- Radar Doppler pulsé
-
Un radar Doppler pulsé est un radar capable, non seulement de donner le cap, la distance et l'altitude d'une cible, mais aussi de mesurer sa vitesse radiale (portée-vitesse). Pour cela il utilise l'effet Doppler. Le retour des impulsions radioélectriques renvoyées par réflexion sur la cible sont traitées pour calculer le glissement de fréquence entre l'onde émise et celle qui est reçue. Pour cela, le système d'émission doit avoir une excellente stabilité de phase, on dit, dans ce cas, qu'il est « cohérent ».
La nature même des radars pulsés, et la relation qui existe entre la fréquence de la porteuse et la fréquence de répétition des impulsions radar (ou PRF pour Pulse repetition frequency) font que le spectre de fréquence peut être très complexe et risque de conduire à des erreurs. En général pour éviter le crénelage on choisit une fréquence d'impulsion très élevée, mais ce choix peut occasionner des effets secondaires comme l'affichage de plusieurs distances pour une seule cible. Pour éviter cela, on utilise plusieurs fréquences d'impulsions différentes.
Sommaire
Principe de base
Le radar pulsé Doppler est basé sur deux prémisses. La première est que la position de la cible peut être calculée en notant le temps entre l'émission d'une impulsion radar et son retour de la source. La seconde sur le fait qu'une cible qui se déplaçant avec une vitesse radiale non–nulle par rapport au faisceau radar provoque un glissement de fréquence entre la fréquence de référence de l'émetteur et celle de la porteuse reçue après reflexion sur la cible.
Position
 Principe du sondage radar pulsé
Principe du sondage radar pulsé
Entre chaque impulsion, l'antenne et le circuit électronique sont mis à l’écoute de l’impulsion de retour. On calcule la distance entre le radar et la précipitation par la relation suivante:
 (c = vitesse de la lumière = 299 792,458 km/s).
(c = vitesse de la lumière = 299 792,458 km/s).
La distance maximale qu'on peut sonder sans ambiguïté dépend du
 utilisé entre deux impulsions subséquentes. En effet, la position de tout retour qui arrive d'une première impulsion, APRÈS que soit partie une seconde impulsion, sera mal interprétée comme revenant de cette dernière.
utilisé entre deux impulsions subséquentes. En effet, la position de tout retour qui arrive d'une première impulsion, APRÈS que soit partie une seconde impulsion, sera mal interprétée comme revenant de cette dernière.Vitesse
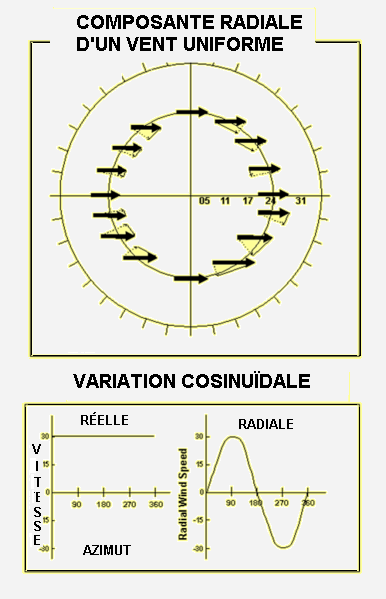
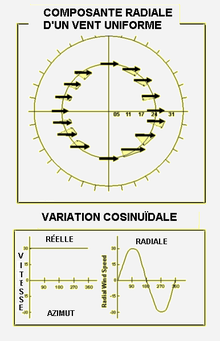 Projection du déplacement réel de cibles (flèches grasses) sur la composante radiale au radar (pointillés) selon la direction de visée sur 360 degrés.
Projection du déplacement réel de cibles (flèches grasses) sur la composante radiale au radar (pointillés) selon la direction de visée sur 360 degrés.La différence de fréquence entre le faisceau émis et celui retourné est due à l'effet Doppler de telle sorte que les cibles se rapprochant donneront une fréquence apparente plus élevée alors que les cibles s'éloignant de l'émetteur restitueront une fréquence apparente plus basse. Toute cible se déplaçant tangentiellement au radar ne produira aucune variation de fréquence.
