- LIDAR
-
Lidar
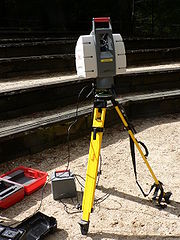 Ce lidar balaye son champ de vision avec son faisceau laser et mesure pour chaque point balayé la distance entre le lidar et le point, permettant la reconstruction d'un modèle tridimensionnel de la scène. Il peut ainsi être utilisé pour des relevés de bâtiments, de formations rocheuses, etc.
Ce lidar balaye son champ de vision avec son faisceau laser et mesure pour chaque point balayé la distance entre le lidar et le point, permettant la reconstruction d'un modèle tridimensionnel de la scène. Il peut ainsi être utilisé pour des relevés de bâtiments, de formations rocheuses, etc.
 FASOR, LIDAR expérimental utilisé pour exciter les atomes de sodium dans la haute atmosphère
FASOR, LIDAR expérimental utilisé pour exciter les atomes de sodium dans la haute atmosphèreLa télédétection par laser aéroporté ou LIDAR, acronyme de l'expression anglo-saxonne « Light Detection and Ranging », désigne une technologie de télédétection ou de mesure optique basée sur l'analyse des propriétés d'une lumière laser renvoyée vers son émetteur.
La méthode la plus répandue pour déterminer la distance à un objet est basée sur le laser à impulsions. A la différence du radar basé sur un principe similaire, le lidar utilise de la lumière au lieu d'ondes radio. La distance à un objet ou à une surface est donnée par la mesure du délai entre l'impulsion et la détection du signal réfléchi. Le LIDAR a des applications en archéologie, géographie, géologie, géomorphologie, sismologie, télédétection et physique de l'atmosphère (dont étude de la pollution de l'air) [1].
Sommaire
Autres termes
« ALSM » (Airborne Laser Swath Mapping) et « laser altimétrique » sont parfois utilisés comme synonyme de LIDAR.
L'acronyme « LADAR » (LAser Detection And Ranging) est plutôt utilisé dans le domaine militaire.
Le terme « Radar laser » est également utilisé, mais improprement, car le LIDAR utilise la lumière laser (visible et infrarouge) et non les ondes radio utilisées par les radars conventionnels.
Histoire
Les premières mesures lidar ont été effectuées en mai 1962 (voir [Smullin and Fiocco, 1962], ainsi que la première page du New York Time, datée du 11 mai 1962). Ces dernières furent effectuées par L.D. Smullin et son thésard G. Fiocco, afin de vérifier les possibles applications du laser à rubis récemment développé par Ted Maiman en 1960, utilisé en tant que télémètre, afin de mesurer la distance Terre-Lune (Project Luna See, aussi appelé ironiquement lunacy, montrant le peu de crédibilité de ce projet au départ). Georgio Fiocco et L.D. Smullin, obtinrent les premiers échos lidar de la surface lunaire, pendant trois nuits de mai 1962. Ce projet fut un incontestable succès.
Principe
 Animation du 2D balayage LIDAR
Animation du 2D balayage LIDARSon fonctionnement est le même que celui du radar, la différence étant le domaine spectral dans lequel il travaille et le type de faisceau utilisé : alors que le radar fonctionne dans le domaine des ondes radio, le lidar couvre en particulier le domaine du visible, et également les domaines ultraviolet (UV) et infrarouge (IR), d'autre part, le lidar utilise un faisceau laser, tandis que le radar utilise un faisceau électromagnétique classique, non polarisé.
