- Équations différentielles ordinaires
-
Équation différentielle
En mathématiques, une équation différentielle est une relation entre une ou plusieurs fonctions inconnues et leurs dérivées. L'ordre d'une équation différentielle correspond au degré maximal de différenciation auquel une des fonctions inconnues a été soumise.
Les équations différentielles sont utilisées pour construire des modèles mathématiques de phénomènes physiques et biologiques, par exemple pour l'étude de la radioactivité ou la mécanique céleste. Par conséquent, les équations différentielles représentent un vaste champ d'étude, aussi bien en mathématiques pures qu'en mathématiques appliquées.
Sommaire
Définition
Les premiers exemples
Même si ce n'est pas la discipline qui a fait naître les équations différentielles, la dynamique des populations en illustre de façon simple des exemples parmi les plus accessibles. Ainsi l'étude d'une population isolée, dans un milieu produisant de la nourriture en abondance, conduit au modèle suivant pour l'effectif x en fonction du temps t
C'est-à-dire que l'accroissement de population x'(t), est à chaque instant, proportionnel à la taille de la population x(t) . Les solutions de cette équation font apparaître un phénomène de croissance exponentielle. Cet exemple, avec les exemples les plus simples d'équations différentielles sont décrits dans l'article équation différentielle (mathématiques élémentaires).
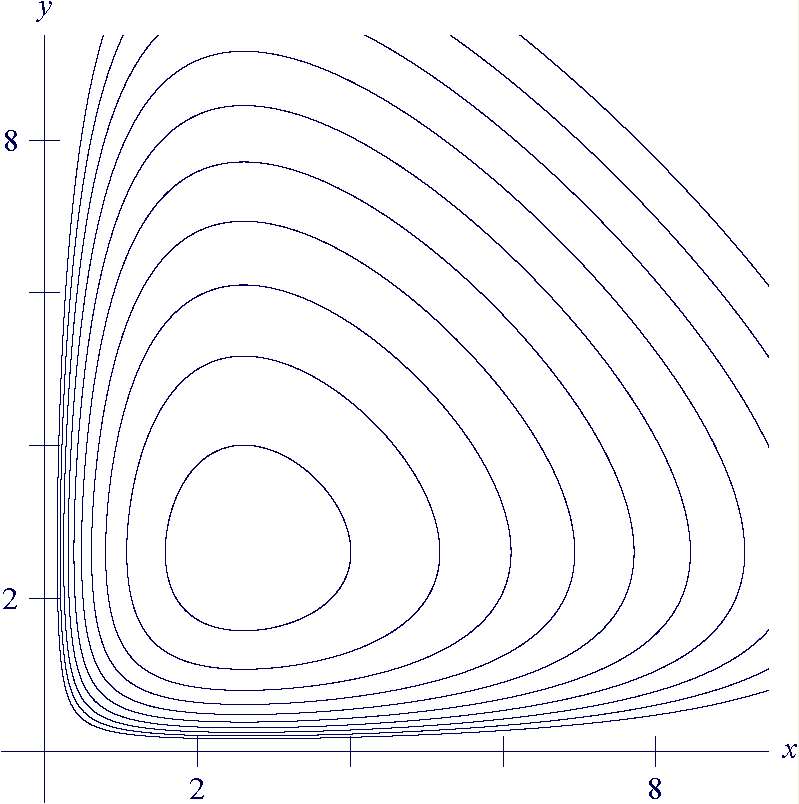
 Les courbes d'évolution des populations pour les équations de Lotka-Volterra.
Les courbes d'évolution des populations pour les équations de Lotka-Volterra.
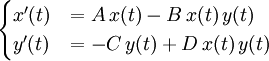
Un système plus complexe, formé de deux espèces, proie et prédateur, conduit aux équations de Lotka-Volterra
L'effectif des proies est x(t) , celui des prédateurs y(t) . On retombe sur le cas précédent si y est nul. La quantité x(t)y(t) est une probabilité de rencontre, qui influe négativement sur une population (les proies), positivement sur l'autre (les prédateurs). À chaque instant, connaissant les populations en présence, on peut décrire la tendance. Ces deux équations sont couplées c'est-à-dire qu'il faut les résoudre ensemble. Mathématiquement, il faut les concevoir comme une seule équation d'inconnue le couple (x(t),y(t)) . Si l'effectif initial des populations est connu, l'évolution ultérieure est parfaitement déterminée. Elle se fait le long d'une des courbes d'évolution figurées ci-contre, qui laissent apparaître un comportement cyclique.
