- RADAR
-
Radar
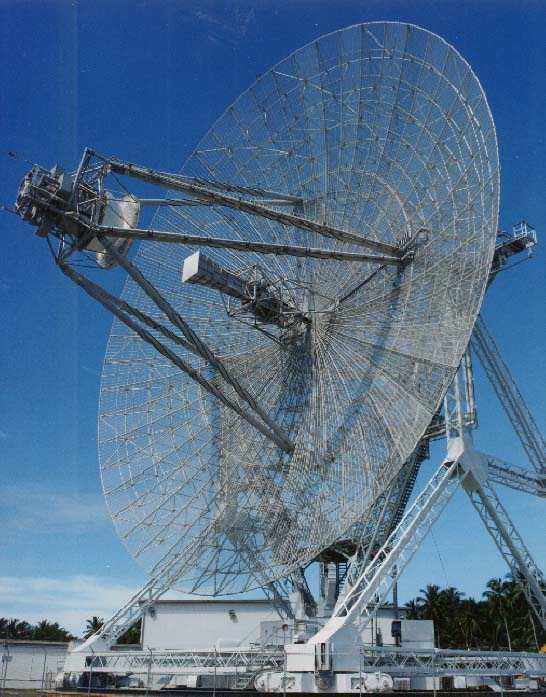
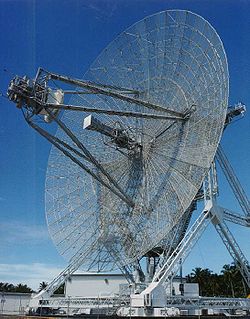 Cette antenne radar longue portée, connue sous le nom ALTAIR, est utilisée pour détecter et pister les objets spatiaux en conjonction avec le système anti-missiles balistiques sur le site Ronald Reagan Test Site localisé principalement sur l'atoll Kwajalein des Îles Marshall
Cette antenne radar longue portée, connue sous le nom ALTAIR, est utilisée pour détecter et pister les objets spatiaux en conjonction avec le système anti-missiles balistiques sur le site Ronald Reagan Test Site localisé principalement sur l'atoll Kwajalein des Îles Marshall
Le radar est un système qui utilise les ondes radio pour détecter et déterminer la distance et/ou la vitesse d'objets tels que les avions, bateaux, ou encore la pluie. Un émetteur envoie des ondes radio, qui sont réfléchies par la cible et détectées par un récepteur, souvent situé au même endroit que l'émetteur. La position est estimée grâce au temps de retour du signal et la vitesse est mesurée à partir du changement de fréquence du signal par effet Doppler.
Le radar est utilisé dans de nombreux contextes : en météorologie, pour le contrôle du trafic aérien, pour la surveillance du trafic routier, par les militaires, en astronautique, etc. Le mot lui-même est un néologisme provenant de l'acronyme anglais : RAdio Detection And Ranging, que l'on peut traduire par « détection et estimation de la distance par ondes radio », « détection et télémétrie radio », ou plus simplement « radiorepérage ».
Cet acronyme d'origine américaine a remplacé le sigle anglais précédemment utilisé : "RDF" (Radio Direction Finding). Depuis, le mot est entré dans la langue usuelle, perdant donc son écriture de sigle. Le mot "radar" est un acronyme mais aussi un palindrome.
Sommaire
- 1 Histoire
- 2 Description générale
- 3 Technologie du radar
- 4 Les principes de fonctionnement
- 5 Traitement des signaux radar
- 6 Applications
- 7 Voir aussi
- 8 Notes
- 9 Bibliographie
- 10 Source
Histoire
En 1864, James Clerk Maxwell décrit les lois de l’électromagnétisme, ce qui permet pour la première fois de travailler sur leur source. En 1888, Heinrich Rudolf Hertz montre que les ondes électromagnétiques sont réfléchies par les surfaces métalliques. Au début du XXe siècle, le développement de la radio et de la TSF (par Marconi, entre autres), permet de développer les antennes nécessaires à l'utilisation du radar.
Plusieurs inventeurs, scientifiques, et ingénieurs ont contribué ensuite au développement du concept du radar. Les fondements théoriques datent de 1904 avec le dépôt du brevet du « Telemobiloskop » (Reichspatent Nr. 165546) par l'allemand Christian Hülsmeyer[1]. Celui-ci a démontré la possibilité de détecter la présence de bateaux dans un brouillard très dense. En envoyant une onde à l'aide d'une antenne multipolaire, son système notait le retour depuis un obstacle avec une antenne dipolaire sans pouvoir cependant en définir plus qu'un azimut approximatif et aucunement sa distance. C'était donc le RAD (radio détection) mais pas le AR (azimut et rayon).
Il faut ensuite résoudre les problèmes de longueur d’onde et de puissance soulevés en 1917 par Nikola Tesla[2]. Durant les années 1920, on commence donc les expériences de détection avec des antennes. En 1934, faisant suite à une étude systématique du magnétron, des essais sur des systèmes de détection par ondes courtes sont menés en France par la CSF (16 et 80 cm de longueur d'onde) selon les principes de Tesla. Un brevet est déposé ([brevet français n° 788795][3]). C'est ainsi que naissent les « radars » à ondes décimétriques. Le premier équipa en 1934 le cargo Orégon, suivi en 1935 par celui du paquebot Normandie[4].
En 1935, faisant suite à un brevet déposé par Robert Watson-Watt (l’inventeur dit « officiel » du radar) (brevet anglais GB593017 [3],[5],[6]), le premier réseau de radars est commandé par les Britanniques et portera le nom de code Chain home. Le Hongrois Zoltán Lajos Bay[7] a produit un autre des premiers modèles opérationnels en 1936 dans le laboratoire de la compagnie Tungsram (Hongrie). L’Allemagne nazie et les Américains ont également poursuivi des recherches dans ce domaine.
De manière générale, on peut considérer que le radar était quasiment prêt dans sa forme actuelle à l'aube de la Seconde Guerre mondiale. Il manquait cependant l'expérience opérationnelle au combat qui a poussé les ingénieurs à trouver de nombreuses améliorations techniques. Ainsi, les radars aéroportés ont été développés pour donner la possibilité à l'arme aérienne de procéder aux bombardements et à la chasse de nuit. On mena également des expériences sur la polarisation.
Lors de l'utilisation du radar de manière opérationnelle, les opérateurs ont constaté la présence d'artéfacts. Par exemple, les opérateurs des radars micro-ondes des armées alliées remarquèrent du bruit dans les images. Ces bruits s'avérèrent être des échos venant de précipitations (pluie, neige, etc.), ce qui a mené au développement des radars météorologiques après la fin des combats. Sont également mis au point les premières techniques de brouillage et de contre-mesures électroniques.
Depuis cette guerre, les radars sont utilisés dans de nombreux domaines allant de la météorologie à l'astrométrie en passant par le contrôle routier et aérien. Dans les années 1950, l'invention du radar à synthèse d'ouverture a pavé la voie vers l'obtention d'images radar à très haute résolution. En 1965, Cooley et Tuckey (re)découvrent la transformée de Fourier rapide qui a pris tout son intérêt surtout lorsque l'informatique a commencé à devenir suffisamment puissante. Cet algorithme mathématique est à la base de la plupart des traitements radar numériques utilisés aujourd'hui.
Description générale
 Principe du sondage radar
Principe du sondage radarUn radar émet de puissantes ondes, produites par un oscillateur radio et transmises par une antenne. Bien que la puissance des ondes émises soit grande, l’amplitude du signal renvoyé est le plus souvent très petite. Néanmoins, les signaux radio sont facilement détectables électroniquement et peuvent être amplifiés de nombreuses fois. Il existe différentes façons d'émettre ces ondes. Les plus utilisées sont:
- Les ondes pulsées, où le radar émet une impulsion et attend le retour.
- Le radar à émission continue, où l'on émet continuellement à partir d'une antenne et on reçoit à l'aide d'une seconde.
En analysant le signal réfléchi, il est possible de localiser et d’identifier l’objet responsable de la réflexion, ainsi que de calculer sa vitesse de déplacement grâce à l'effet Doppler. Le radar peut détecter des objets ayant une large gamme de propriétés réflectives, alors que les autres types de signaux, tels que le son ou la lumière visible, revenant de ces objets, seraient trop faibles pour être détectés. De plus, les ondes radio peuvent se propager avec une faible atténuation à travers l'air et divers obstacles, tels les nuages, le brouillard ou la fumée, qui absorbent rapidement un signal lumineux. Cela rend possible la détection et le pistage dans des conditions qui paralysent les autres technologies.
Technologie du radar
Composantes d'un système radar
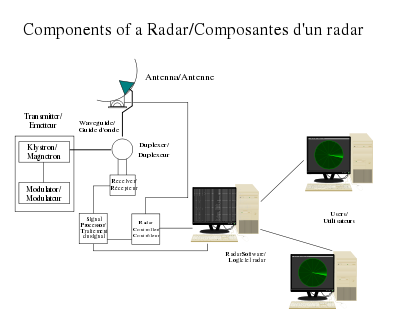 Composantes d'un radar (ici, un radar monostatique)
Composantes d'un radar (ici, un radar monostatique)Un radar est formé de différentes composantes:
- L'émetteur qui génère l'onde radio.
