- Radar Météorologique
-
Radar météorologique
Un radar météorologique est un type de radar utilisé en météorologie pour repérer les précipitations, calculer leur déplacement et déterminer leur type (pluie, neige, grêle, etc.). La structure tridimensionnelle des données obtenues permet également d'inférer les mouvements des précipitations dans les nuages et ainsi de repérer ceux qui pourraient causer des dommages. Enfin, les précipitations servant de traceurs, on peut en déduire la direction et la vitesse des vents dans la basse atmosphère.
 Tour et pose du radôme du nouveau radar météorologique de King City, Canada. (Source : Environnement Canada)
Tour et pose du radôme du nouveau radar météorologique de King City, Canada. (Source : Environnement Canada)
Histoire
Article détaillé : Histoire du radar.En 1864, James Clerk Maxwell décrit les lois de l’électromagnétisme ce qui permet pour la première fois de travailler sur leur source. En 1889, Heinrich Rudolf Hertz montre que les ondes électromagnétiques sont réfléchies par les surfaces métalliques. Dans les premières décennies du XXe siècle siècle, plusieurs inventeurs, scientifiques, et ingénieurs de divers pays ont contribué au développement du radar, juste à temps pour le début de la Seconde Guerre mondiale. Durant le conflit, les opérateurs des radars micro-ondes des armées alliées remarquèrent de la contamination qui s’avéra être des échos venant de la précipitation (pluie, neige , etc.). Juste après la guerre, les scientifiques militaires, qui avaient déjà commencé leur recherche sur les phénomènes rapportés, ont continué leur travail tant dans la vie militaire que civile.
Aux États-Unis, David Atlas est un des pionniers de la météorologie radar pour le groupe de l’armée de l’air et plus tard avec le Massachusetts Institute of Technology[1]. Il a participé au développement des premiers radars météorologiques opérationnels. Au Canada, J. Stewart Marshall et R.H. Douglas forment le « Stormy Weather Group » à l’Université McGill de Montréal[2]. Marshall et son étudiant Walter Palmer sont reconnus pour avoir travaillé sur la distribution du diamètre des gouttes dans les précipitations ce qui a mené à la relation entre la réflectivité (Z), le retour d’intensité de la précipitation, et le taux de précipitation (R) au sol communément appelé relation Z-R. En Grande-Bretagne, les recherches se poursuivirent pour relier les signatures des échos aux caractéristiques des précipitations et sur les possibilités qu’offrent les différentes longueurs d'onde entre 1 et 10 centimètres.
Entre 1950 et 1980, les différents services de météorologie à travers le monde construisent des radars météorologiques pour suivre la précipitation par sa réflectivité. D’abord ces radars furent pour usage local dans les grands centres et avec un nombre limité d’angles. Ils étaient opérés en temps réel par les météorologistes qui devaient suivre les échos sur des écrans cathodiques. En 1953 Donald Staggs, un ingénieur en électricité travaillant pour le Illinois State Water Survey, est le premier à noter sur les sorties de réflectivité le crochet typique associé à un orage tornadique[3].
Dans les années 1970, les différents radars commencent à être organisés en réseaux avec un début de standardisation. Les premiers systèmes de capture des images ont été développés. Le nombre d’angles sondés augmente ce qui permet d’obtenir un volume de données en trois dimensions. Les coupes horizontales (CAPPI) et verticales sont développées. On étudie ainsi la structure des orages et autres nuages (entre autres par Isztar Zawadski). Les groupes de recherche se sont multipliés à travers le monde, en particulier le NSSL aux États-Unis en 1964, qui commencent à expérimenter sur la variation de la polarisation du signal radar ainsi que sur l’utilisation de l’effet Doppler.
Entre 1980 et 2000, les réseaux de radars météorologiques se généralisent en Amérique du Nord, en Europe, au Japon et dans certains autres pays. Les radars conventionnels sont remplacés par des radars pouvant détecter non seulement l’intensité des précipitations mais également leur vitesse de déplacement (effet Doppler). Aux États-Unis, l’implantation de ces radars de longueur d’onde de 10 cm appelé NEXRAD ou WSR-88D commence en 1988 et se termine au début des années 90. Au Canada, le premier radar Doppler est celui de King City, au nord de Toronto, en 1985. Il est construit pour tester le concept avec une longueur d'onde de 5 cm[4]. Le second sera celui de 10 cm de l'Université McGill en 1993 . Le réseau canadien de radars météorologiques est modernisé au complet à partir de 1998. La France (réseau ARAMIS) et les autres pays européens se convertissent à la fin des années 1990 et après 2000. En Australie, quelques radars de recherche sont construits à la fin des années 1990 et début 2000 mais ce n'est qu'en 2003 qu'un programme pour renouveler le réseau national réserve certains sites pour des radars avec fonction Doppler[5].
Le développement fulgurant de l’informatique permet de traiter les données radars en temps réel pour faire une multitude de produits directs (CAPPI, PPI, cumul de précipitations, etc.) mais également des algorithmes qui permettent de repérer les précipitations dangereuses (orages, pluie diluvienne, rafales sous les nuages, etc.) et de prévoir à court terme leur déplacement.
Après 2000, les recherches qui ont été effectuées sur la double polarisation du signal radar commencent à trouver des applications pratiques dans la détection du type de précipitations. La France[6], le Canada, les États-Unis, l’Australie et d’autres ont transformé certains de leur radars pour utiliser ce concept en mode pré-opérationnel. Des recherches sont en cours depuis 2003 pour utiliser des antennes réseau à commande de phase assemblés en radar tridimensionnel à balayage électronique pour remplacer le sondage mécanique en balayage électronique, donc plus rapide.
Principes du radar météorologique
Un radar météorologique est un radar à impulsions, c'est-à-dire qu'il émet des impulsions de très courte durée suivi d'un temps mort beaucoup plus long pour « écouter » les échos de retour venant des précipitations. On peut ainsi repérer la position, l'intensité et le déplacement de ces dernières. On peut même tirer le type du signal retourné, si on sait quelles variables de l'écho analyser. Voici donc la façon dont on procède.
Émission
 Trajectoire du faisceau radar et volume sondé.