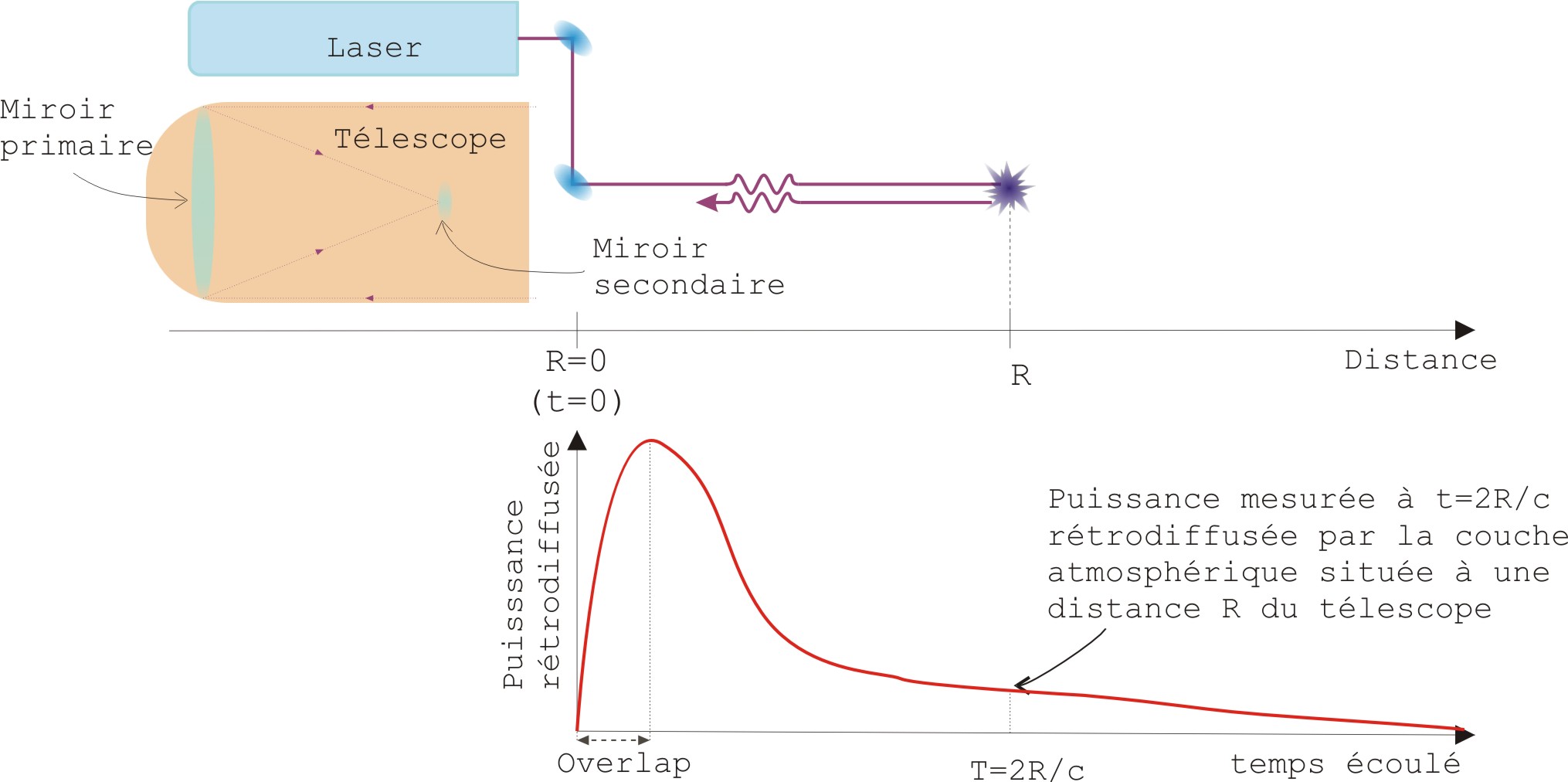
Un lidar se compose d'un système laser chargé d'émettre l'onde lumineuse, d'un télescope qui récoltera l'onde rétrodiffusée par les particules rencontrées, et d'une chaîne de traitement qui quantifiera le signal reçu.
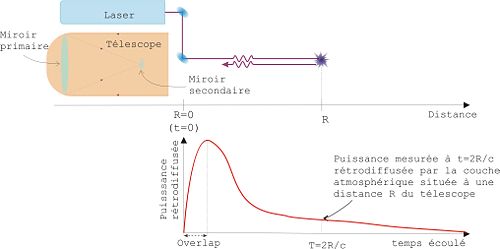 Principe de la mesure Lidar
Principe de la mesure LidarLe laser émet une onde lumineuse. Elle interagit avec les différents composants qu’elle rencontre. Une partie de cette onde est rétrodiffusée et collectée par le télescope. À partir de cette composante rétrodiffusée, on peut alors déduire des informations quant au diffuseur (sa concentration par exemple) et sa distance par rapport au système de mesure.
Lors de la propagation de l’onde émise par le lidar, on peut envisager deux types de diffusions par les composants rencontrés :
- Une diffusion élastique : elle se produit sans échange d’énergie entre les photons incidents et la molécule rencontrée. Le photon est alors diffusé sans changement de fréquence. C’est le cas de la diffusion Rayleigh (lorsque la taille du diffuseur est largement inférieure à la longueur d’onde utilisée) ou de celle de Mie (lorsque la taille du diffuseur est du même ordre de grandeur que la longueur d’onde utilisée).
- Une diffusion inélastique, beaucoup plus faible, appelée aussi diffusion Raman. Celle-ci est à l’origine d’un décalage de la fréquence de l’onde incidente νr. Les photons sont alors diffusés selon 2 fréquences : ν0 + νr (décalage vers les hautes fréquences - correspond aux raies appelée « raies anti-Stockes ») et ν0 − νr (décalage vers les basses fréquences - correspond aux raies appelées « raies Stockes »). Ce décalage de fréquence est caractéristique de la molécule rencontrée et permet donc de la discriminer.
