- Théorème de Poincaré-Bendixson
-
En mathématiques, le théorème de Poincaré-Bendixson est un résultat qualitatif sur les équations différentielles. Il concerne les équations du type (1) : x' = f(x) où f est une fonction continument dérivable, du plan réel dans lui-même et définie sur un ouvert Ω. Le théorème indique que si une solution maximale reste bornée, alors soit elle converge, soit son comportement asymptotique est celui d'une fonction périodique. Autrement dit, le plan est trop étroit pour admettre comme solutions d'équations de type (1), des trajectoires chaotiques.
Ce théorème est utilisé pour l'étude des systèmes dynamiques. Il assure que toute une classe d'équations, comme celle de Lotka-Volterra n'admet que des solutions simples (c'est-à-dire non chaotiques). En dimension deux, le chaos existe, mais pour l'obtenir il est plus simple de considérer une équation aux différences finies comme celle associée à la suite logistique. Ce résultat ne se généralise pas à la dimension trois, comme le montre le système dynamique de Lorenz. Ce résultat est aussi utile en topologie algébrique, il permet d'établir le théorème de la boule chevelue.
Ce théorème est énoncé par Henri Poincaré[1], la preuve est finalement complétée par Ivar Bendixson en 1901[2].
Sommaire
Énoncé
Dans le reste de l'article Ω désigne un ouvert de R2 et f un champ vectoriel défini sur Ω, à valeurs dans R2 et continument différentiable. L'équation différentielle autonome nommée (1) est la suivante :

La fonction s(t) est définie sur R et est une solution maximale de l'équation (1). Ici, le terme maximal[Note 1] signifie que la fonction s est définie sur un intervalle I et qu'il n'existe aucune fonction définie sur un intervalle J, confondue avec s sur I, telle que J contienne strictement I et qui soit solution de l'équation (1).
Théorème de Poincaré-Bendixson[3] — Si s est à valeurs dans un compact K inclus dans Ω, alors soit cette fonction converge vers une limite, soit son comportement asymptotique est une fonction périodique appelée cycle limite.
Approche intuitive
Signification du théorème
 Exemple de solution convergente de l'équation (1)
Exemple de solution convergente de l'équation (1)
L'équation étudiée possède plusieurs spécificités. Tout d'abord elle est à valeurs dans un plan, elle correspond à un système de deux équations différentielles d'ordre un. Ensuite, à chaque point de la trajectoire d'une solution x(t), l'équation donne la dérivée x'(t). Ici le terme de trajectoire d'un point p désigne l'image d'une courbe intégrale passant par p[4], ce terme est synonyme d'orbite de p[5]. Pour imaginer la solution, on peut considérer une étendue d'eau dont la surface est parcourue par un courant décrit par la fonction f. Cette situation est illustrée sur la figure de droite. Les vecteurs indiquent la direction et la force du courant. Une telle fonction f est appelée un champ vectoriel.
Une solution est une courbe dont la trajectoire (c'est-à-dire l'ensemble des points qui constituent l'ensemble d'arrivée de la solution) possède en chaque point p une tangente dirigée par le vecteur f(p) du champ vectoriel. La vitesse scalaire (c'est-à-dire la norme de la dérivée pour le produit scalaire canonique) est égale à la norme du vecteur f(p) en ce point de la trajectoire. Pour reprendre la comparaison précédente, on obtient une solution en plaçant un bouchon dans l'eau. Le mouvement du bouchon, c'est-à-dire sa trajectoire ainsi que sa vitesse scalaire en chaque point, est une solution de l'équation différentielle.
L'équation est dite autonome, cela signifie que le courant ne varie pas avec le temps. Cela signifie que si l'on souhaite simuler l'équation à l'aide du bouchon, on peut le lâcher à un point p0, voir son évolution pendant une durée t qui l'amène au point pt, retirer le bouchon pour « aller prendre un café »[6] et reposer le bouchon au point pt pour simuler la fin de la trajectoire du bouchon. La pause café ne modifie pas cette trajectoire car le courant est stable.