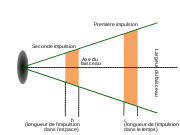
Trajectoire du faisceau radar et volume sondé.Une impulsion électromagnétique est produite par un oscillateur (magnétron, klystron ou autre) électronique. Elle est envoyée à travers un tube guide d’onde à une antenne parabolique qui l’émet vers la précipitation. Chaque impulsion a une certaine largeur qui dépend des caractéristiques de l'antenne et une certaine profondeur qui dépend de sa durée (de l’ordre de la microseconde).
Ainsi, une impulsion sonde un volume de l'atmosphère qui augmente avec la distance au radar comme
 (h : largeur de l'impulsion, r la distance au radar et θ l'angle d’ouverture du faisceau). On voit sur l'image de droite le volume qu'occupent deux impulsions parties à des temps différents d'un radar. Avec les dimensions typiques d'un faisceau radar, le volume sondé varie donc de 0,001 km³ près du radar, jusqu'à 1 km³ à 200 km de celui-ci. Il s'agit du «volume radar»[7]
(h : largeur de l'impulsion, r la distance au radar et θ l'angle d’ouverture du faisceau). On voit sur l'image de droite le volume qu'occupent deux impulsions parties à des temps différents d'un radar. Avec les dimensions typiques d'un faisceau radar, le volume sondé varie donc de 0,001 km³ près du radar, jusqu'à 1 km³ à 200 km de celui-ci. Il s'agit du «volume radar»[7]Rétrodiffusion
Article détaillé : Équation du radar.Lorsqu'une impulsion entre dans une zone de précipitations, une petite partie est rétrodiffusée (réfléchie) vers le radar pendant que le reste continue. Ce retour est le total des retours de toutes les gouttes dans le volume sondé et l'équation du radar pour cibles volumiques en régit l'intensité[7]. On voit donc que si le volume est rempli de cibles, on obtient une moyenne de leur intensité mais que s'il n'est que partiellement rempli, on sous-estimera celle-ci en incluant des zones sans échos.
Comme le volume augmente avec la distance, cette sous-estimation deviendra de plus en plus probable. Finalement, quelle que soit l'intensité du retour, il va diminuer inversement à
 ce qui fait qu'on doit normaliser les retours, c'est-à-dire qu'on doit les multiplier par ce facteur pour faire comme s'ils revenaient tous du même endroit.
ce qui fait qu'on doit normaliser les retours, c'est-à-dire qu'on doit les multiplier par ce facteur pour faire comme s'ils revenaient tous du même endroit.Position
 Calcul de la hauteur des échos.
Calcul de la hauteur des échos.Entre chaque impulsion, l'antenne et le circuit électronique sont mis à l’écoute de l’impulsion de retour. On calcule la distance entre le radar et la précipitation par la relation suivante:
 (c = vitesse de la lumière = 299 792,458 km/s).
(c = vitesse de la lumière = 299 792,458 km/s).
La distance maximale qu'on peut sonder sans ambiguïté dépend du
 utilisé entre deux impulsions subséquentes. En effet, la position de tout retour qui arrive d'une première impulsion, APRÈS que soit partie une seconde impulsion, sera mal interprétée comme revenant de cette dernière. En général, on utilise un temps d'écoute de l’ordre de 1 milliseconde, soit mille fois la durée de l'impulsion. Cela permet une portée maximale utile d'environ 250 km.
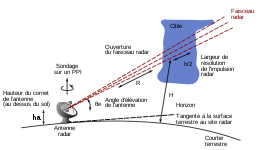
utilisé entre deux impulsions subséquentes. En effet, la position de tout retour qui arrive d'une première impulsion, APRÈS que soit partie une seconde impulsion, sera mal interprétée comme revenant de cette dernière. En général, on utilise un temps d'écoute de l’ordre de 1 milliseconde, soit mille fois la durée de l'impulsion. Cela permet une portée maximale utile d'environ 250 km.En plus de la distance, on peut calculer la hauteur au-dessus du sol où se trouvent les cibles. Cela se calcule en connaissant l’angle d’élévation du radar et la courbure de la Terre. Il faut également tenir compte de la variation de la densité des couches de l’atmosphère. En effet, le faisceau radar ne se propage pas en ligne droite comme dans le vide mais suit une trajectoire courbe à cause du changement de l’indice de réfraction avec l'altitude.
La formule pour trouver cette hauteur est[8] :
Où r = distance, ke = 4/3, ae = rayon de la Terre, θe : angle d’élévation, ha : hauteur du cornet au-dessus de la surface de la Terre.
- Résolution
On considère qu'on ne peut résoudre distinctement deux zones de précipitations que si elles sont éloignées de plus de h / 2 en portée et/ou de la moitié de la largeur du faisceau en azimut (voir Compression d'impulsion)[9].
Stratégie de sondage
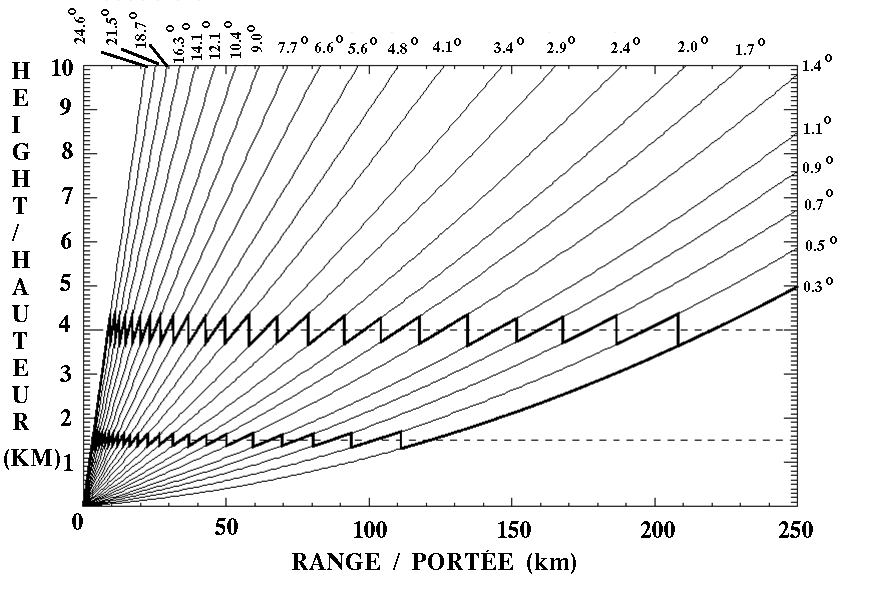
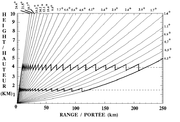 Angles typiquement sondés au Canada. Les lignes en zig-zag représentent les données de deux CAPPI à 1,5 et 4 km d'altitude.
