- Canadarm 2
-
Le système de service mobile (en anglais Mobile Servicing System, ou MSS), également appelé par métonymie Canadarm 2, est un équipement externe de la station spatiale internationale permettant de déplacer des modules et des équipements extérieurs de la station et pouvant assister les astronautes au cours des sorties extravéhiculaires.
Le principal composant est le bras manipulateur Canadarm2 (également appelé Space Station Remote Manipulator, ou SSRMS). Il peut être attaché sur un chariot mobile (le MBS) circulant sur la poutre de la station. Canadarm2 peut utiliser une "main" plus agile - le Special Purpose Dexterous Manipulator ou SPDM - surnommée Dextre pour les manipulations délicates. L'ensemble est commandé par les astronautes depuis l'intérieur de la station grâce à deux stations de travail dédiées. Les spationautes doivent recevoir un entraînement au sol pour apprendre à utiliser le MSS.
Le système de service mobile a été conçu et réalisé par la société MDA Space Missions (autrefois appelée MD Robotics et encore avant, SPAR Aerospace). C'est la principale contribution de l'Agence spatiale canadienne à la station spatiale internationale.
Sommaire
Canadarm2
 Le Canadarm2
Le Canadarm2
Lancé sur le vol STS-100 le 19 avril 2001, la nouvelle génération de Canadarm est une version plus grande, plus forte et plus intelligente du bras robotique de la navette spatiale. Canadarm2 mesure 17,6 mètres de long lorsqu'il est complètement déplié. Il possède 7 articulations motorisées. Sa masse est de 1 800 kg et son diamètre est de 35 cm. Le bras peut manipuler des charges pesant jusqu'à 116 000 kg et est utilisé pour arrimer la navette spatiale à la station. Le système de manipulation à distance de la station spatiale ou SSRMS, peut changer de point d'attache avec ses deux préhenseurs situés à ses extrémités, il peut ainsi se déplacer sur la surface extérieure de la station en allant de point d'attache en point d'attache. Son déplacement est uniquement limité par le nombre de Power Data Grapple Fixtures (PDGF). Ceux-ci, répartis sur la station lui fournissent l'alimentation et les connexions pour sa commande et la vidéo. D'autre part, le bras peut également aller d'un bout à l'autre de la station grâce à la base mobile (MBS), située sur la poutre principale, véritable colonne vertébrale de la station.
 L'astronaute Leroy Chiao utilisant une station de contrôle de Canadarm2 dans le module laboratoire Destiny.
L'astronaute Leroy Chiao utilisant une station de contrôle de Canadarm2 dans le module laboratoire Destiny.La plupart du temps, les opérateurs qui utilisent le MSS, voient ce qu'ils font grâce aux trois écrans LCD des stations de travail robotiques (Robotic Work Station (RWS)). L'ISS compte 2 de ces stations et une seule peut contrôler le robot en même temps. Lorsque la station sera terminée, une de ces stations sera située dans le module américain Destiny et l'autre dans la coupole Cupola. Actuellement, ces deux stations sont dans le module Destiny. Chaque RWS compte deux jeux de joysticks : le contrôleur manuel de rotation (RHC) et le contrôleur manuel de translation(THC), un panneau de contrôle et d'affichage (DCP) et un ordinateur portable (PCS).
Système de base mobile
Une plate-forme se déplaçant sur un rail de la longueur de la station, le système de base mobile ou MBS, offre une mobilité latérale au Canadarm2 le long de la poutre principale de la station. Le MBS a été ajouté à la station lors du vol STS-111 en juin 2002.
Le nom exact et complet du MBS est "MRS Base System", où MRS signifie "Mobile Remote Servicer".
Manipulateur agile spécialisé
Article détaillé : Special Purpose Dexterous Manipulator. Dextre, la "main" du Canadarm2 (NASA).
