril 2008 2 16 février 2011, 21:50 UTC[12] Johannes Kepler[19] 24 février 2011[15] 3 2012 Edoardo Amaldi[20] 4 2014 Albert Einstein[21] 5 2016 ATV-5 Planifié Évolutions et vaisseaux dérivés à l'étude

La mise au point de l'ATV combinée avec l’expérience ARD, permet à l'agence spatiale européenne de disposer des compétences techniques pour concevoir un système de transport spatial habité. Il n'existe toutefois pas aujourd'hui de volonté de lancer un programme spatial habité.
Plusieurs évolutions de l’ATV ont été envisagées[22] :
- Un cargo assurant le retour du fret sur Terre. Avec le retrait de la navette spatiale américaine il n'est plus possible de ramener à Terre les équipements lourds pour les remplacer ou les mettre à niveau. Une version modifiée de l'ATV pourrait répondre à ce besoin : le module cargo du vaisseau serait remplacée par une capsule de rentrée dotée d'un bouclier thermique permettant de ramener plusieurs centaines de kg sur Terre. Ce projet pourrait bénéficier des résultats du démonstrateur de rentrée atmosphérique européen qui a volé en 1998 ainsi que des travaux réalisés sur le Crew Return Vehicle de la station spatiale.
- Un vaisseau spatial habité (Crew Transport Vehicle ou CTV). Il s'agit d'un développement logique du vaisseau précédent. Il nécessite de développer une tour de sauvetage et un système de support de vie. Une collaboration avec l'agence spatiale russe a été envisagée autour du concept du CSTS Crew Space Transportation System) mais a été abandonnée en 2009.
Notes et références
Notes
- En l'absence de gravité l'air stagne.
Références
- (fr)ATV-2 Johannes Kepler factsheet, ESA. Consulté le 18 février 2011[PDF]
- ATV: a cargo tug for the international space station, EADS Astrium, 11 février 2009. Consulté le 16 février 2011
- (fr)ATV Integrated Cargo Carrier, ESA. Consulté le 18 février 2011
- Quelques détails du lancement de l’ATV Ariane et l’ATV : le lancement de l’ATV, la famille Ariane 5, les vols habités, Galileo...
- (en)Présentation du lancement de l'ATV Kepler, Arianespace, janvier 2011
- Outre une prouesse technologique, un chemin de croix diplomatique…Le succès de l’amarrage de l’ATV à l’ISS
- Jules Verne ATV launch rescheduled to 9 March, ESA (3 mars 2008).
- (fr) Le CSG accueille l'ATV Jules Verne sur le site du Cnes
- (fr) http://www.esa.int/esaCP/France.html
- Christian Lardier, « Amarrage nominal pour l'ATV », dans Air et Cosmos, no 2120, 11 avril 2008, p. 36-37 (ISSN 1240-3113)
- ATV: après Jules Verne, Kepler ?, TechnoScience.net, 11 février 2009. Mis en ligne le 11 février 2009, consulté le 31 janvier 2010
- www.esa.int
- www.esa.int
- Ariane 5 Sends ATV-2 on its Way to the Space Station, Space News, 11 février 2009. Consulté le 16 février 2011
- http://www.lefigaro.fr/flash-actu/2011/02/24/97001-20110224FILWWW00625-le-ravitailleur-europeen-amarre-a-l-iss.php
- Dernières informations de Ciel et Espace
- (en)Space.com, « European Cargo Ship Begins Maiden Space Voyage », 9 mars, 2008
- NASA, « Multi-Program Integrated Milestones », 25 janvier, 2008
- L'ESA baptise Johannes Kepler le second ATV, dans Air & Cosmos, N° 2161, 27 février 2009
- (en) Third ATV named after Edoardo Amaldi
- ISS: un vaisseau Einstein
- (en)ESA, « ATV evolution: Advanced Reentry Vehicle (ARV) ». Consulté le 19 février 2011
Sources principales
- (en) EADS Astrium, ATV Jules Verne Launcj kit, mars 2008 [lire en ligne][PDF]
Voir aussi
Liens internes
- Autres cargos spatiaux :
- Propositions de développements à partir de l'ATV :
Liens externes
- (fr) Dossier de vol 200 Ariane 5ES ATV-2 Johannes Kepler
- (fr) Dossier de vol 181 Ariane 5ES ATV Jules Verne
- (fr) ATV, podcast de Ciel et Espace
- (fr) Le blog Cnes de l'ATV
- (en) Site officiel de l'ESA sur l'ATV

Wikimedia Foundation. 2010.