Angles typiquement sondés au Canada. Les lignes en zig-zag représentent les données de deux CAPPI à 1,5 et 4 km d'altitude.Après avoir effectué une rotation complète à un angle d’élévation donné, l’antenne parabolique sera haussée à un angle supérieur et effectuera une autre rotation. Ce scénario se répétera sur plusieurs angles de telle façon que le radar effectuera un balayage en trois dimensions de l’atmosphère en 5 ou 10 minutes. On aura ainsi une idée des précipitations depuis un niveau près du sol jusqu’à environ 15 à 20 km d’altitude et sur 250 km de distance.
À cause de la courbure de la Terre et du changement d’indice de réfraction de l’air dont nous venons de parler, le sondage ne pourra pas « voir » sous une certaine hauteur qui dépend de la distance au radar et de l’angle minimal utilisé. Il ne pourra également pas « voir » plus près du radar que la trajectoire de l’angle maximal utilisé. La figure à gauche montre la hauteur versus la distance d’une série d’angles typiquement utilisés par un radar météorologique canadien, ces angles vont de 0,3 à 25 degrés.
Chaque pays détermine le nombre et les angles d'élévation utilisés selon ses besoins spécifiques. Plusieurs pays utilisent un nombre limité d'angles à relativement bas niveau pour obtenir le meilleur estimé des quantités de pluie tombée alors que les pays où les orages sont prédominants vont augmenter la couverture verticale. Le type de radar, la longueur d'onde et la fréquence de production d'images sont également des facteurs qui dictent le nombre d'angles sondés.
Types de données
Réflectivité
Calcul en décibel (dBZ)
L’écho de retour réfléchi par les cibles est également analysé pour son intensité afin d’établir le taux de précipitation dans le volume sondé. On utilise une longueur d’onde radar entre 1 et 10 cm afin que le retour agisse selon la loi de Rayleigh, c'est-à-dire que l'intensité de retour est proportionnelle à une puissance du diamètre des cibles en autant que celles-ci (pluie, flocons, etc.) soient beaucoup plus petites que la longueur d’onde du faisceau radar. C’est ce qu’on nomme la réflectivité (Z). Cette intensité varie en fait comme la 6e puissance du diamètre des cibles de diamètre D (le sixième moment) multiplié par la distribution des gouttes de pluie (N[D] de Marshall-Palmer) ce qui donne une fonction Gamma tronquée[10] :
Ce Z est en mm6m − 3, ce qui donne des unités plutôt inhabituelles. De plus, cette formule ne tient pas compte de la nature de la cible. Pour obtenir la réflectivité équivalente (Ze) que voit le radar, on doit normaliser et multiplier par le carré de la constante diélectrique (K) de la cible pour tenir compte de son efficacité à réfléchir.
- La variation de diamètre et la constante diélectrique entre les différents types de précipitations (pluie, neige, bruine, grêle, etc.) est très grande et la réflectivité équivalente est donc exprimée en dBZ (10 fois le logarithme du rapport ou décibel Z)
- L’antenne tourne sur son axe à un angle d’élévation donné mais émet un grand nombre d’impulsions dans chaque angle de visée. La réflectivité équivalente revenant de chaque impulsion pour chacun des volumes de cibles est donc notée pour calculer une intensité moyenne de sondage pour ce volume.
Transformation en taux de précipitations
Comme ce qu'on obtient au sol est une quantité de précipitations, on veut trouver la relation entre la réflectivité équivalente et ce qu'on mesure. Le taux de précipitation (R) est égal au nombre de particules, leur volume et leur vitesse de chute (v[D]):
On voit donc que Ze et R ont une formulation similaire et en résolvant les équations on arrive à une relation, dite Z-R[11], du type:

 Où a et b dépendent du type de précipitations (pluie,neige, convective ou stratiforme) qui ont des Λ, K, N0 et v différents
Où a et b dépendent du type de précipitations (pluie,neige, convective ou stratiforme) qui ont des Λ, K, N0 et v différents
La plus connu de celle-ci est la relation Z-R de Marshall-Palmer qui donne a=200 et b=1,6[12]. Elle est encore l'une des plus utilisée car elle est valide pour de la pluie synoptique dans les latitudes moyennes, un cas très fréquent. D'autres relations ont été trouvées pour des situations de neige, de pluie sous orage, pluie tropicale, etc[12].
Vitesse Doppler
Articles détaillés : Radar Doppler pulsé et Effet Doppler-Fizeau.Radar pulsé
À proprement parler, la différence de fréquence générée, selon l'effet Doppler traditionnel, par le déplacement des gouttes de pluie ou les flocons de neige est trop petite pour être notée par l'instrumentation électronique actuelle. En effet, les fréquences utilisées sont de l'ordre de 109 Hz (longueurs d'onde 5 à 10 cm) et les vitesses des cibles de 0 à 70 m/s ce qui donne un changement de fréquence de seulement 10-5%. On utilise donc à la place la différence de phase entre deux impulsions successives revenant d'un même volume sondée (paire d'ondes pulsées). Entre chaque impulsion, les cibles se déplacent légèrement créant cette différence de phase. L'intensité d'une impulsion après un aller-retour est donnée par :
 Différence de phase entre deux ondes revenant d'une cible ayant bougé.
Différence de phase entre deux ondes revenant d'une cible ayant bougé.