Le bouchon peut avoir plusieurs comportements, si le courant est à l'image de celui d'un fleuve il finit par beaucoup s'éloigner. Cette configuration n'est pas celle du théorème. On suppose que la trajectoire reste dans un espace borné, comme par exemple celui d'un étang agité par un courant régulier. Le théorème indique que le bouchon peut finir par s'arrêter, c'est-à-dire qu'il s'approche de plus en plus d'un point sans courant, à l'image de l'illustration de droite. Si ce n'est pas le cas, le bouchon est pris dans un tourbillon et tourne sans cesse et, une fois le système stabilisé, chaque tour du bouchon est identique au précédent.
Démonstration intuitive
 Si la trajectoire finit par toujours tourner dans le même sens, il est intuitif que la solution converge vers un cycle limite.
Si la trajectoire finit par toujours tourner dans le même sens, il est intuitif que la solution converge vers un cycle limite. Si la trajectoire ne finit pas par toujours tourner dans le même sens, elle fait des virages de plus en plus serrés. La continuité de la fonction f rend cette configuration impossible.
Si la trajectoire ne finit pas par toujours tourner dans le même sens, elle fait des virages de plus en plus serrés. La continuité de la fonction f rend cette configuration impossible.Pour se faire une idée intuitive de la démonstration, imaginons une solution s, qui ne converge pas et reste dans une zone bornée, à l'image de celle de frontière rouge sur la figure de gauche. L'intuition du bouchon se déplaçant à l'aide d'un courant montre que la solution ne s'arrête jamais. Autrement dit, si le bouchon est mis dans l'eau à l'instant t = 0, la solution s est définie sur R+.
Si la trajectoire se croise, c'est-à-dire s'il existe deux valeurs t1 et t1 + δ tels que le bouchon soit à la même position à ces deux instants. Comme la trajectoire du bouchon ne dépend que du courant, son mouvement à partir de t1 et à partir de t1 + δ est exactement la même et à l'instant t1 + 2.δ le bouchon se retrouve encore exactement au même endroit. Ce qui montre l'existence d'un cycle limite, atteint exactement au moins à partir de l'instant t1.
Supposons maintenant que la trajectoire ne se croise jamais. On peut supposer qu'à partir d'un certain temps, la trajectoire est toujours parcourue dans le même sens de rotation, à l'image de la figure de gauche. Supposons de plus qu'elle s'enroule sur l'extérieur et chaque presque tour elle est un peu plus proche de la frontière en rouge. La trajectoire est de plus en plus coincée entre la frontière rouge et la boucle précédente. L'intuition indique qu'elle finit par converger vers un lacet simple, c'est-à-dire boucle sans point double. Plus la solution s voit sa trajectoire se rapprocher de cette boucle, plus sa vitesse est proche de celle qu'elle aurait si la trajectoire était exactement sur la boucle, car le courant (autrement dit la fonction f définissant l'équation) est continu. Le cycle limite est donc un peu intuitif dans ce cas là. Le même raisonnement s'applique si la solution s'enroule sur l'intérieur et non plus à l'extérieur.
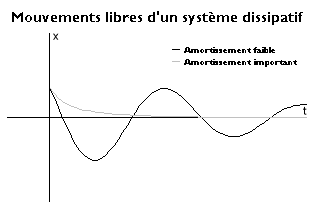
Pour ne pas posséder de cycle limite, il semble nécessaire que la trajectoire change une infinité de fois de sens de rotation. En effet, s'il n'y avait qu'un nombre fini de modification de ce sens, à partir d'une certaine valeur de t, la trajectoire serait revenue à la situation précédentes. Ces changements de rotations sont illustrés sur la figure de droite. Comme la courbe est coincée dans une zone bornée et qu'elle ne peut pas se croiser, les virages imposés par l'infinité de modification du sens de rotation sont nécessairement de plus en plus serrés. Ils finissent même par être plus serrés que n'importe quelle valeur que l'on peut imposer, ce qui intuitivement signifie qu'il existe au moins un point où le courant n'est pas continu et ce qui est contraire aux hypothèses du théorème.
Exemples
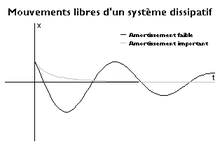 Un système oscillant à un degré de liberté tend vers un point d'équilibre si l'amortissement n'est pas nul.