- Sur les radars à hyperfréquences (fréquences supérieures au gigahertz), c'est un guide d'onde qui amène l'onde vers l'antenne.
- Le duplexeur, un commutateur électronique, dirige l'onde vers l'antenne lors de l'émission ou le signal de retour depuis l'antenne vers le récepteur lors de la réception quand on utilise un radar monostatique. Il permet donc d'utiliser la même antenne pour les deux fonctions. Il est primordial qu'il soit bien synchronisé, puisque la puissance du signal émis est de l'ordre du mega-watt ce qui est trop important pour le récepteur qui, lui, traite des signaux d'une puissance de l'ordre de quelques nano-watts. Au cas où l'impulsion émise serait dirigée vers le récepteur, celui-ci serait instantanément détruit.
- L'antenne dont le rôle est de diffuser l'onde électromagnétique vers la cible avec le minimum de perte. Sa vitesse de déplacement, rotation et/ou balancement, ainsi que sa position, en élévation comme en azimut, sont asservies, soit mécaniquement, mais parfois aussi électroniquement (voir l'article Antenne réseau à commande de phase). L'antenne est sollicitée tant en émission qu'en réception. Ces deux fonctions peuvent être cependant séparées entre deux antennes dans le cas de radars multistatiques.
- Le récepteur qui reçoit le signal incident (cible - antenne - guide d'ondes - duplexeur), le fait émerger des bruits radios parasites, l'amplifie, le traite;
- Un étage de traitement de signal permettant de traiter le signal brut afin d'en extraire des données utiles à l'opérateur (détection, suivi et identification de cible; extraction de paramètres météorologiques, océanographiques, etc.). Le tout est contrôlé par le système électronique du radar, programmé selon un logiciel de sondage. Les données obtenues sont alors affichées aux utilisateurs.
Radar monostatique, bistatique, multistatique
Dans la plupart des cas, l'émetteur et le récepteur du radar partagent une électronique et une antenne commune. On parle alors de radar monostatique. Rien n'empêche cependant de considérer un système radar où l'émetteur et le récepteur sont séparés; on parle alors de radar bistatique, ou même de configuration multistatique, si l'on a un émetteur et plusieurs récepteurs distincts. L'une et l'autre configuration offrent des avantages et des inconvénients:
- dans une configuration monostatique, le partage de l'électronique et de l'antenne permet de réduire l'encombrement et les coûts de synchronisation entre l'émetteur et le récepteur, ce qui explique pourquoi l'immense majorité des radars sont monostatiques. En contrepartie, seul le signal rétrodiffusé par la cible est reçu par le radar. D'autre part, dans un contexte militaire, l'émetteur peut être détecté par l'ennemi et détruit...
- dans une configuration bistatique, le récepteur est distinct de l'émetteur et est totalement passif, donc moins facilement détectable par un ennemi potentiel. En plus d'émetteurs radar spécialisés, il est également envisagé d'utiliser des émetteurs dits d'opportunité comme des antennes-relais GSM, ou de télévision, ou des satellites GPS dont le signal est détourné de leur utilisation primaire pour effectuer à moindres frais et de manière discrète un travail de mesure habituellement laissé aux radars. Enfin, la possibilité de positionner l'émetteur et le récepteur à volonté permet d'explorer d'autres configurations de réflexion permettant d'augmenter le volume d'informations disponibles sur la cible. En contrepartie, l'utilisation d'une configuration bistatique demande une bonne synchronisation entre l'émetteur et le récepteur, et l'utilisation d'une géométrie d'acquisition moins triviale. Le radar basses fréquences de Jindalee, en Australie, est un exemple de radar bistatique opérationnel.
Lorsque l'on parle de radar bistatique, on suppose implicitement que l'émetteur et le récepteur sont réellement séparés (soit du point de vue de la distance, soit d'un point de vue angulaire). Si l'émetteur et le récepteur sont distincts physiquement (antennes différentes) mais situés presque au même endroit, le signal reçu est qualitativement proche d'un signal monostatique. On parle ainsi de configurations fortement bistatiques ou faiblement bistatiques pour intégrer ces deux possibilités.
Génération de l'onde
L'émetteur au site du radar comprend: un oscillateur permanent, un amplificateur et un modulateur. Pour les radars à hyperfréquences, qui forment l'immense majorité des radars en service, la génération d'impulsions courtes et très énergétiques demande une technologie qui est différente de celle, disons, d'un émetteur radio utilisé en télécommunications. Ainsi, la génération de l'onde se fait de la manière suivante:
- L'oscillateur permanent basé sur la technologie des tubes à cavité résonnante, il peut être un klystron qui a une fréquence très stable, un magnétron dont la fréquence varie dans le temps, ou d'autres types d'oscillateurs à état solide.
- Les générateurs d'impulsion, ou modulateurs, sont des pièces électroniques qui produisent l'impulsion radar à partir de l'onde continue produite par l'oscillateur. En quelque sorte, ils laissent passer l'onde vers l'amplificateur durant un très court laps de temps (de l'ordre de la µ seconde). Ceci permet de concentrer l'énergie de l'onde dans cette impulsion (puissance de l'ordre du M Watt). Il existe différentes sortes de commutateurs dont le plus connu est le thyratron. Le klystron peut lui-même remplir les rôles d'oscillateur, de générateur d'impulsion et d'amplificateur.
- Une fois que l'onde est produite, le guide d'onde est chargé de l'amener vers l'antenne avec une perte du signal la plus faible possible.
Plages de fréquences utilisées en radar
Généralités
La fréquence est principalement choisie en fonction de l'application visée. De manière générale, une grande longueur d'onde (bandes HF) permettra de profiter des phénomènes de propagation et de rebond sur l'ionosphère, ce qui permet de porter à des milliers de kilomètres (cas des radar trans-horizon). D'autre part, seuls les objets dont la taille typique est au moins de l'ordre de grandeur de la longueur d'onde sont visibles. Par exemple, une forêt sera partiellement transparente pour les grandes longueurs d'ondes (seuls les troncs d'arbres sont visibles); tandis que la forêt sera opaque en bande X (seule la canopée sera visible), car la longueur d'onde est de l'ordre de la taille des feuilles et des branches. La taille de l'antenne influe également sur la longueur d'onde à utiliser (et réciproquement).
Les bandes de fréquences civiles et militaires sont allouées de manière internationale au sein de la Conférence Mondiale des Radiocommunications réunie tous les trois ans au sein de l'Union Internationale des Télécommunications (prochaine conférence en 2010), avec également la participation d'organismes internationaux comme l'OTAN. Les demandes de bande doivent être déposées longtemps à l'avance dans la mesure où les ordres du jour des conférences sont généralement fixées plusieurs années à l'avance. D'autre part, au sein d'un pays, les institutions régaliennes peuvent s'arroger des bandes de fréquence pour l'utilisation exclusive des forces militaires ou de police. Toutefois, ces institutions subissent des pressions de plus en plus importantes de la part des industriels dans la mesure où les nouvelles technologies civiles (GSM, Wi-Fi, etc) ont une occupation spectrale grandissante, mais offrant un profit financier très large. L'heure est donc à la coopération entre les différents acteurs et à une cohabitation (pas toujours très réussie) de manière à limiter les brouillages entre les différentes applications. Toujours est-il que la bande de fréquence la plus adaptée d'un point de vue applicatif n'est pas toujours disponible et qu'il faut souvent trouver un compromis.
Noms des bandes de fréquence utilisées en radar
Le nom des plages de fréquences utilisées dans le monde des radars provient de la Seconde Guerre mondiale. En effet, pour garder secret le développement de ce système, les militaires ont décidé de donner à ces plages des noms de code qui sont demeurés en usage depuis. Ils ont été adoptés aux États-Unis par le Institute of electrical and electronics engineers (IEEE) et internationalement par l’Union internationale des télécommunications. Cependant, certains utilisateurs des bandes radios, comme les télédiffuseurs et l’industrie des contre-mesures militaires, ont remplacé les vocables traditionnels par leur propre identification.