Le déplacement d'une cible pouvant être décomposée en portion parallèle et tangentielle, la variation mesurée n'est donc pas nécessairement reliée à la vitesse réelle mais seulement à celle de la composante radiale du déplacement (cosinus du déplacement par rapport à l'axe du faisceau). Cette vitesse radiale de la cible peut être estimée en déterminant le glissement de fréquence moyen de la porteuse à l'intérieur d'un groupe d'impulsions. En général, on utilise pour cela, soit une transformée de Fourier rapide, soit la technique de l'autocorrélation. La transformée est effectuée de façon indépendante pour chaque échantillon en utilisant des données reçues à la même distance à partir de toutes les impulsions d'un paquet ou d'un groupe de paquets. Dans les systèmes plus anciens on utilisait une série de filtres analogiques.
La cible doit être soit entrante vers le radar, soit sortante sinon les données obtenues seront classées dans un dossier réservé aux signaux mal ou pas interprétés. Si les informations de vitesse proviennent d'un seul radar, elles conduiront à sous-estimer la vitesse réelle. Une interprétation exacte du profil de la vitesse pour des cibles uniques nécessite la mise en œuvre de plusieurs radars situés à des endroits différents pour déterminer l'angle d'incidence. Dans le cas de cibles volumiques, comme la précipitation, se déplaçant à l'unisson et qui recouvrent une bonne partie de la zone couverte par un radar, une analyse des vitesses radiales sur 360 degrés autour d'un seul radar permet de déduire la vitesse et la direction de ces cibles en éliminant l'indétermination.
La vitesse radiale de la cible peut être facilement calculée dès lors que l'on connait la fréquence du radar (f), la vitesse de la lumière (c), la fréquence de répétition des impulsions (PRF) et le décalage moyen en fréquence (
 ).
).Démodulation du signal
L'image reçue finale est formée par des filtres de vitesse doppler ou des circuits de traitement numérique du signal. La plupart des radars doppler pulsés modernes possèdent un étage de démodulation du signal entrant qui centre la fréquence sur zéro, en retirant la fréquence porteuse, avant l'échantillonnage numérique. Ceci a pour effet de diminuer la puissance de calcul nécessaire (le taux d'échantillonnage étant réduit d'autant) et la capacité de stockage. Le signal résultant est souvent appelé IQ-data où IQ signifie « en phase » et « en quadrature de phase » pour rappeler que le signal est représenté par un nombre complexe avec une partie réelle et une partie imaginaire.
Par exemple, un signal modulé S(t) = cos(ω0t + ϕ(t)) pourra être démodulé en utilisant :
- IH(t) = S(t).cos(ω0t) et QH(t) = S(t).sin(ω0t)
En utilisant un filtre passe-bas à la fois sur IH(t) et QH(t) on obtiendrait :
- I(t) = cos(ϕ(t) + Φ) et Q(t) = sin(ϕ(t) + Φ)
Notons que I(t) seul ne serait pas suffisant car le signe resterait indéterminé. Avec I(t) et Q(t) le radar peut discriminer les vitesses doppler entrantes et sortantes.
Erreurs et décisions
Cohérence
Pour qu'un radar Doppler pulsé fonctionne, il est indispensable que les échos reçus soient cohérents avec la porteuse, au moins le temps que tous les échos soient reçus et traités. Pour cela il existe plusieurs techniques. La plus immédiate est que le signal de l'émetteur soit généré par un oscillateur ultra–stable (le Coho) et que le signal reçu soit démodulé par un autre oscillateur ultra–stable (le Stalo) sur lequel la phase est verrouillée. Le déplacement Doppler peut alors être déterminé avec précision en comparant les différentes fréquences des échos avec les fréquence du signal émis.