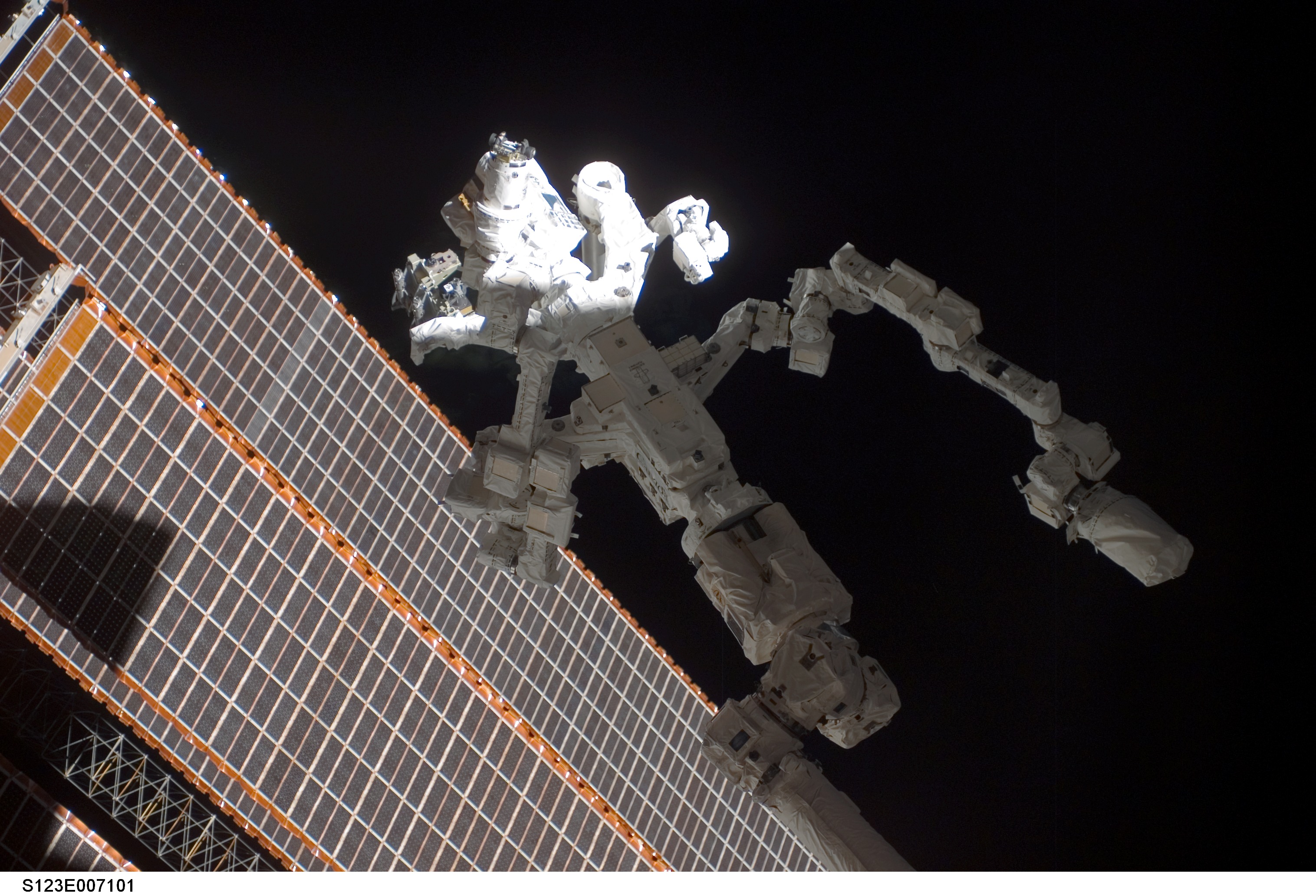
Dextre, la "main" du Canadarm2 (NASA).Le manipulateur agile spécialisé, ou la main canadienne ("Dextre"), est un robot à deux bras (3,3 m) capable de réaliser des tâches d'assemblage, d'arrimage et d'entretien (charge max de 600 kg) délicates (2 à 6 mm de précision), généralement effectuées par des astronautes lors de sorties extravéhiculaires (EVA). Conçu par MD Robotics de Brampton, en Ontario, des tests ont été réalisés dans la chambre de simulation spatiale de l'Agence spatiale canadienne au laboratoire David Florida à Ottawa. Le transport de Dextre sur la station a été réalisé le 11 mars 2008 par la mission STS-123 de la navette Endeavour. L'arrimage de Dextre est effectif depuis le 13 mars 2008. La même mission STS-123 a amené la première partie du laboratoire japonais Kibo (4 m x 4,4 m).
Voir aussi
Liens internes
- Shuttle Remote Manipulator System, le Canadarm de la navette spatiale américaine
- Bras télémanipulateur européen, prévu pour être installé sur l'ISS
Liens externes
- (fr) Canadarm, sur le site de l'Agence spatiale canadienne
- (en) ISS Assembly: Canadarm2 and the Mobile Servicing System
- (fr) Dextre (Manipulateur agile spécialisé), sur le site de l'Agence spatiale canadienne
Catégories :- Station spatiale internationale
- Programme spatial canadien



Wikimedia Foundation. 2010.