Plages de fréquences radar Nom de bande Plage de fréquences Longueurs d’onde Commentaires HF 3-30 MHz 10-100 m Pour high frequency (haute fréquence). Utilisée par les radars côtiers et les radars “au-delà de l’horizon”. P < 300 MHz 1 m+ Pour précédent : appliquée a posteriori aux radars primitifs VHF 50-330 MHz 0.9-6 m Pour very high frequency (très haute fréquence). Utilisée par les radars à très longue portée et par ceux à pénétration de sol. UHF 300-1000 MHz 0.3-1 m Pour ultra high frequency (ultra haute fréquence). Radars à très longue portée (ex. détection de missiles balistiques), pénétration de sol et de feuillage. L 1-2 GHz 15-30 cm Pour long. Utilisée pour le contrôle aérien de longue portée et la surveillance aérienne, le GPS (et donc les radars passifs se basant dessus). S 2-4 GHz 7.5-15 cm Pour short (court). Utilisée par les radars de trafic aérien local, les radars météorologiques et navals. C 4-8 GHz 3.75-7.5 cm Compromis entre les bandes S et X pour les transpondeurs satellitaires et les radars météorologiques. X 8-12 GHz 2.5-3.75 cm Pour les radars météorologiques, les autodirecteurs de missiles, les radars de navigation, les radars à résolution moyenne de cartographie et la surveillance au sol des aéroports. Ku 12-18 GHz 1,67-2,5 cm Fréquence juste sous K (indice 'u' pour under en anglais) pour les radars de cartographie à haute résolution et l'altimétrie satellitaire. K 18-27 GHz 1,11-1,67 cm De l’Allemand kurz(court). Très absorbées par la vapeur d’eau, Ku et Ka sont utilisées pour la détection des gouttelettes de nuages en météorologie et dans les radars routiers (24.150 ± 0.100 GHz) manuels. Ka 27-40 GHz 0.75-1.11 cm Fréquence juste au-dessus de K (indice 'a' pour "above" en anglais) pour la cartographie, la courte portée, la surveillance au sol des aéroports, les radars routiers (34.300 ± 0.100 GHz) automatisés, et les radars anti-collision montés sur les voitures haut de gamme. mm 40-300 GHz 1 - 7,5 mm Bande millimétrique subdivisée en quatre parties : Q 40-60 GHz 5 mm - 7,5 mm Utilisée pour les communications militaires. V 50-75 GHz 6.0 - 4 mm Très fortement absorbée par l'atmosphère. E 60-90 GHz 6.0 - 3,33 mm W 75-110 GHz 2.7 - 4.0 mm Utilisée comme radar anti-collisions automobile et pour l'observation météorologique à haute résolution et de courte portée. Les antennes
 Radars de La Dôle
Radars de La DôleEn toute généralité, une antenne (radio ou radar) peut être vue comme un transducteur:
- d'une part, utilisée en émission, l'antenne sert à convertir une énergie électrique qui règne à la surface du fil ou du plan de l'antenne, en une onde électromagnétique qui va se propager dans l'espace.
- d'autre part, utilisée en réception, l'antenne convertit une énergie électromagnétique provenant d'une direction donnée de l'espace, en une énergie électrique qui existe à la surface de l'antenne et qui, une fois recueillie et amplifiée, formera le signal reçu.
Cette conversion d'énergie ne se fait pas sans pertes; ainsi, une antenne est caractérisée par un coefficient de rendement entre 0 et 1, que l'on souhaite être le plus élevé possible.
Si l'on désire utiliser le radar pour localiser une cible, il faut concevoir l'antenne de manière à ce qu'elle ne reçoive les ondes ne provenant que d'une direction privilégiée; cette opération a également un effet secondaire bénéfique dans la mesure où l'antenne aura une meilleure portée tant en réception qu'en émission dans cette direction. L'antenne est donc également caractérisée par sa directivité et son "gain" maximal.
On verra plus loin dans ce paragraphe que la directivité de l'antenne est influencée par la longueur d'onde du signal émis et des dimensions de l'antenne; dans certaines applications (radar embarqué sur avion ou satellite), les dimensions de l'antenne peuvent être une contrainte forte qui doit donc également être considérée.
Antennes filaires

Pour des raisons techniques (le magnétron n'étant pas encore pas totalement maîtrisé), les premiers radars de la Seconde guerre mondiale travaillaient à des fréquences basses pour lesquelles il était commode d'utiliser des antennes filaires. Ces antennes sont bien connues du grand public car leur forme n'est à la base pas différente de celle des antennes de nos postes radio ou de nos télévisions. En fonction de l'agencement des brins composant l'antenne, il est possible d'obtenir une antenne plus ou moins directive. Une antenne monobrin sera omnidirectionnelle dans le plan médian de l'antenne; au contraire, une antenne Yagi est très directive dans son axe principal. Cette dernière est la célèbre "antenne râteau" qui est typiquement utilisée en télévision.
Plusieurs possibilités d'utilisations ont été explorées au cours du temps. Ainsi, le système "Chain Home" britannique durant la Seconde Guerre mondiale, était formé d'antennes dipolaires qui émettaient de façon omni-directionnelle, et d'antennes réceptrices directionnelles. Ces dernières étaient formées de deux antennes dipolaires placées à angle droit. En effet, pour une antenne dipolaire, la réception est maximale à angle droit de la source d'échos, et minimale lorsque l'antenne pointe sa direction. L'opérateur radar peut donc déterminer la direction du signal en tournant les antennes pour déterminer ce doublet max/min des affichages de ses deux antennes. Les premiers radars aéroportés, comme le radar allemand Lichtenstein de la seconde guerre mondiale étaient souvent formés de réseaux d'antennes Yagi montés sur le nez de l'avion. Ces antennes ajoutaient une traînée supplémentaire à l'avion, ce qui n'est généralement pas désirable ; or il n'était pas possible d'utiliser des antennes moins encombrantes, car celles-ci n'étaient pas adaptées à la fréquence basse qui était alors utilisée.
Les antennes filaires restent utilisées de nos jours pour les radars à "basse" fréquence (en dessous de quelques centaines de mégahertz, mais il n'y a pas de limite exacte).
Antenne à ouverture
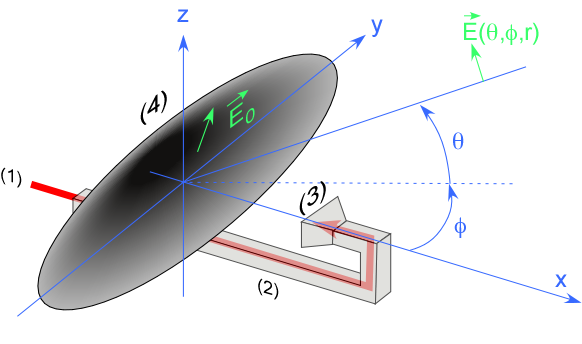
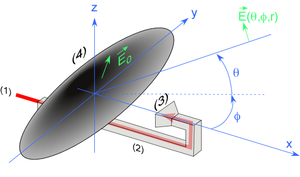 Antenne à ouverture typique (1) trajectoire de l'onde électromagnétique transitant dans le guide d'onde (2) avant d'arriver dans un cornet (3) qui éclaire la surface du réflecteur (4) formant l'ouverture, donnant ainsi naissance à un champ électrique
Antenne à ouverture typique (1) trajectoire de l'onde électromagnétique transitant dans le guide d'onde (2) avant d'arriver dans un cornet (3) qui éclaire la surface du réflecteur (4) formant l'ouverture, donnant ainsi naissance à un champ électrique (pas nécessairement constant) sur l'ouverture.
(pas nécessairement constant) sur l'ouverture.Pour les radars à hyperfréquences, un type classique d'antenne est l'antenne à ouverture. Cette antenne fonctionne de la manière suivante:
- l'onde électromagnétique générée par le magnétron est conduite vers l'antenne en suivant le trajet (1) au travers d'un guide d'onde (2);
- le guide d'onde se termine par un cornet (3) qui éclaire la surface d'une plaque ou d'un grillage de grandes dimensions qui fait office de réflecteur (4);
- le champ électrique qui se forme à la surface de cette surface va à son tour donner naissance à une onde électromagnétique qui va se propager dans l'espace. Le champ sur la surface du réflecteur peut être variable en amplitude et en direction.
Si le « réflecteur » est de forme parabolique, et si le cornet est situé au foyer de la parabole, alors les rayons réfléchis par la surface repartiront grosso modo de manière parallèle vers l'infini dans la direction x, tout comme l'ampoule d'un phare de voiture est située au foyer d'un réflecteur parabolique métallisé qui réfléchit les rayons lumineux loin sur la route.
Toutefois, à la différence du phare de voiture, la taille de la surface formant le réflecteur est relativement petite devant la longueur d'onde du signal émis et il n'est alors pas possible de négliger les phénomènes de diffraction. Chaque point de la surface du réflecteur va rayonner comme une source ponctuelle, et le champ total émis en un point est la somme cohérente de tous les champs infinitésimaux. Tout se passe comme dans le cas de la diffraction d'une onde par une ouverture. Afin de mieux sentir la physique du phénomène, considérons le cas idéalisé suivant:
- l'ouverture est plane et rectangulaire, de dimensions L (sur l'axe y) et l (sur l'axe z);
- la surface métallique de l'ouverture est parfaitement conductrice;
- le champ électrique engendré par le cornet sur la surface de l'antenne de direction constante et d'amplitude constante E0;
Soit à mesurer l'amplitude de l'onde émise dans une direction repérée par les angles φ (angle azimutal horizontal ou gisement) et θ (angle d'élévation ou de site), et mesurée à une distance r de l'antenne suffisamment grande pour que l'approximation de Fraunhofer soit vérifée. La théorie de la diffraction montre que celle-ci vaut :
Dans cette expression, sinc est la fonction sinus cardinal définie par sin(x) / x. L'amplitude maximale est obtenue sur l'axe X.