Ambiguité
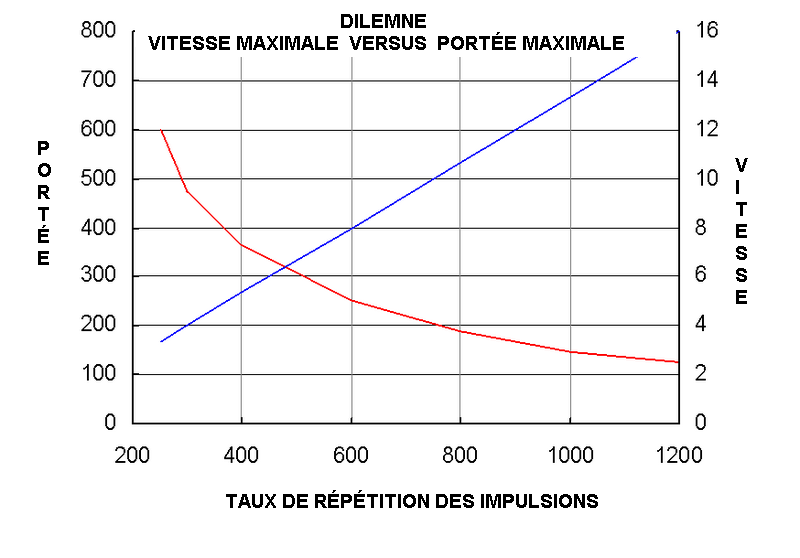
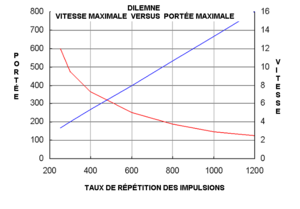 La portée maximale et la vitesse Doppler maximale non ambiguë varient de façon inverse (rouge pour la portée et bleu pour la vitesse maximale)
La portée maximale et la vitesse Doppler maximale non ambiguë varient de façon inverse (rouge pour la portée et bleu pour la vitesse maximale)Un des principaux problèmes du radar Doppler pulsé est l'ambigüité sur la vitesse étant donné que le décalage Doppler devient crénelé lorsqu'il croise la raie qui suit dans le spectre des fréquences. Ce problème peut cependant être réduit en augmentant la fréquence de répétition des impulsions (PRF), ce qui augmente la distance entre deux raies adjacentes dans le spectre émis et autorise ainsi de plus grands décalages avant que le crénelage apparaisse. Dans les radars à usage militaire conçus pour mesurer des vitesses très élevées de cibles entrantes les fréquences de répétition des impulsions sont de plusieurs centaines de kilohertz.
Cependant il y a une limite à l'augmentation de la fréquence de répétition des impulsions au-delà de laquelle apparait une ambigüité sur la distance[1] de la cible. Pour éviter ce nouveau problème, on peut utiliser de très hautes vitesses de répétition des impulsions en émettant des paquets d'impulsions avec des valeurs de fréquence de répétition différentes car, dans ce cas, la valeur exacte de la vitesse reste fixe alors que les « vitesses fantômes » dues au crénelage varient avec la fréquence des impulsions.
Commentaires sur les applications
Types de radar
La vitesse maximale qui peut être mesurée sans ambigüité est limitée par la fréquence de répétition des impulsions comme on l'a vu ci-dessus. La valeur de cette fréquence de répétition doit, par conséquent, être choisie judicieusement selon que l'on privilégie une meilleure résolution de la vitesse, ou une meilleure plage de mesure en termes de distance de la cible. Ce choix dépend essentiellement de l'application, par exemple, les radars météorologiques mesurent des vitesses qui n'ont rien à voir avec celle d'un missile.
Cibles en mouvement
Les cibles fixes — comme des immeubles — seront les plus nombreuses dans les décalages Doppler les plus faibles, alors que les cibles en mouvement induiront des décalages Doppler importants. Le système de traitement du signal du radar doit être conçu pour masquer les cibles fixes en utilisant des filtres Doppler analogiques ou numériques autour de la raie centrale du spectre. Seuls apparaitront les cibles en mouvement par rapport au radar. Si le radar est lui-même en mouvement, dans un avion de combat ou de surveillance par exemple, le traitement sera plus sophistiqué car il devra tenir compte de la vitesse de l'avion, de la vitesse relative du sol sous le radar, de l'angle de dépression de l'antenne[2] et de son l'angle de rotation.
Bibliographie
- (en)Hamish Meikle, Modern Radar Systems. (ISBN 0-86341-172-X)
- (en) Gaspare Galati, Advanced Radar Techniques and Systems. (ISBN 1-58053-294-2)
Voir aussi
- Radar Doppler (non pulsé, utilisé dans les systèmes de navigation)
- Radar météorologique (pulsé avec traitement Doppler)
- Crénelage - la cause de l'ambigüité de vitesse
Notes et références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Pulse-Doppler radar » (voir la liste des auteurs)
- L'ambigüité sur la distance apparait quand la distance de la cible est suffisamment grande pour que le temps de retour d'un écho devienne plus long que la période inter–impulsions. Dans ce cas, une cible apparaît plusieurs fois à des distances différentes.
- Angle de dépression : angle défini par l'axe principal du faisceau radar et le plan horizontal de la plate-forme. Cet angle est complémentaire de l'angle d'irradiation.
Liens externes
- (en) Doppler radar présentation mettant en relief les avantages de la technique de l'autocorrélation.
- (en) Pulse-Doppler radar polycopié de Introduction to Principles and Applications of Radar, cours à l'Université de l'Iowa.
 Portail de la physique
Portail de la physique Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique
Catégorie :- Type de radar


Wikimedia Foundation. 2010.