L'intensité d'une impulsion subséquente revenant du même volume sondé mais où les cibles ont légèrement bougé est donnée par:

Donc

Dilemme Doppler
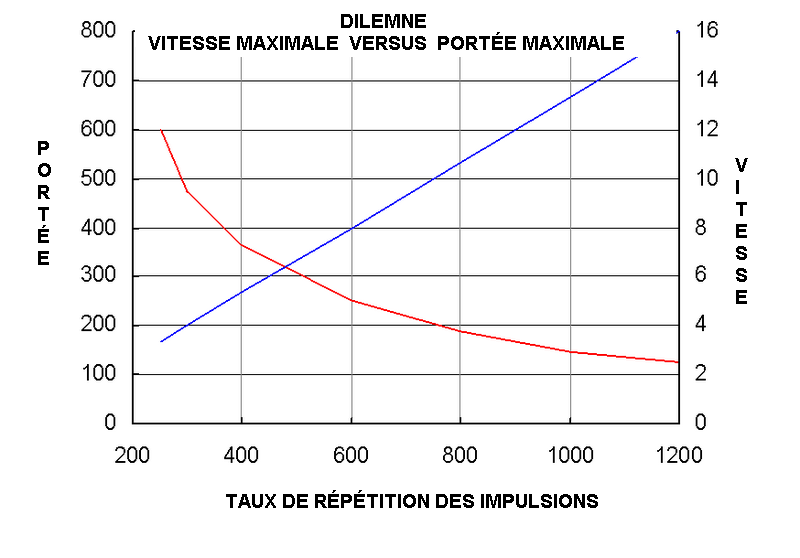
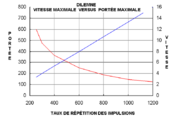 La portée maximale et la vitesse Doppler maximale non ambiguë varient de façon inverse (rouge pour la portée et bleu pour la vitesse maximale).
La portée maximale et la vitesse Doppler maximale non ambiguë varient de façon inverse (rouge pour la portée et bleu pour la vitesse maximale).Regardons maintenant la vitesse maximale qu'on peut mesurer sans ambiguïté. Comme l'angle
 ne peut varier qu'entre -π et +π, on ne peut noter une vitesse supérieure à:
ne peut varier qu'entre -π et +π, on ne peut noter une vitesse supérieure à:C'est ce qu'on appelle la vitesse de Nyquist. Pour obtenir une meilleure détermination de la vitesse des cibles, il faut envoyer des impulsions très rapprochées, donc avec
très petit. Mais on sait également que la portée en réflectivité estce qui demande un grand Δt pour être sûr de la position des échos revenant de loin sans ambiguïté. Ce dilemme Doppler limite donc la portée utile des radars qui utilisent cet effet. Dans le tableau à droite on peut voir la variation de ces deux paramètres selon le taux de répétition des impulsions (1 / Δt). Il faut donc faire un compromis qui en général fait que les radars Doppler ont une portée utile de 100 à 150 km.
Amélioration
Certaines techniques permettent néanmoins d'étendre la vitesse maximale pour diminuer l'effet de ce fameux dilemme. Il s'agit des méthodes dites à fréquences de répétitions multiples (multiple PRF en anglais) qui consistent à émettre des impulsions à différent taux de répétitions, très proches les uns des autres, et à recombiner les vitesses Doppler individuelles correspondantes. Ainsi avec un certain taux de répétition, on obtient une vitesse pour la cible alors qu'avec un autre taux, la vitesse notée sera différente. Par simple calcul, on peut déduire la vraie vitesse et on augmente la vitesse non ambiguë finale. Avec une plage de taux d'impulsions, on augmente la vitesse maximale décelable pour une même portée maximale.
Le réseau canadien de radars météorologiques, utilisant une longueur d'onde de 5 cm, est doté de ce genre de traitement radar depuis 1999. Sans la technique, on y noterait une vitesse non ambiguë entre 11 et 15 m/s pour une portée de 150 km. En utilisant la technique avec deux taux, on obtient 48 m/s sans changer la portée maximale. Si on voulait changer cette portée, la plage de taux de répétitions utilisables serait plus basse et la vitesse maximale non ambiguë serait plus basse également, même avec cette technique.
Les radars du réseau opérationnel français ARAMIS sont équipés d'un tel schéma depuis peu (2006). Cette technique permet d'étendre la portée maximale à plus de 200 km tout en ayant une vitesse non ambiguë de l'ordre de 60 m/s (Tabary et al. 2006). Dans ce cas, on utilise trois taux de répétitions pour étendre encore plus la plage de vitesses. Mais encore là, le dilemme existe, on ne fait que changer la pente des lignes sur le graphique.
Interprétation
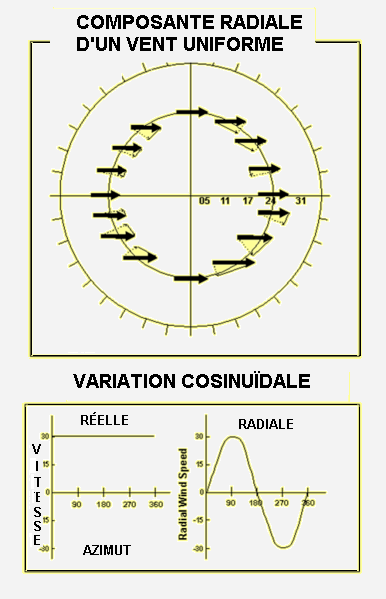
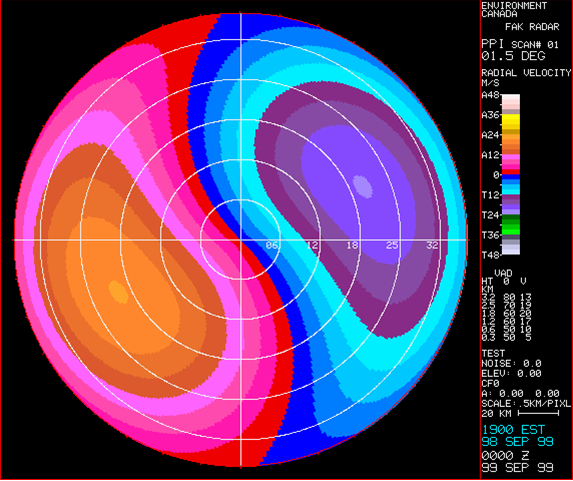
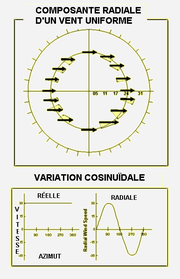 Projection du vent réel sur la composante radiale au radar selon la direction de visée sur 360 degrés.
Projection du vent réel sur la composante radiale au radar selon la direction de visée sur 360 degrés. Exemple idéalisé de sortie Doppler. Les vents s'approchant sont en bleu et ceux sortant en rouge selon la convention habituelle. Remarquez la variation sinusoïdale de la vitesse lorsqu'on se déplace sur 360 degrés le long d'un des cercles (Environnement Canada).