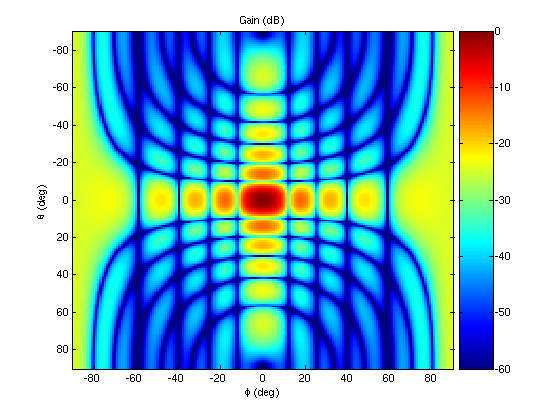
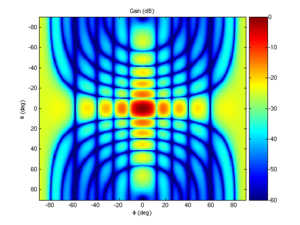 Gain normalisé d'une antenne rectangulaire idéale de longueur 20 cm, largeur 10 cm, à une fréquence de 10 GHz (bande X)
Gain normalisé d'une antenne rectangulaire idéale de longueur 20 cm, largeur 10 cm, à une fréquence de 10 GHz (bande X)Le diagramme de droite donne l'allure de l'évolution de la puissance de l'onde, normalisée par rapport à la puissance maximale émise, en fonction du site et du gisement (échelle logarithmique). On voit apparaître un pic central qui représente le lobe principal du radar, ainsi que des pics secondaires représentant des lobes secondaires. Ici, l'antenne a pour dimensions 20 cm par 10 cm, ce qui a pour avantage de rendre les lobes bien visibles; dans la réalité, il peut être désirable d'avoir des antennes plus grandes pour avoir un lobe principal plus fin (de l'ordre du degré). La majeure partie de l'énergie émise ou reçue par une antenne vient du lobe principal; en particulier, si un signal réfléchi est reçu par l'antenne, il y aura une forte probabilité pour que la cible se trouve dans la direction donnée par le lobe principal. On désire cependant réduire les lobes secondaires le plus possible, car ils ne sont pas négligeables. La réduction des lobes secondaires peut être réalisée, par exemple, en s'arrangeant pour que l'illumination du réflecteur ne soit plus constante, mais importante au centre et doucement décroissante aux bords.
Si θ = 0, l'ensemble des angles pour lesquels la puissance est au moins égale à la moitié de la puissance maximale correspond aux angles donnant un argument supérieur à
 dans le premier sinus cardinal; numériquement, l'ouverture angulaire Rφ de ce domaine vaut, pour de petites ouvertures:
dans le premier sinus cardinal; numériquement, l'ouverture angulaire Rφ de ce domaine vaut, pour de petites ouvertures:
Il vient une relation similaire si
 , en remplaçant l par L. On voit que pour réduire l'ouverture angulaire de l'antenne, il y a deux méthodes:
, en remplaçant l par L. On voit que pour réduire l'ouverture angulaire de l'antenne, il y a deux méthodes:- soit augmenter la taille de l'antenne
- soit diminuer la longueur d'onde / monter en fréquence
La popularité des antennes à ouverture décroît en 2008 en faveur des antennes patch et des antennes à fentes (surtout dans le domaine civil), sauf dans quelques applications où la puissance à l'émission est importante; cependant, la théorie n'est pas très différente et les résultats énoncés ci-dessus restent valides qualitativement.
Guide d'ondes à fentes
 Guide d'onde à fentes
Guide d'onde à fentesEn général, le signal venant de l'émetteur se déplace dans un guide d'onde dans l'antenne émettrice. Il est cependant possible de transformer le guide d'onde lui-même en antenne en y perçant des fentes. L'interférence entre les différentes fentes crée en effet un patron de diffusion avec un pic central intense et des pics secondaires plus faibles dans la direction selon laquelle sont dirigées les fentes. On obtient ainsi un faisceau radar directionnel semblable à celui d'une antenne parabolique.
Ce type d'antenne a une bonne résolution selon son axe, mais aucune dans l'axe perpendiculaire. Il suffit ensuite de faire tourner mécaniquement le guide d'onde ainsi troué sur 360 degrés pour obtenir un balayage de l'horizon. Ce type d'antenne est particulièrement utilisé dans les cas où on ne s'intéresse qu'à ce qui se trouve dans le plan balayé sans nécessiter une très grande précision. C'est ce type d'antennes que l'on voit sur les navires, le long des pistes des aéroports et dans les ports et qui ressemblent à de longs haut-parleurs placés horizontalement et en rotation sur un mât. Ils sont très économiques et moins affectés par le vent que d'autres types d'antenne.
Antennes patch
Les antennes patch sont constituées d'un circuit imprimé double face métallisé. Elles ont l'avantage d'être très peu onéreuses, légères et très flexibles à l'utilisation. Pour cela, elles trouvent souvent un usage pour les applications d'imagerie à antenne synthétique où elles peuvent être montées de manière conforme sur la coque d'un avion, d'un drone, ou embarquées sur un satellite. Le radar français RAMSES (Radar Aéroporté Multi-Spectral d'Étude des Signatures) utilise par exemple une telle technologie.[8]. Les résultats démontrés pour les antennes à ouverture restent qualitativement valides pour les antennes patch, c'est-à-dire l'ouverture angulaire diminue quand la dimension de l'antenne augmente et la longueur d'onde diminue.
Antennes réseau à commande de phase
Pour plus d'informations, voir les articles : Antenne réseau à commande de phase et Radar tridimensionnel à balayage électronique.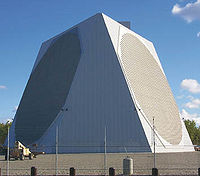 Radar tridimensionnel à balayage électronique géant en Alaska
Radar tridimensionnel à balayage électronique géant en AlaskaUne autre méthode utilisée pour diffuser le faisceau radar est celui des antennes réseau à commande de phase. Dans ce système, on divise le guide d'onde venant de l'émetteur en un très grand nombre de sous-guides d'onde. Ces derniers se terminent chacun par une fente sur une plaque faisant face à une direction. En contrôlant la phase de l'onde passant dans chacune de ces fentes, on peut créer un patron d'interférences qui donne une émission dans une direction particulière. On peut changer la direction vers laquelle l'antenne émet sans avoir à bouger celle-ci : il n'y a qu'à changer l'arrangement des phases des fentes.
Comme le changement de l'arrangement se fait électroniquement, on peut procéder à un balayage de l'horizon et de la verticale en un temps beaucoup plus rapide que ne le ferait une antenne parabolique en rotation mécanique. On peut même arranger le patron d'émission de telle sorte qu'on ait deux faisceaux, ce qui créer deux radars virtuels. Cependant, le faisceau n'est pas très précis dans la direction rasant la plaque et c'est pourquoi on arrange généralement trois ou quatre plaques de ce type dans des directions différentes pour couvrir tout le volume autour du radar. Ceci donne un radar tridimensionnel à balayage électronique.
Les antennes réseau à commande de phase ont été utilisées en premier durant la Seconde guerre mondiale mais les limitations de l'électronique du temps n'ont pas permis d'avoir des résultats de bonne résolution. Durant la Guerre froide, un grand effort a été fourni pour leur développement, car les cibles très rapides comme les avions de chasse et les missiles se déplacent trop rapidement pour être suivis par les systèmes conventionnels. Elles sont le cœur du système de combat Aegis des navires de guerre et du système anti-missiles Patriot. Elles sont de plus en plus utilisées, malgré leur coût important, dans d'autres domaines où la vitesse de sondage et l'encombrement sont critiques, comme à bord des avions de chasse. Dans ces derniers, elles sont très appréciées pour leur capacité à suivre plusieurs cibles. Elles y furent introduites en premier dans le Mikoyan MiG-31. Son antenne à commande de phase, la Zaslon SBI-16, est considérée comme la plus puissante des antennes pour avions de chasse.
Avec la baisse du prix des pièces électroniques, ce genre d'antennes se répand de plus en plus. Presque tous les systèmes militaires de radar utilisent ce concept, car le coût additionnel est facilement compensé par sa polyvalence et sa fiabilité (moins de pièces mobiles). L'antenne réseau à commande de phase pour radar se retrouve également dans les satellites et on procède même à des essais au National Weather Service américain pour son utilisation dans les radars météorologiques. L'antenne parabolique est encore utilisée dans l'aviation générale et les autres utilisations civiles mais cela pourrait changer si les coûts continuent à décliner.