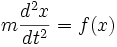
Une des plus célèbres équations différentielles est la relation fondamentale de la dynamique, de Newton : f = ma , où m est la masse d'une particule, f la force exercée sur celle-ci et a l'accélération qui en résulte. Dans le cas d'un mouvement rectiligne, si la force subie est fonction de la position (par exemple dans le cas d'un ressort) on obtient une équation de la forme
Cette fois, pour déterminer parfaitement le mouvement, il faut se donner position et vitesse initiales.
Équation différentielle, processus d'évolution et déterminisme
Les caractéristiques d'un système régi par une équation différentielle sont les suivantes :
- Les états a priori possibles pour le système forment un espace de dimension finie, c’est-à-dire peuvent être décrits par un nombre fini de variables. Cet espace est l'espace des phases. Par exemple, pour décrire le mouvement d'une particule dans l'espace usuel, il faut trois variables. Pour le mouvement d'un solide, six sont nécessaires.
- Les lois qui gouvernent l'évolution temporelle sont des fonctions au moins dérivables.
- L'évolution du système est déterministe : connaissant les conditions initiales, c'est-à-dire l'état du système au temps présent, on peut en déduire l'état du système à n'importe quel temps du futur ou du passé.
L'aspect déterministe des équations différentielles a des implications particulièrement fortes, et se concrétise mathématiquement par le théorème de Cauchy-Lipschitz.
Les équations différentielles ordinaires (parfois représentées par le sigle EDO) doivent être distinguées des équations aux dérivées partielles (EDP), où y est fonction de plusieurs variables et où interviennent des dérivées partielles. Ces dernières ont un espace d'état de dimension infinie et ne sont plus nécessairement des processus d'évolution déterministes.
Définition générale
Soit E un espace vectoriel de dimension finie.
Par définition, une équation différentielle (parfois : équation différentielle ordinaire) est une équation de la forme suivante
 où F est une fonction continue sur un ouvert U de
où F est une fonction continue sur un ouvert U de  , appelé domaine.
, appelé domaine.L'ordre de cette équation différentielle est l'ordre n de la plus haute dérivée y apparaissant. Soient y une fonction de x définie d'un intervalle I dans E et
 les dérivées successives de la fonction y. Cette fonction y est dite solution si elle est de classe
les dérivées successives de la fonction y. Cette fonction y est dite solution si elle est de classe  et si
et siRésoudre une équation différentielle revient à trouver les fonctions solutions y. Par exemple, l'équation différentielle y ' ' + y = 0 a une solution générale de la forme : y(x) = A.cos x + B. sin x, où A, B sont des constantes (qu'on peut déterminer si on ajoute des conditions initiales).
Dans une équation différentielle, la fonction y peut être à valeurs réelles, ou à valeurs dans un espace vectoriel de dimension finie, ainsi si y a pour composantes y1 et y2 :
L'usage en physiques est de parler alors de système d'équations différentielles couplées. Mais le point de vue fécond en mathématiques est de n'y voir qu'une seule équation, pour une fonction à valeurs vectorielles.
On peut encore élargir la définition, en considérant des équations différentielles sur des variétés différentielles.
Solutions
Durée de vie
Si y est solution d'une équation différentielle sur l'intervalle I, on peut considérer sa restriction à un intervalle J inclus dans I. Celle-ci restera solution de l'équation différentielle. Une solution est encore appelée courbe intégrale.
Il est souvent judicieux de ne considérer que les solutions maximales, encore appelées courbes intégrales maximales, c'est-à-dire celles qui ne sont les restrictions d'aucune autre. L'intervalle de définition est nommé intervalle maximal.
Il ne faut pas croire pour autant que les solutions maximales sont définies sur
 entier. Il est tout à fait possible qu'elles aient une durée de vie finie dans le futur ou dans le passé. Il en est ainsi des solutions de l'équation y'=y2, par exemple.
entier. Il est tout à fait possible qu'elles aient une durée de vie finie dans le futur ou dans le passé. Il en est ainsi des solutions de l'équation y'=y2, par exemple.Cependant, si une solution reste confinée dans un domaine compact, alors elle a une durée de vie infinie.