Exemple idéalisé de sortie Doppler. Les vents s'approchant sont en bleu et ceux sortant en rouge selon la convention habituelle. Remarquez la variation sinusoïdale de la vitesse lorsqu'on se déplace sur 360 degrés le long d'un des cercles (Environnement Canada).Cette vitesse est appelée la vitesse Doppler. Elle ne donne que la composante radiale du déplacement, dite vitesse radiale. Cependant, il est possible de déduire avec une certaine précision les vraies vitesses et directions si l'écran est suffisamment rempli de précipitations. Pensons à une pluie d'automne qui dure toute la journée et qui se déplace uniformément d'ouest en est. Le faisceau radar pointant vers l'ouest verra donc les gouttes s'approcher de lui et l'inverse quand il pointe vers l'est. Par contre, quand le radar pointe vers le nord et le sud, les gouttes ne se rapprochent, ni ne s'éloignent de lui car elles passent perpendiculairement au faisceau. Donc la vitesse notée sera nulle.
Si on se rappelle que le radar tourne sur 360 degrés, il verra donc toutes les composantes de projection de la vitesse de ces gouttes sur son axe de visée. L'ensemble des vitesses sur un tour complet prendra les valeurs d'un cosinus. Fort de cela, on peut donc déduire la direction et la vitesse des précipitations (+/- celle du vent).
On a cependant négligé la vitesse de chute des gouttes mais elle est faible pour les angles d'élévation sous 3 degrés à l'intérieur de 150 km du radar ce qui sont le plus souvent les angles recherchés. Un regard plus en hauteur doit en tenir compte.
Double polarisation
Article détaillé : Polarisation (optique).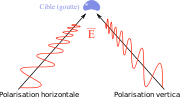 Illumination de la cible avec la double polarisation. Notez la forme de la goutte.
Illumination de la cible avec la double polarisation. Notez la forme de la goutte.En général, la plupart des hydrométéores ont un axe plus grand selon l’horizontale (ex. les gouttes de pluie deviennent oblates en tombant à cause de la résistance de l’air). L’axe dipolaire des molécules d’eau a donc tendance à s’aligner dans cette direction et le faisceau radar sera généralement polarisé horizontalement pour tirer profit d’un retour maximal.
Si on envoie en même temps une impulsion avec polarisation verticale et une autre avec polarisation horizontale, on pourra noter une différence de plusieurs caractéristiques entre ces retours :
-
- Si les cibles ont une forme aplatie comme dans l'image ci-contre, en sondant avec deux ondes dont l'une est de polarisation verticale (V) et l'autre horizontale (H), on obtient des intensités plus fortes revenant de celle ayant l'axe horizontal. Par contre si les retours orthogonaux sont égaux cela indique une cible ronde. Cela s'appelle la différence de réflectivité ou la réflectivité différentielle (Zdr) ;
- Le faisceau radar sonde un volume plus ou moins grand selon les caractéristiques de l'antenne émettrice. Ce qui revient est l'addition des ondes réfléchies par les cibles individuelles dans le volume. Comme les cibles peuvent changer de position dans le temps les unes par rapport aux autres, l'intensité des ondes V et H ne demeure constante que si les cibles ont toute la même forme. Le rapport d'intensité entre les canaux H et V revenant de sondages successifs s'appelle le coefficient de corrélation (ρhv) et donne donc une idée de l'homogénéité ou non des cibles dans le volume sondé ;
- La phase de l'onde change lorsqu'elle traverse un milieu de densité différente. En comparant le taux de changement de phase de l'onde de retour avec la distance, la phase différentielle spécifique ou Kdp, on peut évaluer la quantité de matière traversée ;
- On peut également comparer le déphasage entre les retours H et V (différentiel de phase ou φdp).
Les radars, dits à double polarisation, qui utilisent ce type de sondage peuvent donc obtenir des indications sur la forme des cibles ainsi que sur le mélange de formes. Ceci peut être utilisé, en plus de l’intensité du retour, pour une identification directe du type de précipitations (pluie, neige, grêle, etc.) grâce à un algorithme[13]. NCAR aux États-Unis, a été un des centres pionniers dans ce domaine avec Dusan S. Zrnic et Alexandre V. Ryzhkov. Le NOAA met à l'essai depuis le début des années 2000 un radar opérationnel de ce type et pense équiper tout son réseau d'ici la fin de cette décennie[14]. L'université McGill (Montréal, Canada) a également un radar qui en est équipé et dont les données sont utilisées opérationnellement par Environnement Canada[15],[16]. EC a un autre radar polarisé à King City en banlieue nord de Toronto en mode développement[17]. Finalement, Météo-France pourrait avoir ses premiers radars polarisés en 2008 et d'autres centres, comme Poldirad en Allemagne, continuent les recherches dans ce domaine.
Types principaux d'images produites
Toutes les données obtenues par le sondage radar sont affichées selon leur format. Certains produits servent à afficher plusieurs types de données alors que d'autres sont plus spécifiques.