On distingue généralement les antennes à balayage électroniques actives des antennes à balayage électronique passives. Dans le cas des antennes à balayage électronique passives, une seule source génère l'onde, qui est ensuite déphasée de manière adéquate pour chacun des éléments radiatifs de l'antenne. Dans les antennes à balayage électronique actives, l'antenne est en réalité un ensemble de plusieurs (1000 à 1500, typiquement) sous-antennes indépendantes les unes des autres et disposant chacune de leur source propre. L'avantage de cette dernière approche est de pouvoir assurer le fonctionnement du système après reconfiguration même si l'une des sous-antennes est défectueuse. Le radar RBE-2 qui équipe le chasseur français Rafale est un exemple de radar à balayage électronique à antenne passive. Le radar AN/APG 77 équipant le chasseur américain F-22 est équipé d'antennes actives.
Antenne synthétique
Comme son nom l'indique, il ne s'agit pas à proprement parler d'une antenne physique, mais d'un traitement appliqué au signal brut reçu par le radar, en fin de chaîne. En utilisant une antenne sur un porteur (avion ou satellite) en mouvement, on réalise la sommation cohérente du signal reçu correspondant à un même point de l'espace, sur plusieurs instants successifs, en s'arrangeant pour que l'objet reste dans le lobe principal de l'antenne sur cette durée. Cette sommation augmente artificiellement la résolution de l'image, sans pour autant devoir augmenter la taille physique de l'antenne. Cette solution a un intérêt certain pour des radars embarqués sur satellite ou sur avion, car elle permet d'avoir de bonnes performances pour un poids et un encombrement minimes.
Réfrigérant de radar
Le coolanol et le PAO (poly alpha olefin) sont les deux principaux réfrigérants utilisés dans les radar aéroportés. La U.S. Navy ayant institué un programme anti-pollution pour réduire les déchets toxiques, le Coolanol est moins en usage depuis quelques années. Le PAO est un lubrifiant synthétique composé d'esters de polyol, d'anti-oxydants, d'inhibiteurs de rouille et de triazole un "yellow metal pacifier".
Les principes de fonctionnement
Réflexion
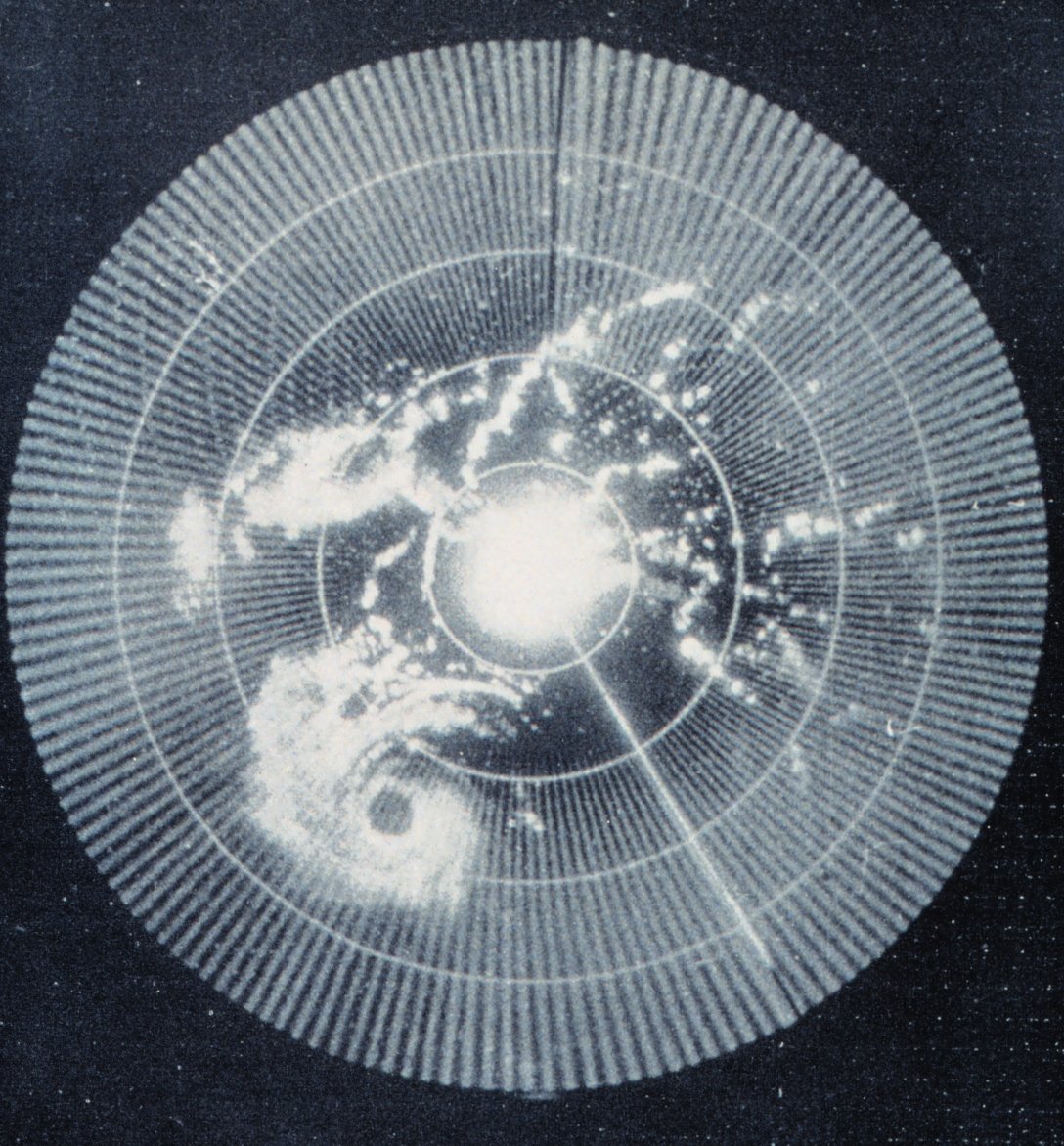
 La luminosité sur un affichage radar est proportionnelle à la réflectivité des cibles, comme le montre cette image radar météo de 1960. La fréquence de l’onde, la forme de l'impulsion et le type d’antenne déterminent ce que le radar peut observer.
La luminosité sur un affichage radar est proportionnelle à la réflectivité des cibles, comme le montre cette image radar météo de 1960. La fréquence de l’onde, la forme de l'impulsion et le type d’antenne déterminent ce que le radar peut observer.Les ondes électromagnétiques sont réfléchies par tout changement significatif des constantes diélectriques ou diamagnétiques du milieu traversé. Cela signifie qu’un objet solide dans l’air ou le vide, ou tout autre changement significatif de la densité atomique entre l’objet et ce qui l’entoure, disperse les ondes radar. C’est particulièrement vrai pour les matériaux conducteurs d’électricité, tels les métaux et la fibre de carbone, ce qui rend les radars très adaptés à la détection d’avions et bateaux.
La portion de l'onde qui est retournée au radar par une cible est appelée sa réflectivité. La propension de la cible à réfléchir ou disperser ces ondes est appelée sa surface efficace radar. En fait, les ondes radar se dispersent de façons différentes suivant la longueur d'onde utilisée, la forme de la cible et sa composition:
- Si la longueur d’onde est beaucoup plus petite que la taille de la cible, l’onde rebondira dessus comme la lumière sur un miroir. La section efficace dépendra dans ce cas de la forme de la cible et de ses propriétés réflectives.
- Si la longueur d’onde est beaucoup plus grande que la taille de la cible, les atomes de cette dernière seront polarisés. C'est-à-dire que les charges négatives et positives dans le matériaux seront séparées comme dans une antenne dipolaire. Ceci est décrit par le modèle de la diffusion Rayleigh qui prédit le bleu du ciel et le rouge d’un coucher de soleil. Dans cette situation, la section efficace sera proportionnelle au diamètre de la cible et à ses propriétés réflectives.
- Quand les deux longueurs sont comparables, il peut se produire des résonances entre les atomes de la cible et la réflexion se comporte selon la théorie de Mie, rendant le patron de réémission très variable.
Les premiers radars utilisaient des longueurs d’onde beaucoup plus importantes que la taille des cibles et recevaient un signal vague, tandis que certains radars modernes utilisent des longueurs d’onde plus courtes (quelques centimètres, voire moins) qui peuvent voir des objets plus petits, comme la pluie ou les insectes.
Les ondes radio courtes sont réfléchies par les courbes et des angles aigus comme la lumière sur un morceau de verre arrondi. Les cibles les plus réfléchissantes pour des courtes longueurs d’ondes présentent des angles de 90 ° entre leurs surfaces réfléchissantes. Une structure composée de trois surfaces planes se rejoignant en un seul coin (par exemple le coin d’une boîte) réfléchira toujours les ondes entrantes directement vers leur source. Ces types de réflexion sont couramment utilisés comme réflecteurs radar afin de détecter plus facilement des objets difficilement décelables autrement, et sont souvent présents sur des bateaux afin d’améliorer leur détection en cas de sauvetage et pour réduire les risques de collision.