Équation Lidar
L'expression de la distribution verticale du signal lidar rétrodiffusé est donné par l'équation suivante (Collis and Russel, 1976) pour un faisceau laser de longueur d'onde donné :
![P(z) = K F_0 \beta(z) \frac{A}{z^2} \left[ -2 \int_0^z \alpha(z')dz' \right]](/pictures/frwiki/98/be650570086e712f8c23e3d513cd43f6.png)
- K est une constante instrumentale, prenant en compte les éléments optiques et électroniques qui composent la chaîne de traitement de l'énergie lumineuse rétrodiffusée ;
- F0 représente l'énergie initiale du faisceau (en J.s − 1);
- A est l'aire du récepteur en m2;
- α(z) représente le coefficient d'extinction total (absorption+atténuation) à l'altitude z en m − 1;
- β(z) représente le coefficient de rétrodiffusion à l'altitude z en m − 1sr − 1.
P a la dimension d'une puissance (J.s − 1 ou W).
Rapport de dépolarisation
De nombreux systèmes lidar récents sont équipés d'un dispositif sensible à la polarisation lumineuse. Dans ces systèmes, l'onde laser émise est polarisée linéairement dans un plan appelé plan parallèle. L'énergie lumineuse rétrodiffusée par les composants atmosphériques, et détectée par le télescope du lidar, n'est souvent plus polarisée linéairement. On quantifie la modification de l'état de polarisation lumineuse par le rapport de dépolarisation
 , avec
, avec  et
et  les énergies lumineuses détectées dans les plans respectivement parallèle et perpendiculaire au plan d'émission.
les énergies lumineuses détectées dans les plans respectivement parallèle et perpendiculaire au plan d'émission.Le rapport de dépolarisation est une mesure extrêmement utile car elle permet de distinguer facilement la phase d'un nuage détecté : les gouttelettes d'eau composant un nuage d'eau liquide, de par leur forme sphérique, produisent un rapport de dépolarisation nul (δ = 0) ; en revanche, les cristaux de glace composant un Cirrus produisent des rapports de dépolarisation élevés de l'ordre de 0.2 < δ < 0.8.
Représentation graphique
Les observations lidar sont principalement représentées sous deux formes :
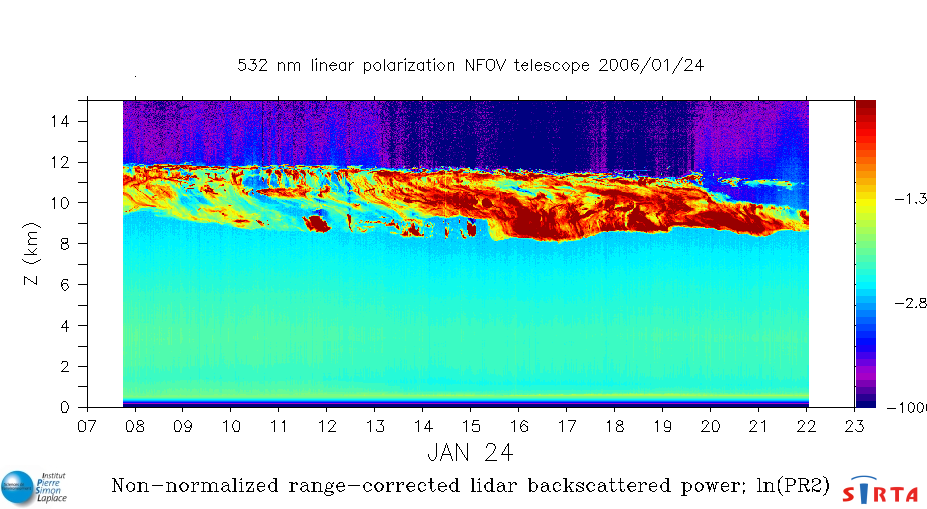
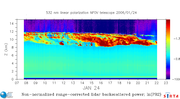 Série temporelle lidar
Série temporelle lidar- Un profil lidar est une figure simple en 2 dimensions, représentant l'évolution du signal lidar en abscisse en fonction de l'altitude en ordonnée.
- Une série temporelle (appelée aussi RHI pour Range-Height-Indicator) est un carte couleur en 2 dimensions, où les intensités du signal lidar sont codées à la fois en fonction du temps (en abscisse) et de l'altitude (en ordonnée) par une couleur appartenant à une échelle d'intensité.
Utilisation
Ses domaines d'utilisation sont multiples : météorologie: détection de la force et de la direction du vent par effet Doppler, étude de l'atmosphère (aérosols, vapeur d'eau, ozone), réalisation de Modèles Numériques de Terrain...
Voir aussi
Articles connexes
- Effet Doppler
- Laser
- Radar, Sonar
- Maser
- Télédétection
- Radôme
- CALIPSO, un lidar embarqué sur satellite, en vol depuis avril 2006, coopération NASA-CNES
Références
- ↑ Cracknell Arthur P. Hayes Ladson, Introduction to Remote Sensing, London, Ed : Taylor and Francis, 1991, ISBN:0849392551
Liens externes
- Exemple de cartographie du relief du sol forestier (mesure sous canopée)
 Portail de la physique
Portail de la physique Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique
Catégories : Optique ondulatoire | Laser | Instrument de mesure météorologique


Wikimedia Foundation. 2010.