Un système oscillant à un degré de liberté tend vers un point d'équilibre si l'amortissement n'est pas nul.Un oscillateur harmonique est régi par l'équation différentielle suivante[7], si M, B et K sont des constantes réelles (M et K sont strictement positifs et B est négatif ou nul) :

Ce système n'est pas exactement de la forme indiquée précédemment, mais si l'on choisit pour variable dépendant du temps non plus uniquement la fonction réelle x mais le couple (x, v), où v désigne la vitesse du système, on obtient :

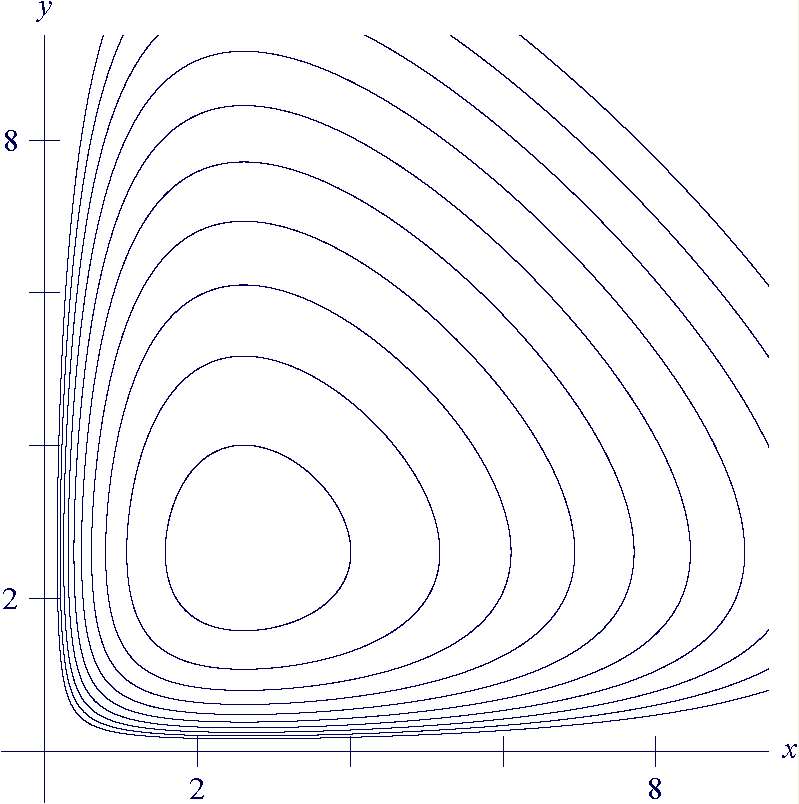
 L'équation de Lotka-Volterra a pour solution des cycles, corroborant par là le théorème de l'article.
L'équation de Lotka-Volterra a pour solution des cycles, corroborant par là le théorème de l'article.Ce système vérifie les hypothèses du théorème de Poincaré-Bendixson. Des considérations d'énergie montrent en effet que x et v sont nécessairement bornés. Si B, correspondant au coefficient d'amortissement, est nul on trouve une solution périodique de trajectoire une ellipse, dans l'espace des phases. C'est-à-dire que le couple (x, v) décrit une ellipse. Si B n'est pas nul, on trouve une trajectoire qui se stabilise, la valeur x tend vers le point d'équilibre, illustré sur la figure de gauche, et v tend vers le vecteur nul.
L'exemple précédent est particulièrement simple car linéaire et à coefficients constants. L'équation de Lotka-Volterra est à cet égard un peu plus complexe, car non linéaire. Elle correspond à une modélisation d'un système proie-prédateur, par exemple le couple lièvre-lynx dans la baie d'Hudson[8]. Si les lynx sont nombreux, la population de lièvres finit par décroître suffisamment pour qu'à leur tour les lynx diminuent en nombres, ce qui engendre un nouveau développement des lièvres. Si x désigne l'effectif des proies, y celui des prédateurs et les lettres grecs des paramètres, l'équation s'écrit sous forme du système :

Une fois encore, les valeurs de x et de y sont nécessairement bornées, si le nombre de lièvres augmente trop, les lynx se multiplient et la population diminue à nouveau. De même, si les lynx augmentent en trop grand nombre, les lièvres se raréfient. Cette situation n'aboutit pas toujours à un équilibre stable. Dans le cas général, on obtient des cycles à l'image de la figure de droite. En revanche, le théorème de Poincaré-Bendixson garantit que le chaos ne peut provenir d'une telle dynamique.