Pour les mêmes raisons, les objets voulant éviter d’être détectés vont orienter leurs surfaces afin d’éliminer les coins intérieurs et éviter les surfaces et arêtes perpendiculaires aux directions de détection courantes. Cela conduit à des avions furtifs aux formes particulières. Ces précautions n’éliminent pas complètement les réflexions à cause du phénomène de diffraction, particulièrement pour les grandes longueurs d’onde. Des câbles ayant pour longueur la moitié de la longueur d’onde ou des bandes de matériau conducteur (comme les « paillettes » de contre-mesures radar) sont très réfléchissants mais ne renvoient pas l’onde vers sa source.
Un autre façon de se camoufler est d'utiliser des matériaux absorbant les ondes des radars, c'est-à-dire contenant des substances résistantes ou/et magnétiques. On les utilisent sur les véhicules militaires afin de réduire la réflexion de l’onde. C’est en quelque sorte équivalent de peindre quelque chose de couleur sombre dans le spectre visible.
Calcul de la réflectivité
Selon l'équation radar, la puissance
 retournée au radar depuis la cible est :
retournée au radar depuis la cible est : Où
Où  est la puissance transmise,
est la puissance transmise,  est la distance et
est la distance et  est la section efficace de la cible.
est la section efficace de la cible.
La réflectivité étant définie comme
 , on voit:
, on voit:- Que des cibles se trouvant à des distances différentes mais ayant les mêmes caractéristiques de réflexion donneront des échos fort différents, et, dans tous les cas, beaucoup plus faibles que le signal émis. Cette équation tient compte seulement de la diminution de la puissance du signal due à la distance et ne tient pas compte de l'atténuation causée par l'absorption du milieu traversé.
- Que la réflectivité dépend de la section efficace qui est trouvée selon ce qu'on a montré antérieurement. D’autres développements mathématiques influent sur la section efficace. Ceux-ci incluent des analyses basées à la fois sur le temps et la fréquence comme la théorie des ondelettes et la transformée de Chirplet. Elles utilisent le fait que les cibles en mouvement des radars sont typiquement « chantantes » (c'est-à-dire qu’elles changent leur fréquence en fonction du temps, comme le chant d’un oiseau ou des chauves-souris).
Polarisation
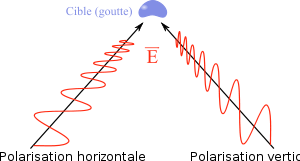 Illumination de la cible avec polarisation horizontale et verticale. Notez la forme de la cible qui donnera un retour plus intense avec l'onde horizontale
Illumination de la cible avec polarisation horizontale et verticale. Notez la forme de la cible qui donnera un retour plus intense avec l'onde horizontaleDans le signal émis par le radar, le champ électrique est perpendiculaire à la direction de propagation, et la direction de ce champ électrique est la polarisation de l’onde. Les radars utilisent une polarisation verticale, horizontale et circulaire pour détecter différents types de réflexions.
- Par exemple, la polarisation circulaire est utilisée pour minimiser les interférences causées par la pluie.
- Une polarisation linéaire indique généralement des surfaces métalliques, et aide un radar de recherche à ignorer la pluie.
- Une polarisation aléatoire indique généralement une surface fractale, par exemple du roc ou de la terre, et est utilisée par les radars de navigation.
Interférences
Il existe de nombreuses sources de signaux malvenus, que les radars doivent pouvoir ignorer plus ou moins, afin de se focaliser uniquement sur les cibles intéressantes. Ces signaux malvenus peuvent avoir des origines internes et externes, passives et actives. La capacité d’un radar à surmonter ces nuisances définit son rapport signal sur bruit (SNR) : plus le SNR est grand, plus le radar peut séparer efficacement une cible des signaux parasites alentour.
Bruit
Le bruit est une source interne de variations aléatoires du signal, que tous les composants électroniques génèrent de façon inhérente à différents degrés. Le bruit apparaît typiquement comme constitué de variations aléatoires superposées au signal d’écho reçu par le radar, lequel est celui qu'on recherche. Plus la puissance du signal désiré est faible, plus il est difficile de le discerner du bruit (tenter d’entendre un murmure près d’une route encombrée est similaire). Ainsi, les sources de bruit les plus importunes apparaissent au niveau du récepteur et beaucoup d’efforts sont faits pour minimiser ces facteurs. La facteur de bruit est une mesure du bruit produit par un récepteur comparé à celui produit par un récepteur idéal, et ce ratio doit être minimal.
Le bruit est aussi généré par des sources extérieures, principalement par les radiations thermiques naturelles de l’environnement entourant la cible du radar. Dans le cas des radars modernes, grâce aux hautes performances de leurs récepteurs, le bruit interne est inférieur ou égal au bruit de l’environnement extérieur, sauf si le radar est pointé vers un ciel dégagé, auquel cas l’environnement est si froid qu’il génère très peu de bruit thermique.
Échos parasites
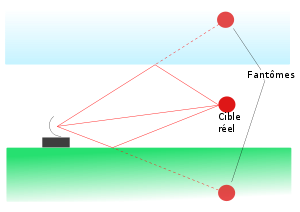 Les échos dus au phénomène de trajets multiples d’une cible font apparaître des fantômes.
Les échos dus au phénomène de trajets multiples d’une cible font apparaître des fantômes.
Les échos parasites sont des retours venant de cibles qui sont par définition inintéressantes pour l'opérateur radar. Les causes de ces échos sont :
- Des objets naturels tels que le sol, la mer, les précipitations (telles que la pluie, la neige ou la grêle), les tempêtes de sable, les animaux (particulièrement les oiseaux), les turbulences atmosphériques, et d’autres effets atmosphériques (par exemple les chutes de météores ou les réflexions sur l’ionosphère).
- Des objets fabriqués par l’homme tels que les immeubles ou des paillettes métalliques lâchées intentionnellement comme contre-mesures dans la guerre électronique.
- Les supports du guide d'onde partant de l'antenne vers le cornet d'émission situé au point focal de la parabole. Dans un affichage radar comme le PPI, ces échos indésirables ressembleront à des points très brillants au centre de l’affichage.
- Des réflexions venant de trajets par réflexions multiples sur une cible. Ainsi, le faisceau radar frappe une cible et comme l'onde émise est réfléchie dans toutes les directions, une partie peut être réfléchie sur une autre cible et retourner au radar. Comme le temps mis pour cette seconde réflexion pour atteindre le radar est plus long que le retour direct, elle sera placée au mauvais endroit. On peut ainsi obtenir deux cibles au lieu d'une.
- Des échos de propagation anormale dans l'atmosphère. En effet, le trajet que doit parcourir le faisceau radar est calculé à partir d'une structure normale de l'atmosphère. Si la température varie différemment de la norme, le faisceau sera dévié anormalement. Dans le cas où la température augmente avec l'altitude (inversion de température), le faisceau est dévié vers le sol et on a un très fort retour de ce dernier.
- Des échos venant des réflexions/réfractions ionosphériques. Ce type de parasites est particulièrement difficile à identifier, puisqu’il est en mouvement et se comporte de la même manière que les cibles voulues, créant ainsi un fantôme.
- Des objets très réfléchissants visibles au travers d'un lobe secondaire de l'antenne, alors que l'antenne pointe vers une zone moins réfléchissante. On verra alors un fantôme dans la direction où pointe le lobe principal.
Il est à noter que ce qui est un écho indésirable pour certains peut cependant être le but recherché par d'autres. Ainsi les opérateurs à l'aviation veulent éliminer tout ce dont on vient de parler mais les météorologistes considèrent que les avions sont du bruit et ne veulent garder que les signaux provenant des précipitations.
Les échos parasites sont considérés comme une source d’interférences passive, puisqu’elles ne sont détectées qu'en réponse aux signaux émis par le radar. Il existe plusieurs façons d'éliminer ces échos. Plusieurs de ces méthodes reposent sur le fait que ces échos tendent à être stationnaires lors des balayages du radar. Ainsi, en comparant des sondages radar successifs, la cible désirée sera mobile et tous les échos stationnaires pourront être éliminés. Les échos de mer peuvent être réduits en utilisant une polarisation horizontale, tandis que la pluie est réduite avec une polarisation circulaire (notez que les radars météorologiques souhaitent obtenir l’effet inverse, utilisant donc une polarisation horizontale afin de détecter les précipitations). Les autres méthodes visent à augmenter le rapport signal sur bruit.