PPI (Vue panoramique à angle d'élévation constant)
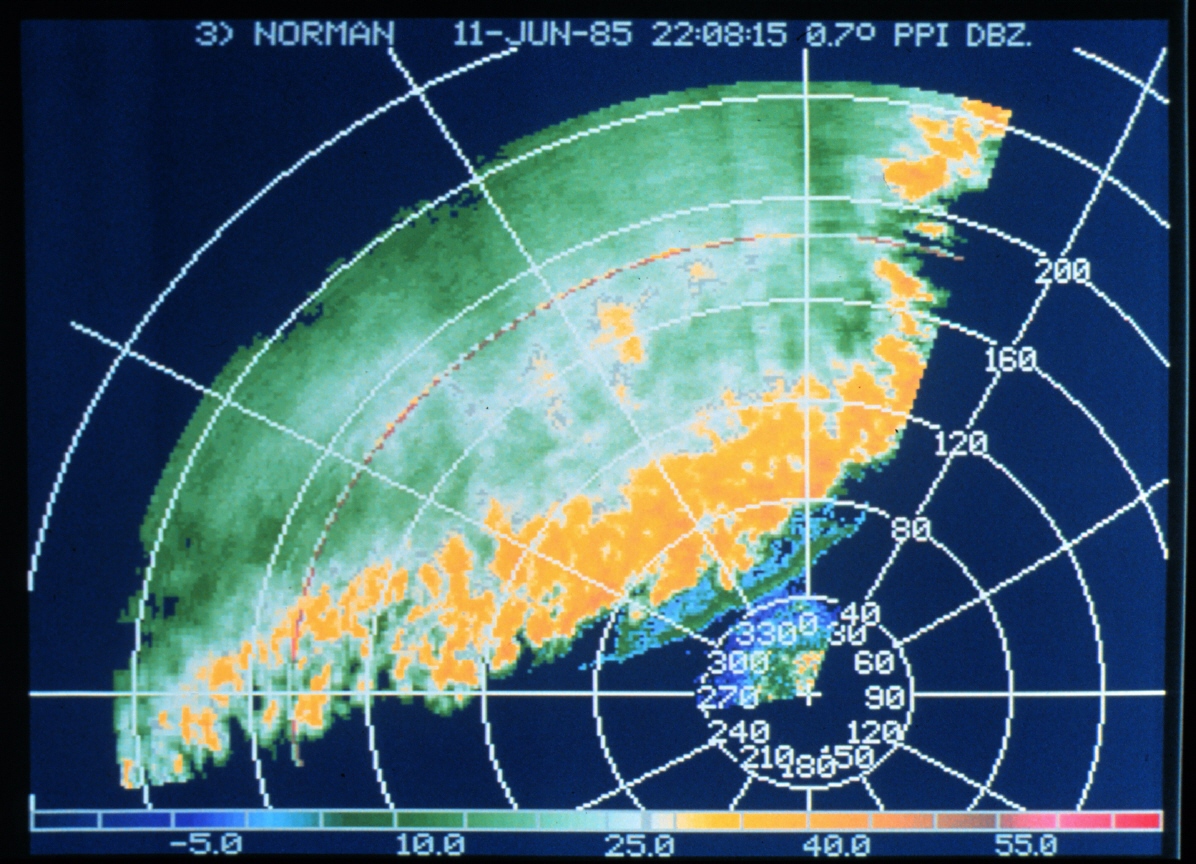
Article détaillé : Plan Position Indicator.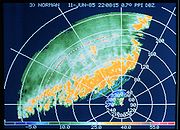 Image d'un front d'orages en réflectivité (en dBZ), vu sur PPI (NOAA).
Image d'un front d'orages en réflectivité (en dBZ), vu sur PPI (NOAA).Comme les données sondées par le radar se font un angle d'élévation à la fois, les premières images ont été celles d'un affichage panoramique des données de chaque angle individuellement (PPI). Ce type de données doit être interprété en se rappelant que le faisceau radar s'élève au-dessus du sol à mesure qu'on s'éloigne du radar. Donc ce qu'on voit près du radar est à beaucoup plus bas niveau que ce que l'on voit à 200 km.
Il en résulte qu'un nuage avec des taux de pluie élevé à 30 km du radar peut sembler diminuer ou augmenter d'intensité à mesure qu'il s'éloigne du radar. En fait, comme notre faisceau est plus haut dans le nuage au second temps, il regarde une autre section de ce dernier.
Un PPI est également affligé de retours venant du sol près du radar. Ceci donne de très forts retours qui peuvent être mal interprétés comme étant des précipitations fortes.
USAGE : Tous les types de données: réflectivité, vitesse radiale et les différents champs de polarimétrie.
CAPPI (Vue panoramique à altitude constante)
Article détaillé : Constant Altitude Plan Position Indicator.Pour pallier les problèmes du PPI, le CAPPI a été développé par les chercheurs canadiens[18]. Il s'agit en fait d'une coupe horizontale à travers l'ensemble des angles d'élévation sondés par le radar. Selon le nombre d'angles et les élévations de ceux-ci, on peut faire une coupe plus ou moins précise. Selon le niveau de notre coupe, il arrive également qu'à une certaine distance nous n'ayons plus de données à l'altitude recherchée. Ce qui est ensuite vu sur le CAPPI, ce sont les données du PPI le plus près de ce niveau.
Par exemple, sur l'image des angles plus haut en page (section stratégie de sondage), les 24 angles s'échelonnent de 0,5 à 25 degrés et nous pouvons donc faire un CAPPI à travers ces données. Les lignes grasses en dents-de-scie représentent des CAPPI à 1,5 et 4 km d'altitude. Remarquez qu'au-delà de 120 km, l'angle le plus bas passe au-dessus de 1,5 km et qu'à 200 km il dépasse le 4 km. Donc la portion des CAPPI qui sera au-delà de ces limites sera donc plutôt un PPI de l'angle le plus bas.
- Usage
Pour qu'un CAPPI donne des images relativement lisses de point en point, il faut des données sur un assez grand nombre d'angles dans la verticale afin d'éviter les trous dans la couverture verticale. De plus, il est important que le champ de données soit sans changements brusques selon la hauteur. C'est pourquoi ce sont surtout les données de réflectivité qui sont affichées sur des CAPPIs.
Les données de vitesses Doppler sont en général plus bruyantes car la direction des vents peut changer soudainement en quelques centaines de mètres d'altitude ce qui peut causer des images CAPPI en bandes si la coupe est faite autour de la hauteur de ce changment. Seule l'Université McGill (Montréal, Canada) produit régulièrement des CAPPIs Doppler[19]. Cependant, certains chercheurs l'utilisent, entre autres pour l'analyse de la circulation autour des cyclones tropicaux et pour le développement de produits NEXRAD[20].
Finalement, les données de double polarisation sont nouvelles et peuvent être également bruyantes. Aucun exemple de CAPPI de ces données n'est connu mais au moins une société en électronique radar nommée SIGMET a un logiciel qui permet de le faire[21].
- Exemples en temps réel
Carte de cumul des précipitations
 Cumul de 24 heures de la pluie selon le radar de Val d'Irène dans l'est du Québec (Canada). Remarquez les cônes sans données vers l'est et le sud-ouest causés par le blocage du faisceau par les montagnes (Source: Environnement Canada)
Cumul de 24 heures de la pluie selon le radar de Val d'Irène dans l'est du Québec (Canada). Remarquez les cônes sans données vers l'est et le sud-ouest causés par le blocage du faisceau par les montagnes (Source: Environnement Canada)Une des utilités principales des radars météorologiques est de pouvoir détecter à distance les précipitations pour des usages hydrométriques. Par exemple, les services de contrôle du débit des rivières, d’avertissement d’inondations, de planification de travaux de barrage, etc. ont tous besoin de savoir les quantités de pluie et neige qui tombent sur de larges domaines. Le radar complète idéalement un réseau de pluviomètres en étendant la prise de données sur une grande superficie, le réseau servant à son étalonnage. Ce produit a différentes appellations : carte ou image d'accumulations (Canada), lame d'eau (France ou en hydrologie), carte des hauteurs de précipitations, etc.