Contre exemples
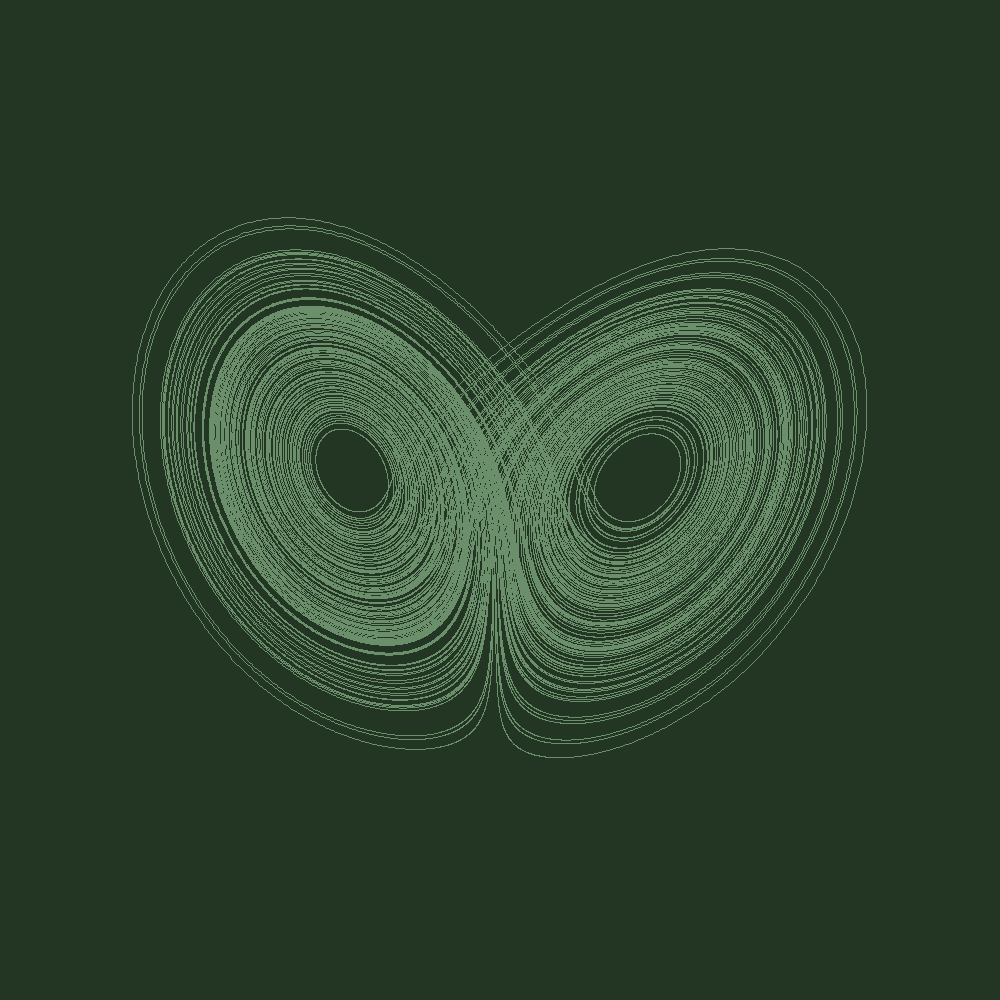
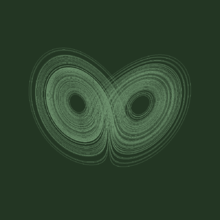 En dimension trois, le théorème de l'article ne s'applique plus. Le système dynamique de Lorenz est un contre exemple.
En dimension trois, le théorème de l'article ne s'applique plus. Le système dynamique de Lorenz est un contre exemple.On trouve un premier exemple relativement proche de l'équation de Lotka-Voltera. Le facteur limitant de la population étudiée n'est pas nécessairement un prédateur, mais peut-être la population elle-même qui, si elle augmente, finit par épuiser les réserves disponibles. Un siècle avant Lotka et Voltera, Verhulst avait modélisé l'évolution de la population par l'équation différentielle suivante[9], dont la solution est appelée fonction logistique :

En elle-même, cette équation n'est pas un contre-exemple. Cependant cette équation a son équivalent avec une suite récurrente dite logistique. Elle est adaptée pour modéliser les « populations dont les générations ne se chevauchent pas »[10]. Les arguments utilisés pour la preuve intuitive du théorème ne s'appliquent pas à une équation aux différences finies. Pour cette raison, un résultat analogue à celui du théorème de l'article n'est pas vérifié. A la différence de la fonction logistique, toujours convergente, le comportement limite de la suite logistique se présente globalement sous trois aspects, convergence, existence d'un cycle limite, mais la situation chaotique existe aussi[11].
Il est aussi possible de construire un contre exemple en modifiant la dimension de l'espace des phases. La démonstration intuitive montre que si, au bout d'un certain temps, la trajectoire tourne toujours dans le même sens, elle se trouve coincée dans un espace de plus en plus réduit. En dimension 3, ce résultat n'est pas vrai, la trajectoire peut toujours passer au-dessus ou par en dessous. Ce comportement se produit pour le système dynamique de Lorenz, dont l'espace des phases est de dimension trois. Le comportement limite de la trajectoire est illustré à droite. La troisième dimension rend possible une double boucle, avec une trajectoire passant de l'une à l'autre. Ce comportement n'est ni convergent ni asymptotique à une fonction périodique[12].
Préliminaires
La démonstration en elle même du théorème est relativement simple, elle utilise en revanche une machinerie[13] un peu lourde. Elle joue un rôle majeur dans l'analyse des systèmes dynamiques.
Théorème de Cauchy-Lipschitz
Article détaillé : Théorème de Cauchy-Lipschitz.Le théorème de Cauchy-Lipschitz garantit l'existence et l'unicité d'une solution maximale vérifiant une condition initiale. Sous réserve d'une régularité suffisante de la fonction f, il montre l'existence de deux propriétés vérifiées par toute une fonction s satisfaisant aux hypothèses du théorème :
-
- Une solution maximale s(t) vérifiant les hypothèses du théorème de Poincaré-Bendixson possède comme domaine de définition l'ensemble R tout entier.
Ce résultat permet d'assurer un véritable sens aux mots comportement asymptotique appliqués à s, il est en effet possible de parler de la limite de s(t) quand t tend vers l'infini. Le deuxième résultat permet de conclure sur ce comportement si s contient un point double.
-
- Une fonction s(t) vérifiant les hypothèses du théorème de Poincaré-Bendixson et possédant un point double est périodique.
Ces deux propositions correspondent à deux assertions intuitives. Tout d'abord, on peut laisser indéfiniment le bouchon dans l'étang, rien n'arrêtera sa trajectoire. En fait, les seules choses qui pourraient l'arrêter est le fait d'être bloqué le bord de l'étang (une autre logique explique alors sa trajectoire), ou que le courant soit de plus en plus violent, à tel point que le bouchon se trouve infiniment loin en un temps fini. Ces deux configurations sont impossibles dans le cadre du théorème. La deuxième assertion est que, si le bouchon revient à un point par lequel il est déjà passé, il parcourt indéfiniment la même trajectoire.
DémonstrationsL'équation (1) vérifie les conditions du théorème de Cauchy-Lipschitz. En effet, la fonction différentielle df est continue, elle admet un majorant, noté ici k, de sa norme[Note 2], sur le compact K, car elle est continue et toute fonction continue, définie sur un compact est bornée (si l'ensemble d'arrivé est un espace métrique). Le théorème des accroissements finis montre que la fonction f est k-lipschitzienne, ce qui montre que les hypothèses de théorème de Cauchy-Lipschitz sont bien respectées.
-
- Une fonction s(t) vérifiant les hypothèses du théorème de Poincaré-Bendixson possède comme domaine de définition l'ensemble R tout entier :
Soit I de domaine de définition de s, le théorème de Cauchy-Lipschitz montre que I est un intervalle ouvert non vide de R. La fonction s est uniformément continue sur I, on peut donc prolonger cette fonction sur l'adhérence de I, ce prolongement est encore une solution de l'équation différentielle. Comme cet adhérence contient I, et que s est une solution maximale, l'intervalle contient son adhérence, autrement dit il est fermé.