La méthode CFAR (Constant false alarm rate, parfois appelée AGC pour Automatic Gain Control) repose sur le fait que les échos dus aux parasites sont beaucoup plus nombreux que ceux dus à la cible. Le gain du récepteur est automatiquement ajusté afin de maintenir un niveau constant des échos parasites visibles. Les cibles ayant un retour plus important que les parasites ressortiront facilement de ces derniers, même si les cibles plus faibles se perdent dans le bruit. Par le passé, le CFAR était contrôlé électroniquement et affectait également tout le volume sondé. Maintenant, le CFAR est contrôlé par ordinateur et peut être réglé différemment en chaque zone de l'affichage. Ainsi il s'adapte au niveau des échos parasites selon la distance et l'azimut.
On peut utiliser également des masques de régions connues d'échos parasites permanents (par ex. les montagnes) ou incorporer une carte des environs du radar pour éliminer tous les échos ayant une origine située sous le niveau du sol ou au-dessus d’une certaine hauteur. Pour réduire les retours des supports du cornet d'émission sans diminuer la portée, il est nécessaire d’ajuster la période muette entre le moment où l’émetteur envoie une impulsion et le moment où le récepteur est activé, afin de ne pas tenir compte de retours internes à l’antenne.
Brouillage
Le brouillage radar se réfère aux fréquences radios originaires de sources extérieures au radar, émettant à la fréquence du radar et masquant donc les cibles intéressantes. Le brouillage peut être intentionnel (un dispositif antiradars dans le cas d’une guerre électronique) ou non voulu (par exemple dans le cas de forces alliées utilisant du matériel qui émet dans la même gamme de fréquences). Le brouillage est considéré comme une source d’interférences active, puisqu’il est causé par des éléments extérieurs au radar et généralement sans lien avec les signaux du radar.
Le brouillage pose des problèmes aux radars puisque les signaux de brouillage n’ont besoin de parcourir qu’un aller (du brouilleur au récepteur du radar) alors que les échos du radar parcourent un aller-retour (radar-cible-radar) et sont donc beaucoup moins puissants une fois de retour au récepteur. Les brouilleurs ont donc beaucoup moins besoin d’être puissants que les radars afin de masquer efficacement les sources le long du champ de vision depuis le brouilleur vers le radar (brouillage du lobe principal). Les brouilleurs ont un effet supplémentaire sur les radars situés le long d’autres champs de visions, à cause des lobes secondaires du récepteur du radar (brouillage des lobes latéraux).
Le brouillage du lobe principal peut généralement être réduit seulement en réduisant son angle solide, et ne peut jamais être complètement éliminé si le brouilleur est situé directement face au radar et s’il utilise les mêmes fréquences et polarisation que le radar. Le brouillage des lobes secondaires peut être surmonté en réduisant les lobes de réception secondaires dans la conception de l’antenne du radar et en utilisant une antenne unidirectionnelle afin de détecter et ignorer tous les signaux non destinés au lobe principal. Des travaux sont également menés actuellement sur les antennes à balayage électronique actif afin de leur permettre de repositionner dynamiquement leurs lobes secondaires en cas de brouillage. Enfin, on peut citer d’autres techniques antibrouillage : le frequency hopping et la polarisation par exemple. Se référer aux contre-contre-mesures électroniques pour plus de détails.
Les interférences sont récemment devenues un problème pour les radars météorologiques de bande C (5,66 GHz) à cause de la prolifération des équipements Wi-Fi à 5,4 GHz.
Traitement des signaux radar
Mesure de distance
Temps de retour du signal
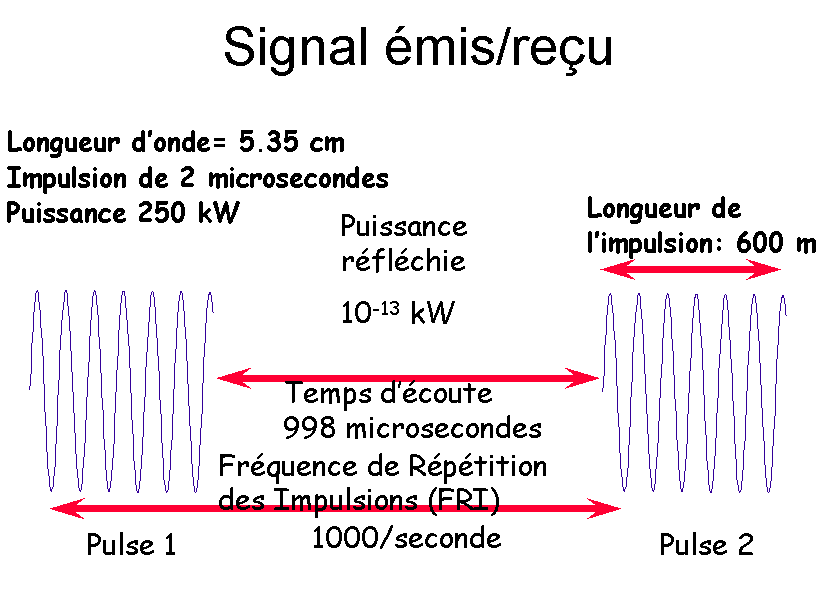
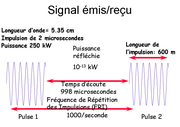 Schéma du fonctionnement d'un radar météorologique de bande C à impulsion
Schéma du fonctionnement d'un radar météorologique de bande C à impulsionUne manière de mesurer la distance à un objet est d'émettre une courte impulsion de signal radio, et de mesurer le temps que prend l'onde pour revenir après avoir été réfléchie. La distance est la moitié du temps de retour de l'onde (car le signal doit aller à la cible puis revenir) multipliée par la vitesse du signal (qui est proche de la vitesse de la lumière dans le vide si le milieu traversé est l'atmosphère).
Quand l'antenne est à la fois émettrice et réceptrice (ce qui est le cas le plus courant), l'antenne ne peut pas détecter l'onde réfléchie (aussi appelée retour) pendant que le signal est émis - on ne peut pas savoir si le signal mesuré est l'original ou le retour. Cela implique qu'un radar a une portée minimale, qui est la moitié de la durée de l'impulsion multipliée par la vitesse de la lumière. Pour détecter des cibles plus proches, il faut utiliser une durée d'impulsion plus courte.
Un effet similaire impose de la même manière une portée maximale. Si le retour arrive quand l'impulsion suivante est émise, une fois encore le récepteur ne peut pas faire la différence. La portée maximale est donc calculée par:
 où c est la vitesse de la lumière et Δt est le temps entre deux impulsions
où c est la vitesse de la lumière et Δt est le temps entre deux impulsions
La forme de l'impulsion joue sur la capacité du radar à distinguer deux objets proches (notion de Pouvoir de résolution). Voir l'article consacré à la compression d'impulsion pour plus de détails.
Cette forme d'émission est utilisée par les radars à impulsions.
Modulation de fréquence
Une autre façon de mesurer la distance au radar est d'utiliser une modulation de la fréquence d'un radar à émission continue. L'onde est émise par une antenne et reçue par une seconde antenne puisque le même électronique ne peut émettre et recevoir à la fois. Dans ce cas le signal émis au temps T a une fréquence A mais une fréquence B au temps T' ultérieur. Le signal émis à T qui frappe une cible et revient au radar aura donc une fréquence différente de celle émise à ce moment par le radar. En faisant la différence entre les deux fréquences, on peut déduire la distance parcourue, aller-retour, entre le radar et la cible. On utilise généralement une variation sinusoïdale de fréquences qu'il est facile d'étalonner et la comparaison entre les deux fréquences est faite en utilisant les battements inter-fréquentiels. Cette technique est utilisée depuis longtemps dans les altimètres pour mesurer l'altitude de vol et peut être utilisée dans les radars comme les détecteurs de vitesse de la police routière.
Cette forme d'émission est utilisé par les radars à émission continue.
Mesure de vitesse
Il existe différentes méthodes pour mesurer la vitesse de déplacement d'une cible:
- La plus ancienne consiste à noter sa position à un instant X, à l'aide d'un crayon gras, sur l'affichage radar. À un instant Y, on refait la même chose et la différence des deux positions divisée par le temps écoulé entre X et Y donne la vitesse de déplacement.
 L'effet Doppler-Fizeau
L'effet Doppler-Fizeau- On peut également noter la variation de fréquence de l'onde émise par rapport à celle reçue lorsqu'on émet continuellement à une fréquence fixe. Il s'agit là de l'utilisation de l'Effet Doppler-Fizeau. Comme on ne fait pas varier la fréquence émise, on ne peut cependant pas définir la position de la cible de cette manière. En plus, on n'a que la composante radiale au radar de la vitesse. Par exemple, une cible se déplaçant perpendiculaire au faisceau radar ne causera pas de changement de fréquence alors que la même cible se déplaçant vers le radar à la même vitesse provoquera un changement maximal.
- La plus courante des méthodes est d'utiliser une variante de l'effet Doppler avec un radar à impulsions. Dans ce cas, on note la différence de phase entre les impulsions successives revenant de la cible. Cette méthode permet de déterminer la vitesse radiale ET la position de la cible.