Équation différentielle sous forme résolue
Une équation différentielle d'ordre n est mise sous forme résolue quand on peut exprimer la dérivée la plus forte en fonction de x et des dérivées précédentes
où G est une fonction continue.
Exemple
L'équation différentielle scalaire d'ordre 1 sous forme résolue : y ' = G(x, y), admet une interprétation géométrique simple dans le plan ramené à un repère d'axes (Ox), (Oy). On peut représenter, attaché en chaque point de coordonnées x, y, le vecteur de composantes 1 et G(x, y), ce qui constitue un champ de vecteurs du plan. Les courbes solutions sont des représentations graphiques de fonctions y = f(x), continûment dérivables, dont la tangente en chaque point est donnée par le champ de vecteurs.
Forme résolue et forme implicite
Les équations différentielles qui peuvent se mettre sous forme résolue jouissent de bonnes propriétés théoriques, avec un théorème d'existence et d'unicité de solutions : le théorème de Cauchy-Lipschitz.
Dans le cas contraire on dit que l'équation différentielle est sous forme implicite. On essaie, sur les domaines les plus grands possibles, de mettre l'équation différentielle sous forme résolue. Puis on doit procéder au raccordement des solutions obtenues. Le traitement des équations différentielles de ce type sera évoqué en fin d'article.
Conditions initiales, théorème de Cauchy-Lipschitz
Une condition initiale ou condition de Cauchy, pour une équation d'ordre n d'inconnue y est la donnée d'une valeur x0 et de n vecteurs Y0,..., Yn-1. La fonction solution y satisfait ces conditions initiales si
Un problème de Cauchy est la donnée d'une équation différentielle avec un jeu de conditions initiales.
Pour une équation différentielle sous forme résolue, moyennant une hypothèse de régularité assez peu exigeante (caractère localement lipschitzien à x fixé, par rapport au bloc des autres variables), le théorème de Cauchy-Lipschitz énonce que, pour chaque condition initiale
- il existe une solution qui la satisfait et qui est définie sur un intervalle de la forme ]x0 − α,x0 + α[
- il existe une unique solution maximale qui la satisfait.
Conditions aux limites
Un autre problème classique est celui des conditions aux limites, pour lequel on prescrit les valeurs d'une fonction solution en plusieurs points, voire les valeurs des limites d'une fonction solution aux bornes du domaine. Ainsi le problème:
Un tel problème (parfois appelé problème de Dirichlet) peut très bien n'avoir aucune solution ou au contraire une infinité de fonctions solutions.
Résolution explicite
La résolution explicite des équations différentielles, à l'aide des fonctions usuelles et de l'opérateur de primitivation, est rarement possible. Un petit nombre d'équations possédant des formes particulières peuvent être ramenées par changements de variables successifs à l'équation la plus simple de toutes : l'équation
 qui est une simple primitivation.
qui est une simple primitivation.Parmi les équations différentielles pouvant être entièrement résolues sont les équations linéaires scalaires d'ordre un, les équations à variables séparées, les équations homogènes, l'équation de Bernoulli, les équations différentielles vectorielles à coefficients constants.
D'autres peuvent être entièrement résolues dès lors qu'une solution particulière est connue, ainsi l'équation différentielle linéaire d'ordre deux, l'Équation différentielle de Riccati.
Propriétés de continuité des solutions
Continuité par rapport aux conditions initiales et aux paramètres
La donnée des conditions initiales x0, Y0,..., Yn-1 définit une unique fonction solution qu'on peut noter S(x0, Y0,..., Yn-1, x). On définit ainsi une fonction globale S qui prend le nom de flot, coulée ou encore courant et qui rend compte de la façon dont les solutions varient avec les conditions initiales. Son domaine d'existence est un ouvert.
En se plaçant dans les hypothèses du théorème de Cauchy-Lipschitz, les solutions dépendent continûment des conditions initiales, c'est-à-dire que la fonction S est une fonction continue de l'ensemble de ses variables.
Si on fait dépendre continûment le système d'un paramètre λ, il y a également continuité de S par rapport à ce paramètre. En effet ajouter un paramètre peut se ramener à modifier le système. Il suffit de rajouter une composante Λ à la fonction cherchée, et lui demander de vérifier l'équation Λ' = 0 et la condition initiale Λ(x0) = λ.