Le seul ouvert, fermé non vide de R est R tout entier car R est connexe, ce qui montre que le domaine de définition de s est égal à R tout entier.
-
- Une fonction s(t) vérifiant les hypothèses du théorème de Poincaré-Bendixson et possédant un point double est périodique :
Supposons qu'il existe deux nombres réels τ et δ > 0 tel que s(τ) = s(τ + δ). Considérons la solution maximale de l'équation (1) avec la condition de Cauchy x(τ) = s(τ). Elle admet deux solutions maximales, la fonction s et la fonction qui à t associe s(t + δ). Le théorème de Cauchy-Lipschitz garantit l'existence d'une unique solution. Ces deux solutions sont donc égales, ce qui montre la périodicité de s.
Flot
Si x est un point de la trajectoire bleue, l'ensemble ω-limite ω(x) correspond à la zone rouge. Soit aucun point de l'ensemble ω-limite n'appartient à la trajectoire, soit ils appartiennent tous.Une manière d'étudier l'équation différentielle (1) est de considérer son flot[Note 1], c'est la fonction φ qui, à un instant t et à un point x de Ω associe le point de Ω, noté φt(x), correspondant à l'image de t par la courbe intégrale s vérifiant la condition de Cauchy s(0) = x. La fonction x → φt(x) est celle qui indique ce qu'est devenu chaque point de Ω, au bout d'un laps de temps t, et la fonction t → φt(x) est la courbe intégrale vérifiant la condition de Cauchy s(0) = x.
Dans le cas particulier du théorème de l'article, la fonction φ est définie pour toute valeur de R sur la zone qui nous intéresse. D'après le paragraphe précédent, elle vérifie de plus, φs(φt(x)) = φs+t(x) ou encore φsoφt = φs+t, ce qui lui confère une structure de groupe.
Certains sous-ensembles de Ω jouent un rôle particulier. On appelle ensemble invariant par le flot φt un ensemble S de Ω tel que pour tout t élément de R, φt(S) soit inclus dans S[14]. Un cas particulier d'ensemble invariant par le flot est l'orbite ou encore la trajectoire d'un point x de Ω, c'est-à-dire l'image d'une courbe intégrale maximale passant par x. Dans le contexte du théorème, l'ensemble invariant qui nous intéresse est un peu différent, il permet d'étudier le comportement asymptotique d'une courbe intégrale[15].
- Soit x un point de Ω dont la courbe intégrale maximale est définie sur R. L'ensemble ω-limite[15] de x, noté ω(x) est l'intersection des adhérences des sections finissantes de l'image de la courbe intégrale maximale vérifiant la condition de Cauchy s(0) = x.

Autrement si un point y de Ω est élément de ω(x), lorsqu'il existe une suite réelle croissante (tn) qui tend vers plus l'infini telle que φtn(x) admette pour limite y.
L'ensemble ω(x) possède certaines propriétés :
-
- Si t est un nombre réel, alors ω(x) = ω(φt(x)) et ω(x) et un ensemble invariant par le flot φt. En particulier, si y est un élément de ω(x), une courbe intégrale passant par y possède une image incluse dans ω(x). Si la trajectoire de x est à valeurs dans un compact K, ω(x) est un connexe compact non vide[16].
La suite de l'article montre que comprendre le comportement asymptotique de x revient à comprendre le comportement de la courbe intégrale de y, si y est un point de ω(x).
Démonstration-
- Si t est un nombre réel, alors ω(x) = ω(φt(x)) :
Cette proposition est simple à démontrer, il suffit de comparer les définitions des deux ensembles :

-
- ω(x) est invariant par l'action du flot φt :
Cette propriété est encore intuitive, soit y un élément de ω(x), il existe une suite réelle croissante (tn), de limite plus l'infini, tel que la suite (φtn(x)) admette pour limite y. La fonction φ de RxK dans K est une fonction continue[Note 1], donc la suite (φt(φtn(x))) admet pour limite φt(y). La structure du groupe du flot montre que la suite s'écrit encore (φt+tn(x)) et la suite (t + tn) est bien une suite croissante de limite plus l'infini.
-
- ω(x) est un compact non vide :
Montrons dans un premier temps que ω(x) est non vide. Soit on considère la suite (φn(x)), c'est une suite à valeurs dans le compact K. Le théorème de Bolzano-Weierstrass indique que l'on peut en extraite une suite (φtn(x)) convergente. Sa limite est par définition dans ω(x).
L'ensemble ω(x) est défini comme une intersection de fermé, c'est un fermé. Il prend ses valeurs dans le compact K, il est donc borné. Dans le plan, tout fermé borné est compact.
-
- ω(x) est un connexe :

Cette proposition n'est pas nécessairement vraie si ω(x) n'est pas compact. La raison est illustrée sur la figure de droite. Si la trajectoire est une spirale aplatie, dont les côtés s'éloignent à l'infini, l'ensemble ω-limite se réduit à deux droites, illustrés en rouge. Il n'est donc pas connexe.
On suppose ici que ω(x) est non connexe. On va montrer qu'il ne peut être compact. Par contraposé, on obtient la démonstration. On note En l'adhérence de l'image de l'intervalle d'extrémités n et l'infini, par la courbe intégrale. Par définition, l'intersection des En est égal à ω(x) et les En forment une suite de fermés emboités. Par hypothèse, ω(x) n'est pas connexe et il existe deux ouverts disjoints et non vides dont l'union est égale à ω(x). Soit O l'union de ces deux ouverts. Le complémentaire de O dans En, noté Fn est un fermé non vide car En est connexe (il est défini comme l'adhérence d'un connexe). La suite Fn est une suite de fermés emboités dont l'intersection est vide alors qu'aucun d'eux ne l'est. Aucun compact ne peut contenir une telle suite, ce qui termine la démonstration.
Annexes
Notes
- Voir l'article Théorème de Cauchy-Lipschitz
- On choisit pour norme celle de la borne supérieure sur la boule unité, notée ici B :

Références
- H. Poincaré, Sur les courbes définies par une équations différentielle Œuvre Vol 1 Paris (1892)
- I. Bendixson, Sur les courbes définies par des équations différentielles, Acta Mathematica vol. 24 (1901)
- R. Kollár The Poincaré-Bendixon theorem University of Michigan
- Cette définition est celle de : S. Cantat Théorème de Poincaré-Bendixson École Normale Supérieure de Lyon Le journal de maths des élèves, Volume 1 (1995), No. 3
- T. Sari Introduction aux systèmes dynamiques et applications à un modèle cosmologique École normale supérieure de Lyon p 259
- Cette analogie provient du site : S. Cantat Théorème de Poincaré-Bendixson École Normale Supérieure de Lyon Le journal de maths des élèves, Volume 1 (1995), No. 3
- voir par exemple : J. Carbonnet M. Roques Oscillateur mécanique Académie de Nancy-Metz
- E. R. Leigh The ecological role of Volterra's equations Gerstenhaber (American Mathematical Society, Providence) (1969)
- J.S. Cramer The origins and development of the logit model (2003) version mise à jour du livre : Logit Models from Economics and Other Fields Cambridge University Press
- Cette expression provient de : D. Perrin La suite logistique et le chaos Université Paris Sud 11 Orsay p 5
- Un cas particulier chaotique est étudié dans : D. Perrin La suite logistique et le chaos Université Paris Sud 11 Orsay p 28
- (en) Edward N. Lorenz, « Deterministic Nonperiodic Flow », dans J. Atmos. Sci., vol. 20, 1963, p. 130-141 [texte intégral, lien DOI (pages consultées le 4 octobre 2010)]
- Ce terme provient du site : S. Cantat Théorème de Poincaré-Bendixson École Normale Supérieure de Lyon Le journal de maths des élèves, Volume 1 (1995), No. 3 p 145
- T. Sari Introduction aux systèmes dynamiques et applications à un modèle cosmologique École normale supérieure de Lyon p 263
- Pour une définition, voir par 264 : T. Sari Introduction aux systèmes dynamiques et applications à un modèle cosmologique École normale supérieure de Lyon p 263
- Ces propriétés sont extraites de : S. Cantat Théorème de Poincaré-Bendixson École Normale Supérieure de Lyon Le journal de maths des élèves, Volume 1 (1995), No. 3
Catégories :- Systèmes dynamiques
- Équation différentielle
- Théorème d'analyse
-
Wikimedia Foundation. 2010.