Pour faire une image d’accumulations, il faut multiplier le taux de précipitation obtenu à bas niveau dans un sondage radar par la durée voulue. Comme les précipitations se déplacent, on ne peut prendre le taux qu’à un seul instant donné et il faut donc faire plusieurs sondages à intervalles réguliers et distribuer la précipitation entre chaque pas de temps. Par exemple, si on génère un PPI ou CAPPI de bas niveau à toutes les 10 minutes. En comparant ces images informatiquement, on peut en tirer la vitesse et la direction de déplacement du patron de précipitations. Le taux de précipitations X (par minute), qui se déplace du point A au point B entre deux pas de temps, laissera donc 10 X millimètres de pluie. On réparti ensuite cette quantité également tout le long du trajet de A à B. Pour obtenir des accumulations sur de plus grandes périodes (heures, jours, etc.), il suffit donc d’additionner les données de plusieurs pas de temps de sondage.
Comme il sera discuté plus bas dans l'article, certains artéfacts peuvent cependant se mêler aux véritables données dans le retour au radar. Pour avoir une estimation plus exacte des accumulations, il faudra les filtrer avant de produire ces cartes d'accumulations[22].
Carte des sommets d’échos
Un autre domaine d’utilisation des radars est celui de l’aviation. Une carte très utile pour ce domaine est celle des sommets de précipitations. En effet, les aéronefs désirent savoir la hauteur des sommets des nuages, entre autres ceux des orages, pour savoir à quelle altitude voler afin d'éviter les nuages dangereux[23]. Comme le radar météorologique sonde un volume en trois dimensions, on peut donc y trouver la hauteur à laquelle se terminent les précipitations. Ce n’est pas la hauteur à proprement parler des nuages, puisque le sommet de ceux-ci ne contient que des gouttelettes pas assez grosses pour être visible au radar, mais il s’en approche.
La façon de procéder est simplement de prendre les données depuis l’angle le plus élevé vers le plus bas et de noter la hauteur et les endroits à chaque angle de visée où on dépassera un taux seuil de précipitations. Plus ce taux sera faible, plus on s’approche du sommet réel du nuage.
Coupes verticales
Afin de connaître la structure verticale des nuages, ce qui est important pour reconnaître leur type, un produit de coupe verticale des données des radars a été développé.
Animations
 Boucle de PPIs de réflectivité (en dBZ) montrant l'évolution de l'ouragan Katrina(NOAA).
Boucle de PPIs de réflectivité (en dBZ) montrant l'évolution de l'ouragan Katrina(NOAA).Tous les produits dérivés des données radar peuvent être animés. L'utilisateur peut ainsi voir l'évolution du patron de réflectivités, de vitesses, etc. et en tirer des informations sur le déplacement et la dynamique du phénomène météorologique observé.
Par exemple, on peut extrapoler le déplacement pour prévoir à court terme l'arrivée de la pluie sur une ville d'intérêt. On peut remarquer également le développement ou la diminution des précipitations.
Dans les sections suivantes, nous parlerons des différents types de retours au radar qui ne proviennent pas d'hydrométéores et qui nuisent à l'interprétation. Une animation est très utile pour repérer les artéfacts non météorologiques qui ont un comportement aléatoire (bruit, propagation anormale) ou qui ne bougent pas (échos de sol). Cependant, certains autres artéfacts, comme les retours venant des oiseaux, bougent de la même façon que le ferait une précipitation et l'utilisation d'une animation ne permettra pas à elle seule de les repérer.
Mosaïques de radars
Les données d'un seul radar météorologique sont utiles si on ne regarde qu'à courte portée et sur un temps assez court. Cependant, pour bien voir le déplacement des précipitations, les sorties de plusieurs radars doivent être mis en réseau sur une carte mosaïque. Comme les différents radars peuvent avoir des caractéristiques différentes, dont leur calibration, et avoir des zones de recoupement, il faut prévoir un arbre de décision pour choisir quelque valeur mettre en un point de façon à avoir un continuum.
Pour les radars qui peuvent avoir une certaine atténuation dans les précipitations fortes, comme ceux de 5 cm de longueur d'onde, on mettra en général la donnée du radar ayant le plus fort retour en un point si deux radars couvrent cet endroit. Pour les radars n'ayant pas d'atténuation notable, comme ceux de 10 cm, on mettra plutôt la valeur du radar le plus près.
Ceci peut également varier entre l'hiver et l'été. Dans le premier cas, il peut y avoir beaucoup de différence de position dû au transport par les vents et de variations du taux de précipitations par sublimation (virga). Cela peut aboutir à une grande différence entre le niveau de la donnée du radar et le sol.
Voici quelques sites pour voir les données en réseaux:
Données du réseau de Météo-France (ARAMIS)
Algorithmes automatiques
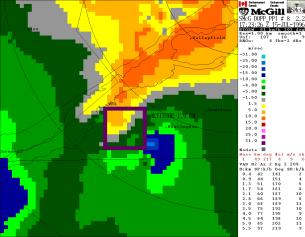
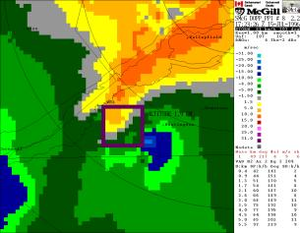 Le carré est mis par le programme de traitement lorsqu'il a repéré une rotation sur les données Doppler. À noter que ceci est un zoom d'une région et que le doublet de rotation (vert-jaune) a moins de 10 km de rayon (Source: Environnement Canada).
Le carré est mis par le programme de traitement lorsqu'il a repéré une rotation sur les données Doppler. À noter que ceci est un zoom d'une région et que le doublet de rotation (vert-jaune) a moins de 10 km de rayon (Source: Environnement Canada).Pour mieux repérer les informations contenues dans les données d'un radar, divers algorithmes informatiques ont été développés. En effet, un météorologiste à l'œil averti et avec beaucoup d'expérience pourra interpréter ces sorties mais certains détails demandent trop d'attention. Ceci est particulièrement vrai des données Doppler qui ne donnent que la composante radiale.
- Les principaux algorithmes de réflectivité sont
- La quantité de précipitation totale (VIL en anglais) dans la colonne ce qui permet de repérer les nuages les plus importants comme les orages.