Propriétés globales
Soit y une solution particulière de l'équation différentielle, avec pour conditions initiales x0, Y0,..., Yn-1. La propriété de continuité permet de donner le comportement des solutions correspondant à des conditions initiales voisines.
- si on restreint la solution à un segment [xi, xf] contenant x0, les solutions de conditions initiales voisines forment un tube de solutions autour de la solution y.
Plus précisément, pour tout
0" style="max-width : 98%; height: auto; width: auto;" src="/pictures/frwiki/98/b0f19c5714fe9f9891ed26ff783cf639.png" border="0">, il existe η > 0 tel que si z est solution avec des conditions initales x0, Z0,..., Zn-1 et les Zi η-proches des Yi, alors la solution z est tracée dans un voisinage tubulaire de y, de rayon
 .
.Par conséquent, si on prend une suite zn de telles solutions, dont les conditions initiales tendent vers celles de y, la suite zn converge uniformément vers y.
- si on étudie la solution sur tout son domaine d'existence, une telle propriété n'est plus vérifiée.
Stabilité des solutions
La solution (
,0) de l'équation différentielle x'=f(t,x) est stable s'il existe une fonction de LiapounovEffet papillon, chaos
Les propriétés de continuité précédentes sont à manier avec précaution, puisqu'elles n'apportent pas d'information quantifiée. Dans la pratique, on observe dans de nombreux systèmes une sensibilité extrême sur le long terme à de petites variations initiales, phénomène popularisé par Edward Lorenz sous le nom d'effet papillon. Pour rendre compte de façon satisfaisante de l'évolution d'un système physique sur un temps très long, il faudrait pousser les mesures de conditions initiales jusqu'à une précision inenvisageable. Ainsi il faudrait englober dans le calcul des prévisions météorologiques de très long terme jusqu'aux battements des ailes de papillon.
Les systèmes régis par des équations différentielles, bien qu'étant en principe déterministes, peuvent arborer des comportements extrêmement complexes et paraissant désordonnés, chaotiques. Henri Poincaré fut le premier à éclaircir cette notion de chaos déterministe. Ses idées tarderont à être reprises, mais servent maintenant de fondement à la théorie des systèmes dynamiques.
Classifications
Équation différentielle autonome
 Tracé d'une courbe intégrale (bleu) suivant un champ de vecteurs (vert)
Tracé d'une courbe intégrale (bleu) suivant un champ de vecteurs (vert)Un cas particulier important est celui où la variable n'apparaît pas dans l'équation fonctionnelle, alors qualifiée d'autonome : ainsi l'équation y' = f(y).
Les lois de la physique s'appliquent en général à des fonctions du temps, et se présentent sous forme d'équations différentielles autonomes, ce qui manifeste l'invariance de ces lois dans le temps. Ainsi si un système autonome revient à sa position initiale au bout d'un intervalle de temps T, il connaît dès lors une évolution périodique de période T.
L'étude des équations autonomes est équivalente à celle des champs de vecteurs. Pour une équation du premier ordre, les solutions sont une famille de courbes qui ne se coupent pas (d'après le théorème de Cauchy-Lipschitz) et qui remplissent l'espace. Elles sont tangentes au champ de vecteurs en chaque point.
Voir aussi théorème de Poincaré-Bendixson.
Équation différentielle linéaire
Une équation différentielle est dite linéaire quand l'expression de l'équation est linéaire (ou plus généralement affine) relativement au bloc de variables (y,y',...y(n)). Une équation différentielle linéaire scalaire d'ordre n et d'inconnue y sera donc de la forme
où
 ,
,  , ...
, ...  ,
,  sont des fonctions numériques.
sont des fonctions numériques.Une équation différentielle linéaire vectorielle d'ordre n aura le même aspect, en remplaçant les ai par des applications linéaires (ou souvent des matrices) fonctions de x. Une telle équation sera parfois aussi appelée système différentiel linéaire.
Particularités des équations différentielles linéaires sous forme résolue
- les solutions ont une durée de vie infinie.
- on peut superposer (faire des combinaisons linéaires) de solutions d'équations différentielles linéaires
- quand l'équation est homogène (an + 1 = 0), son ensemble de solutions est un espace vectoriel de dimension n fois la dimension de E.
- il suffit donc d'exhiber un nombre suffisant de solutions indépendantes de l'équation homogène pour la résoudre. On peut tester l'indépendance de solutions à l'aide du wronskien.
- l'ensemble des solutions de l'équation générale est un espace affine : la solution générale est formée de la somme de cette solution particulière avec la solution générale de l'équation linéaire homogène associée.
- la Méthode de variation des constantes permet, une fois résolue l'équation homogène, de résoudre l'équation complète
- dans le cas d'équations à coefficients constants, on dispose de formules de résolution explicites à l'aide d'exponentielles de matrices ou d'endomorphismes, ou encore en utilisant la transformation de Laplace.
Équation différentielle holomorphe
Une équation différentielle holomorphe est l'homologue, pour la variable complexe, d'une équation différentielle ordinaire. La théorie générale en est beaucoup plus complexe.
Résultats locaux
Une équation différentielle holomorphe sous forme résolue vérifie l'analogue du théorème de Cauchy-Lipschitz : existence et unicité locales d'une fonction solution, elle-même holomorphe.
En outre si l'équation dépend de paramètres de façon holomorphe, la solution aussi. Il y a aussi dépendance holomorphe en les conditions initiales.
Cependant il n'y a plus en général raccordement en une unique solution maximale.
Résultats globaux
On connaît des difficultés même pour l'équation différentielle la plus simple : le calcul de primitives. Par exemple la construction d'une fonction telle que le logarithme complexe n'est pas univoque. On peut chercher à construire des déterminations de la fonction logarithme sur les ouverts les plus grands possibles : par exemple des plans fendus. On peut aussi construire une primitive « le long d'un chemin ». Apparaît alors le phénomène de monodromie : si le chemin fait un tour dans le sens direct autour de l'origine, la primitive est modifiée d'une constante (2iΠ). Pour rendre compte de la situation, il faut faire intervenir les concepts de revêtement, point de branchement.
Les fonctions puissances sont également solutions d'équations différentielles simples et susceptibles de présenter de la monodromie. Ainsi l'équation z' = − z3 n'admet aucune solution non nulle holomorphe, ni même méromorphe sur le plan entier.
Cas linéaire
La théorie des équations différentielles holomorphes linéaires sous forme résolue est très semblables à celle des équations pour la variable réelle, tant qu'on reste sur des domaines simplement connexes. Sinon elle donne également lieu à des problèmes de type point de branchement.
Méthodes numériques
La résolution des équations différentielles par quadrature (c'est-à-dire à l'aide des opérations élémentaires et de la primitivation) n'est possible que dans un nombre de cas très restreints. Par exemple, même les équations différentielles linéaires scalaires d'ordre deux n'admettent pas de telle formule de résolution générale. Il est donc indispensable de disposer de techniques de résolution approchée.
Méthode d'Euler
Cette méthode, la plus ancienne et la plus simple, possède également un intérêt théorique puisqu'elle permet de prouver un résultat d'existence de solutions sous des hypothèses plus faibles que le théorème de Cauchy-Lipschitz : c'est le théorème de Cauchy-Peano-Arzela.
On considère une équation différentielle d'ordre 1 sous forme résolue y'=f(x, y), avec la condition initiale y(x0)=y0.
Le principe est d'approcher la solution y sur [a, b] par une fonction affine par morceaux, en opérant une discrétisation du paramètre : on pose
- xi = a + ih où h = (b − a) / n est le pas.
La fonction affine par morceaux joindra donc les points de coordonnées (xi, yi), et il s'agit de proposer un algorithme pour construire les yi à partir de y0. Sur chaque intervalle [xi, xi+1] on prend pour pente du segment affine celle que suggère l'équation : f(xi, yi).
Autres méthodes
Article détaillé : résolution numérique d'équation différentielle.Les plus classiques sont les méthodes de Runge-Kutta, la méthode de Newmark, la méthode des différences finies ou la méthode des éléments finis qui est plus adaptée pour les E.D.P.
Équation différentielle sous forme implicite
Traitement d'un exemple
 Tracé de quelques solutions de (y')²+xy'-y=0. En bleu les solutions régulières, en vert la solution singulière, en rouge la solution hybride mentionnée dans le texte
Tracé de quelques solutions de (y')²+xy'-y=0. En bleu les solutions régulières, en vert la solution singulière, en rouge la solution hybride mentionnée dans le texteSoit l'équation différentielle implicite
Pour l'étudier on effectue un régionnement du plan : on distingue les valeurs (x, y) pour lesquelles l'équation T2+xT-y=0 admet 0,1 ou 2 solutions. On obtient trois régions U, V, W. La région V est la parabole d'équation
 , les régions U et W sont les deux ouverts qu'elle délimite.
, les régions U et W sont les deux ouverts qu'elle délimite.On commence par s'intéresser aux solutions qui ne sont tracées que sur un des trois domaines
- Dans la région U, l'équation n'admet aucune solution.
- Il y a une solution tout entière tracée dans V, c'est la solution singulière tracée en vert ci-contre.
- Dans l'ouvert W, l'équation peut être mise sous l'une des deux formes résolues
Chacune de ces deux équations vérifie le théorème de Cauchy-Lipschitz. Si on se restreint à l'ouvert W, il y a donc exactement deux solutions pour chaque couple de solutions initiales. Elles sont tracées en bleu sur la figure ci-contre. Dans le cas présent il s'agit d'ailleurs de droites, d'équation
Elles sont tangentes à la parabole d'équation
. Plus précisément, les solutions tracées sur W sont ces droites, arrêtées au point de tangence puisqu'on sort de W.On peut maintenant faire l'étude de l'équation différentielle sur le plan entier. Il existe alors des solutions « hybrides » formées en raccordant de façon
 un arc de parabole (verte) avec les solutions rectilignes (bleues). Ainsi la solution représentée en rouge :
un arc de parabole (verte) avec les solutions rectilignes (bleues). Ainsi la solution représentée en rouge :Un tel raccordement ne peut se faire qu'en un point de V. La description de l'ensemble de toutes les solutions se ferait en discutant en fonction de la condition initiale x0, y0
- Condition initiale dans U : pas de solution
- Condition initiale dans V : pour les valeurs de x supérieures à x0, la solution peut être la parabole entière, ou alors on suit un arc de parabole puis on bifurque sur la tangente. De même pour les valeurs inférieures à x0.
- Condition initiale dans W : il y a d'abord deux droites solutions, tangentes à la parabole. Soit on les prolonge indéfiniment, soit on les quitte pour la parabole au niveau du point de tangence. On continue alors sur la parabole, ou on repart sur une tangente un peu plus loin.
Généralisation
Article détaillé : équation différentielle implicite.Pour généraliser cette étude il faut se placer dans un espace à trois dimensions, de coordonnées notées (x, y,p). À l'équation différentielle est associée la surface d'équation F(x, y,p)=0 (la coordonnée p permet de représenter y' ). Les solutions sont des courbes tracées sur la surface. Les difficultés rencontrées viennent de ce que ces courbes sont projetées sur le plan (x, y). L'application de projection connaît des points critiques aux points où le gradient de F est « vertical ». Ce sont ces points qui se projettent en la parabole verte.
Finalement, le cadre d'étude est le même que celui de la théorie des enveloppes. La parabole, solution singulière est ici l'enveloppe de la famille des droites, solutions régulières.
Bibliographie
- Équations différentielles et systèmes dynamiques, John Hubbard et Beverly West, Éd. Cassini
- Vladimir Arnold, Équations Différentielles Ordinaires, Editions Mir, Moscou, 1974. Contient beaucoup d'exemples.
- Calcul différentiel et intégral, F. Laudenbach, Éd. École Polytechnique
- Jean-Pierre Demailly, Analyse numérique et équations différentielles [détail des éditions]
- Vladimir Damgov, Nonlinear and parametric phenomena. Applications to radiometric and mechanical systems, World Scientific, Series on Nonlinear Sciences, 2004.
- Lev Pontriaguine, Équations différentielles ordinaires, Moscou, Éditions Mir, 1969; (un des meilleurs livres, en français, sur le sujet avec un exposé trés clair sur l'application de Poincaré (en) utilisée dans la théorie du chaos).
- E. L. Ince, Ordinary differential equations, Dover Publications, New-York. 1926. Très utile pour la théorie des équations différentielles linéaires avec des conditions aux limites.
Voir aussi
- Exemples d'équations différentielles
- Équation différentielle homogène d'ordre n
- Application de la transformée de Laplace aux équations différentielles
- Résolution des équations différentielles
- Systèmes oscillants à un degré de liberté
- Équation différentielle (mathématiques élémentaires)
 Portail des mathématiques
Portail des mathématiques
Catégories : Équation | Analyse fonctionnelle | Équation différentielle








Wikimedia Foundation. 2010.