Vitesse Doppler avec radar à impulsions
Au lieu de mesurer la différence de fréquence entre l'onde émise et celle reçue, qui peut être trop minime pour l'électronique, on utilise la différence de phase entre deux impulsions successives revenant d'un même volume sondé (paire d'ondes pulsées). Entre chaque impulsion, les cibles se déplacent légèrement et sont frappées par l'onde à une partie légèrement différente de son cycle. C'est cette différence de phase que le radar note au retour.
L'intensité d'une impulsion après un aller-retour est donnée par :
 Différence de phase entre deux ondes revenant d'une cible ayant bougé
Différence de phase entre deux ondes revenant d'une cible ayant bougé
L'intensité d'une impulsion subséquente revenant du même volume sondé mais où les cibles ont légèrement bougé est donnée par:

Donc

 La portée maximale et la vitesse Doppler maximale non ambigüe varient de façon inverse (rouge pour la portée et bleu pour la vitesse maximale)
La portée maximale et la vitesse Doppler maximale non ambigüe varient de façon inverse (rouge pour la portée et bleu pour la vitesse maximale)Comme on n'obtient que la composante radiale du déplacement, il faut donc le suivre pour savoir l’angle que fait sa véritable direction de déplacement avec le rayon au radar. Par la suite, un simple calcul trigonométrique donne la véritable vitesse de la cible.
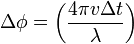
Dilemme Doppler
Intéressons-nous maintenant à la vitesse maximale qu'on peut mesurer sans ambiguïté. Comme on ne peut déterminer à partir d'un sinus qu'un angle compris entre -π et +π, on ne peut mesurer une vitesse supérieure à:
C'est ce qu'on appelle la vitesse de Nyquist. Pour obtenir une meilleure détermination de la vitesse des cibles, il faut envoyer des impulsions très rapprochées, donc avec
 très petit. Mais on sait également que la portée en réflectivité est directement proportionnelle à Δt, ce qui demande un grand Δt pour être sûr de la position des échos revenant de loin sans ambiguïté.
très petit. Mais on sait également que la portée en réflectivité est directement proportionnelle à Δt, ce qui demande un grand Δt pour être sûr de la position des échos revenant de loin sans ambiguïté.Ce dilemme Doppler limite la portée utile des radars Doppler à impulsions. Il existe cependant une façon de le contourner en utilisant une fréquence de répétition des impulsions radar multiple. La position et la vitesse des vrais échos demeure la même avec les différents taux de répétition alors que celles des échos fantôme changent.
Réduction des interférences
Le traitement du signal est nécessaire pour éliminer les interférences (dues à des sources radio autres que celle du radar) ainsi que les échos parasites. On utilise les techniques suivantes:
- Élimination en suivant seulement les échos qui bougent (Visualisation des cibles mobiles).
- Filtrage des échos en utilisant leur vitesse Doppler : les échos parasites et les interférences ont généralement des vitesses nulles.
- Corrélation avec des radars de surveillance secondaires : il s'agit d'un dispositif qui envoie depuis la cible un signal lorsqu'il reçoit un faisceau radar. Ce signal identifie la cible et, selon le cas, son altitude et sa vitesse.
- Processus adaptif temps-espace : en utilisant une antenne réseau à commande de phase pulsée et les vitesses Doppler qu'on en obtient, on peut analyser le patron moyen des fréquences et en faire ressortir le pic qui indique la cible.
- Taux de fausse alarme constant : il s'agit de déterminer le niveau de bruit moyen continuel en chaque point de l'affichage radar et de ne garder que les échos ayant un retour supérieur à celui-ci.
- Masque digital du terrain qui permet d'éliminer les échos qui proviendraient de sous le niveau du sol.
Applications
 Écran de radar marin
Écran de radar marinLes premières utilisations opérationnelles du radar eurent lieu pendant la Seconde Guerre mondiale afin de détecter depuis la côte l'approche de formations aériennes, et de navires, tant par le Royaume-Uni que par les forces allemandes.
Les radars ont aujourd'hui une très grande variété d'applications dans de nombreux domaines :
- militaire : radars de détection et de surveillance aérienne au sol ou embarqués (sur chasseurs pour le combat aérien et sur AWACS); radars de veille de surface sur les navires de guerre ; radars d'atterissage ou d'appontage ; identification ami-ennemi ; autodirecteurs de missiles ; radars de détection terrestre ; radars d'artillerie ; brouilleurs radar ; satellites radar d'observation de la terre ;
- aéronautique : contrôle du trafic aérien ; guidage d'approche d'aéroport ; radars d'altimétrie ; radars de navigation ;
- maritime : radar de navigation ; anti-collision ; balises radars ; transpondeur ;
- météorologie : détection de précipitations (pluie, neige, grésil, grêle, etc.) et de formations nuageuses. Les radars les plus récents utilisent l'effet Doppler et sont donc capables d'évaluer la vitesse de ces particules. Certains radars utilisent les polarisations verticale et horizontale pour donner une idée du mélange de formes des particules sondées ce qui, associé à leur intensité, peut indiquer le type de précipitation ;
- circulation et sécurité routière : contrôle de la vitesse des automobiles (voir cinémomètre), le modèle classique sur les routes de France est le Miradop (mini radar doppler) utilisé par les brigades de gendarmerie. Ils sont placés sur les autoroutes, dans les zones où les véhicules peuvent rouler à une vitesse supérieure à la vitesse maximale autorisée. Radars de recul sur automobiles, Radar de régulation de distance (ACC Adaptive Cruise Control) ;
- scientifique : embarqués sur satellite pour l'observation de la Terre, du niveau des océans ;
Voici une liste non exhaustive des articles reliées au radar :
Pour plus de liens, aller à la Catégorie radarVoir aussi
Articles connexes
Liens externes
- (fr)Histoire brève du radar
- (fr)Explications simples du radar
- Le Radar - Sir Robert WATSON-WATT - Atomes : (fr)N°1 - mars 1946 et (fr)N°3 - Mai 1946
Notes
- ↑ (en)The inventor Christian Hülmeyer, Site 100 ans de Radar. Consulté le 2007-12-08[pdf]
- ↑ (en)Page, R.M.,, « The Early History of RADAR », dans Proceedings of the Institute of Radio Engineers, vol. Volume 50, no 5, Mai 1962
(Édition spéciale du 50ème anniversaire)Site de l'Institute of electrical and electronics engineers
- ↑ a et b (fr)Copie des brevets d'inventions du radar 1934, www.radar-france.fr. Consulté le 2006-12-08
- ↑ (fr)Maurice Ponte, « L'histoire du "radar ", les faits », www.radar-france.fr. Consulté le 2008-12-26
- ↑ (en)British man first to patent radar 1935, British Patent Office (Bureau des brevets britanniques). Consulté le 2007-12-08
- ↑ (en)Patent GB593017, UK Intellectual Property Office. Consulté le 2007-12-08
- ↑ (en)Zoltán Bay (1900 - 1992), Bureau des brevets hongrois. Consulté le 2007-12-08
- ↑ (en) Paillou et Dreuillet, The Pyla 2001 Experiment: Flying the new RAMSES P-Band facility [pdf] (retrouvé le 20 novembre 2006)
Bibliographie
Histoire
- Yves Blanchard, Le Radar, 1904-2004. Histoire d'un siècle d'innovations techniques et opérationnelles, éditions Ellipses. (ISBN 2729818022).
Introductions
- R. J. Doviak et D. S. Zrnic, Doppler Radar and Weather Observations, Academic Press. Seconde Édition, San Diego Cal., 1993, 562 pages.
- François Le Chevalier, Principes de traitement des signaux radar et sonar, éditions Masson, 1989. (ISBN 2-225-81423-6). Edition revue et corrigée, en anglais : Principles of Radar and Sonar signal processing, Artech House, Boston, Londres, 2002. (ISBN 1-58053-338-8).
- J.Ph. Hardange, P. Lacomme, J.C. Marchais, Radars aéroportés et spatiaux, Masson, 1995. Disponible en anglais en version revue et augmentée: Air and Spaceborne Radar Systems: an introduction, Institute of Electrical Engineers, 2001, (ISBN 0852969813)
- R. Rinehart, Radar for Meteorologist, 1997, par Rinehart Publications
Antennes
- Sophocles J. Orfanidis, Electromagnetic Waves and Antennas, livre en cours d'élaboration disponible gratuitement en ligne. Technique, mais complet.
Ouvrage de référence
- Merrill I. Skolnik, editor. Radar Handbook, McGraw-Hill, Seconde Edition, 1990. 1200 pages. (ISBN 0-07-057913-X)
Source
- (en) Cet article est partiellement ou en totalité issu d’une traduction de l’article de Wikipédia en anglais intitulé « Radar ».
 Portail de la physique
Portail de la physique Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique Portail de l’aéronautique
Portail de l’aéronautique Portail du monde maritime
Portail du monde maritime
Catégories : Acronyme | Astronautique | Radar | Instrument de navigation









Wikimedia Foundation. 2010.