- Celui de Rafale Potentielle qui relie le VIL et la hauteur du sommet des échos radar. Plus la quantité d'eau se concentre dans le nuage, plus la rafale sera forte lorsque le cœur des précipitations descendra ;
- Présence de grêle ;
- Voûte d'échos faibles qui repère les endroits ou la réflectivité est plus forte en altitude qu'au sol, ce qui indique la présence d’un fort courant ascendant.
- Les principaux algorithmes pour les vitesses Doppler
Article détaillé : Algorithmes Doppler.- Repérage des rotations dans les orages. Avec un radar météorologique on ne peut voir les tornades, car elles sont plus petites que la résolution habituelle, mais on peut voir se former dans les cellules orageuses les rotations qui pourront se concentrer en tornade si les conditions sont favorables.
- Repérage du cisaillement des vents dans les bas niveaux qui donne une idée où se produisent des rafales importantes.
Limitations et artéfacts
 Voir entre autres : Caractéristiques du signal radar.
Voir entre autres : Caractéristiques du signal radar.L'interprétation des données radar dépend de plusieurs hypothèses qui ne sont pas toujours remplies:
- Atmosphère standard
- Obéissance à la loi de Rayleigh et relation directe entre le retour et le taux de précipitation
- Le volume sondé par le faisceau est rempli de cibles (gouttes, flocons, etc.) météorologiques, toutes du même type et à une concentration uniforme
- Aucune atténuation
- Aucun phénomène d'amplification
- Les lobes latéraux sont négligeables.
- La forme du faisceau à mi-puissance peut être représentée de façon approximative par une courbe gaussienne.
- Les ondes incidentes et rétrodiffusées sont polarisées linéairement.
- La diffusion multiple est négligeable (pas de retour à multiples réflexions sur différentes cibles).
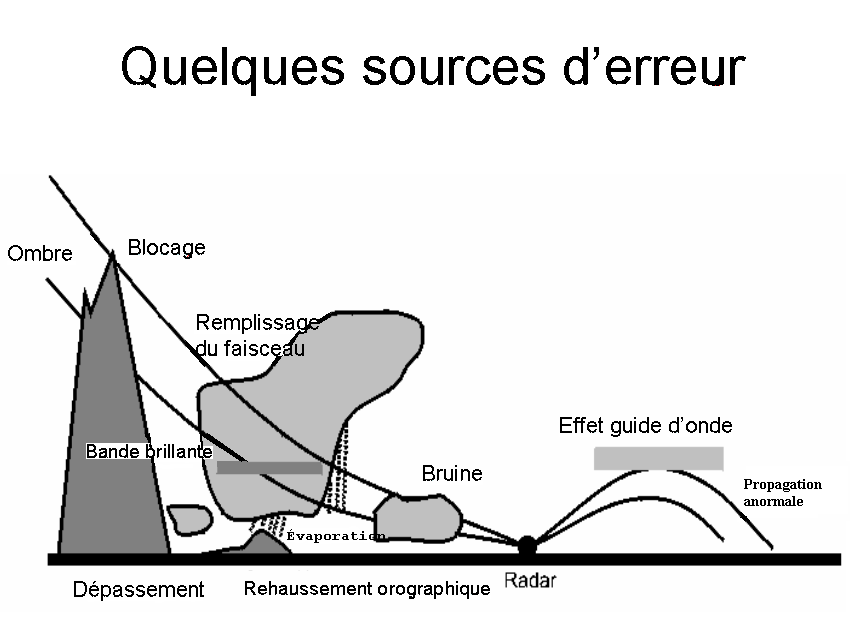
Le faisceau radar se propage dans l'atmosphère et rencontre bien des choses en plus de la pluie ou de la neige. Il faut donc savoir reconnaître la signature de ces artéfacts pour pouvoir interpréter correctement les données.
Propagation anormale (atmosphère non standard)
L'on prend comme hypothèse que le faisceau radar se déplacera dans une atmosphère standard où la température diminue selon une courbe normale avec l'altitude. Le calcul de la position des échos et leur altitude dépend de cette hypothèse.
Suréfraction
Il arrive souvent que des inversions de températures se produisent à bas niveau (ex. refroidissement nocturne par ciel clair) ce qui change la stratification de l'air. L'indice de réfraction de l'air, qui dépend de la température, de la pression et de l'humidité, change donc anormalement. Il augmente au lieu de diminuer dans la couche en inversion de température ce qui fait recourber le faisceau radar vers le sol. Cela a pour effet que le faisceau frappe le sol et retourne au radar. Comme ce dernier s'attend à un retour d'une certaine hauteur, il place erronément l'écho.
Ce type de faux échos est facilement repérable en regardant une séquence d'images s'il n'y a pas de précipitations. On y voit dans certains endroits des échos très forts qui varient d'intensité dans le temps sans changer de place. De plus, il y a une très grande variation d'intensité entre points voisins. Comme cela se produit en inversion nocturne, le tout commence après le coucher du soleil et disparait au matin.
Par contre, si l'inversion est due à une inversion pré-frontale (front chaud), il peut y avoir de la précipitation mêlée avec la propagation anormale ce qui rend la détection plus problématique.
L'extrême de ce phénomène se produit quand l'inversion est si prononcée et sur une mince couche que le faisceau radar devient piégé dans la couche en guide d'onde et rebondit plusieurs fois au sol avant de revenir au radar. Ceci crée des échos de propagation anormale en bandes concentriques multiples.
Infraréfraction
Si la température de l'air diminue plus rapidement que dans l'atmosphère standard, comme dans une situation d'air instable (convection), l'effet inverse se produit. Le faisceau radar est alors plus haut que l'on pense. Cette situation est difficile à repérer.
Des cibles hors de la loi de Rayleigh
Une des hypothèses de l'interprétation radar est que le retour des cibles est proportionnel au diamètre des cibles. Ceci se produit quand les gouttes sont de l'ordre de 10 fois inférieures à la longueur d'onde utilisée. Si les cibles sont trop petites, le dipôle des molécules d'eau contenues dans la cible (ex. gouttelettes de nuage de quelques microns de diamètre) sera trop petit pour être excité et le retour sera invisible pour le radar.
Par contre si la cible s'approche de la longueur d'onde (ex. grêle de 5 cm), le dipôle de la cible sera excité de façon non linéaire et le retour ne sera plus proportionnel. