- Variete differentielle
-
Variété différentielle
En mathématiques, les variétés différentielles ou variétés différentiables sont les objets de base de la topologie différentielle et de la géométrie différentielle. Il s'agit de variétés sur lesquelles il est possible d'effectuer les opérations du calcul différentiel et intégral.
Une variété différentielle se définit d'abord par la donnée d'une variété topologique, espace topologique localement homéomorphe à l'espace euclidien
 . Les homéomorphismes locaux sont appelés cartes et définissent des systèmes de coordonnées locales. La structure différentielle est définie en exigeant certaines propriétés de régularité des applications de transition entre les cartes. Cette structure permet par exemple de donner une définition globale de la notion d'application différentiable.
. Les homéomorphismes locaux sont appelés cartes et définissent des systèmes de coordonnées locales. La structure différentielle est définie en exigeant certaines propriétés de régularité des applications de transition entre les cartes. Cette structure permet par exemple de donner une définition globale de la notion d'application différentiable.Sommaire
Définition par un atlas
Pour une introduction informelle voir l'article Variété (géométrie).
Cartes locales et atlas
Article détaillé : carte locale.
Une variété topologique M de dimension n est un espace topologique séparé à base dénombrable, tel que chacun de ses points admet un voisinage ouvert homéomorphe à un ouvert de l'espace vectoriel topologique
. Plus précisément : , il existe un voisinage ouvert Ux et un homéomorphisme
, il existe un voisinage ouvert Ux et un homéomorphisme  . On dit alors que
. On dit alors que  est une carte locale de M.
est une carte locale de M.Une famille de cartes
 qui recouvre (entièrement) M constitue un atlas de la variété M.
qui recouvre (entièrement) M constitue un atlas de la variété M.Un tel atlas est dit de classe Ck,
 si : pour tous les indices i,j tels que
si : pour tous les indices i,j tels que 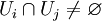 , l'application de changement de cartes
, l'application de changement de cartesest un difféomorphisme de classe Ck.
Structure de variété différentielle
Deux atlas de classe Ck sur une même variété topologique M sont dits compatibles lorsque leur réunion est encore un atlas de classe Ck. La relation de compatibilité ainsi introduite est une relation d'équivalence pour les atlas.
Les classes d'équivalence définissent la structure de variété différentielle : une variété différentielle (ou variété différentiable) de classe Ck est une variété topologique munie d'une famille d'atlas de classe Ck tous compatibles avec un atlas donné.
Dans chaque classe d'équivalence existe un représentant privilégié, l'atlas maximal, obtenu en considérant toutes les cartes compatibles avec l'atlas initial.
Les exemples les plus classiques de variétés différentielles sont les ouverts de l'espace euclidien
, la sphère de dimension n, le tore de dimension n, les espaces projectifs réels ou complexes.Variantes
On obtient une variété analytique en exigeant que les applications de changements de cartes soient des fonctions analytiques.
La géométrie complexe étudie les variétés analytiques complexes (ou variétés complexes), définies de façon analogue sur le corps des complexes, avec des applications de changement de cartes qui sont biholomorphes.
Il est possible d'étudier des variétés modelées sur des espaces vectoriels de dimension infinie, comme les variétés de Banach ou de Fréchet.
Applications différentiables
Définition
La différentiabilité d'une fonction f entre deux variétés différentielles M et N se définit en procédant à la lecture de f dans des cartes locales au voisinage de chaque point.
Formellement, on considère deux variétés M et N de classe Ck et un entier j inférieur à k. Une application
 est dite de classe Cj quand, pour tout point m de M, on peut trouver une carte locale (U,φ) de M centrée en m et une carte locale (V,ψ) de N centrée en n=f(m) telles que
est dite de classe Cj quand, pour tout point m de M, on peut trouver une carte locale (U,φ) de M centrée en m et une carte locale (V,ψ) de N centrée en n=f(m) telles que est bien définie et est de classe Cj de φ(U) dans ψ(V).
est bien définie et est de classe Cj de φ(U) dans ψ(V).
Si on considère de nouvelles cartes locales, la régularité des applications de changement de cartes assure que les fonctions fφ',ψ' correspondantes seront régulières, ce qui montre la cohérence de la définition.
Il est un peu plus délicat de définir la notion de différentielle d'une application différentiable, puisque cela demande d'introduire au préalable les vecteurs tangents. Cependant, le rang de la différentielle de fφ,ψ au point m ne dépend pas des cartes choisies. On parle notamment d'immersion si ce rang est égal en tout point à la dimension de M, de submersion s'il est égal en tout point à la dimension de N[1].
Variétés isomorphes
La composée d'applications de classe Cj entre deux variétés, quand elle existe, est de classe Cj. Les variétés différentielles de classe Ck forment une catégorie dont les morphismes sont les applications de classe Ck.
Deux variétés différentielles M et N de classe Ck sont isomorphes lorsqu'il existe un Ck-difféomorphisme de M dans N (c'est-à-dire une application bijective de classe Ck ainsi que sa réciproque).
Du point de vue du calcul différentiel, il est possible d'identifier deux variétés isomorphes. La géométrie différentielle a pour objet premier l'étude des structures différentielles modulo la relation d'isomorphisme.
Existence et unicité de structures différentielles
Alors que la théorie des variétés différentielles est foncièrement différente de celle des variétés topologiques, le degré de différentiabilité utilisé est sans importance autre que technique : en effet, selon un théorème de Whitney[2], toute structure de variété C1 peut être raffinée en une stucture de variété analytique, et deux structures de variétés analytiques sur une même variété C1, si elles ne coïncident pas forcément, sont isomorphes.
On connaît au contraire des variétés topologiques qui admettent plusieurs structures différentielles non isomorphes. Le premier exemple, découvert en 1956 par John Milnor[3], est la sphère de dimension 7. Il existe par ailleurs des variétés topologiques qui n'admettent aucune structure différentielle (Michel Kervaire, 1960[4]).
Les questions d'existence et d'unicité ne se posent qu'à partir de la dimension 4, puisqu'une variété topologique de dimension inférieure à 3 possède une unique structure différentielle[5]. La dimension 4 est la première dimension pour laquelle l'existence et l'unicité sont mises en défaut.
Cette dimension joue à plusieurs égards un rôle particulier : on sait ainsi que pour toute valeur de n différente de 4, l'espace
possède une unique structure différentiable, alors qu'il existe une infinité non dénombrable de structures non isomorphes sur  . En toute dimension autre que 4, une variété topologique compacte possède au plus un nombre fini de structures différentielles non isomorphes. Ces découvertes reposent sur une succession de travaux publiés entre 1982 et 1987[6]. En 1982, Michael Freedman établit la classification des variétés topologiques compactes simplement connexes de dimension 4 [7]. L'année suivante, Simon Donaldson montre que les structures différentielles sont soumises à des contraintes beaucoup plus fortes[8] ; il découvre également de nouveaux invariants de la structure différentielle[9]. Ces travaux sont exploités pour montrer l'existence de structures exotiques sur : Clifford Taubes montre même en 1987 qu'il en existe une infinité non dénombrable[10].
. En toute dimension autre que 4, une variété topologique compacte possède au plus un nombre fini de structures différentielles non isomorphes. Ces découvertes reposent sur une succession de travaux publiés entre 1982 et 1987[6]. En 1982, Michael Freedman établit la classification des variétés topologiques compactes simplement connexes de dimension 4 [7]. L'année suivante, Simon Donaldson montre que les structures différentielles sont soumises à des contraintes beaucoup plus fortes[8] ; il découvre également de nouveaux invariants de la structure différentielle[9]. Ces travaux sont exploités pour montrer l'existence de structures exotiques sur : Clifford Taubes montre même en 1987 qu'il en existe une infinité non dénombrable[10].Sous-variétés, plongements
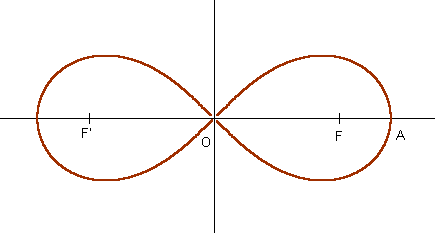
Article détaillé : plongement. La lemniscate n'est pas une sous-variété du plan, car elle a un point double. On peut la voir comme l'image d'un cercle par une immersion, mais pas un plongement.
La lemniscate n'est pas une sous-variété du plan, car elle a un point double. On peut la voir comme l'image d'un cercle par une immersion, mais pas un plongement.
La notion de sous-variété d'une variété différentielle M de dimension n est définie par lecture dans les cartes locales, en se ramenant à la configuration où l'on a un sous-espace vectoriel inclus dans
. Une partie N de M est une sous-variété de codimension d, si en chaque point x de N existe une carte locale  pour laquelle
pour laquelleLa partie N est alors naturellement munie d'une structure de variété de dimension n-d, induite par celle de M.
Ainsi, certaines courbes et surfaces classiques du plan ou de l'espace forment des sous-variétés, mais pas toutes, par exemple à cause de l'existence de points multiples. Si la courbe ou la surface est définie de façon paramétrique, on peut donner des conditions suffisantes sur l'application de paramétrage pour que l'image soit une sous-variété, ce qui conduit à la notion générale de plongement. On peut aussi donner des conditions pour qu'une courbe ou surface définie par une ou des équations soit une sous-variété. L'équivalence locale entre ces différents points de vue est donnée par le théorème des fonctions implicites.
De façon générale, un plongement permet d'inclure une variété dans une autre en respectant la structure différentielle. Une application p d'une variété X dans M est appelée plongement quand p est une immersion et un homéomorphisme sur son image Y=p(X). Dans ce cas, Y est une sous-variété de M. Le théorème de plongement de Whitney montre que toute variété différentielle peut être plongée dans un espace
 pour un p suffisamment grand, c'est-à-dire que toute variété peut-être vue comme sous-variété d'un tel espace vectoriel.
pour un p suffisamment grand, c'est-à-dire que toute variété peut-être vue comme sous-variété d'un tel espace vectoriel.On dispose d'une généralisation de la définition d'une sous-variété par équation. Si
est une submersion entre les variétés différentielles M et N, et si n appartient à N, alors l'image réciproque f − 1(n) est une sous-variété de codimension égale à la dimension de N.Notamment, les variétés de codimension 1 sont appelées hypersurfaces de M. Elles peuvent être obtenues, localement, comme images réciproques pour des fonctions numériques définies sur M et sans point critique.
Calcul différentiel sur une variété
Vecteurs tangents et différentielle d'une application
Article détaillé : fibré tangent.On peut définir de façon relativement simple la notion de vecteur tangent à une sous-variété de
, et cette définition donne des vecteurs de l'espace ambiant. Cependant, il est utile et important de disposer d'une construction qui ne fasse pas intervenir de plongement, mais qui soit valable au niveau des variétés abstraites.Un mode de définition possible est basé sur la relation de tangence entre les courbes. On peut, par lecture dans une carte locale, définir la notion de courbes tangentes en un point m de la variété M. Les vecteurs tangents en m à la variété sont alors les classes d'équivalence pour cette relation. Ils forment un espace vectoriel TmM qui a la même dimension n que M.
La réunion disjointe de tous les espaces tangents TmM pour m appartenant à M forme une variété TM de dimension 2n, appelée fibré tangent à la variété. L'espace TM possède une structure de fibré vectoriel de base M. Cependant cette construction engendre une perte de différentiabilité : si M est de classe Ck+1, le fibré tangent est de classe Ck.
On peut ensuite définir la différentielle d'une application différentiable f entre deux variétés M et N. On note m un point de M et n son image ; alors la différentielle Tmf de f au point m est une application linéaire de l'espace tangent TmM vers TnN. Pour la définir, on réintroduit les applications fφ,ψ représentant la fonction f lue dans des cartes locales, et on en prend la différentielle au point φ − 1(m) correspondant à m. Une nouvelle fois, l'objet ainsi construit est indépendant des cartes utilisées.
Fibrés associés
Opérateurs de calcul différentiel
Notes et références
Notes
- ↑ Cet ordre d'exposition, où l'on définit l'immersion avant la différentielle, peut par exemple être trouvé dans le livre Riemannian Geometry cité en référence.
- ↑ Hassler Whitney, Differentiable Manifolds, Annals of Mathematics, 37, 1936, p. 645-680
- ↑ John Milnor, On manifolds homeomorphic to the 7-sphere, Annals of Math. 64, 1956, p. 399-405
- ↑ M. Kervaire, A manifold which does not admit any differentiable structure, Comm. Math. Helv., 34, 1960, p. 257–270 consultable en ligne
- ↑ Pour la dimension 3, ce texte présente (page 8) la cascade de résultats (1934-1960) qui concourent à donner cette propriété
- ↑ Une partie de cette séquence est retracée dans le livre The Geometry of Four-Manifolds cité en référence, p. 28-30
- ↑ Michael Freedman, The topology of four-dimensional manifolds, Journal of Differential Geometry, 17, 1982, p. 357-454
- ↑ Simon Donaldson, Self-dual connections and the topology of smooth 4-manifolds., Bulletin Amer. Math. Soc. 8, 1983, p. 81-83, disponible en ligne
- ↑ Simon Donaldson, An application of gauge theory to four-dimensional topology, Journal of Differential Geometry, 18, 1983, p. 279-315
- ↑ Clifford Taubes, Gauge theory on asymptotically periodic 4-manifolds, Journal of Differential Geometry, 25, p. 363-430 (1987), voir résumé en ligne
Références
- Jacques Lafontaine , Introduction aux variétés différentielles [détail des éditions]
- Sylvestre Gallot, Dominique Hulin, Jacques Lafontaine ; Riemannian Geometry [détail des éditions]
- Morris W. Hirsch ; Differential Topology [détail des éditions]
- S. K. Donaldson, P. B. Kronheimer The Geometry of Four-Manifolds (Oxford Mathematical Monographs) ISBN 0-19-850269-9
 Portail des mathématiques
Portail des mathématiques
Catégories : Géométrie différentielle | Topologie différentielle


Wikimedia Foundation. 2010.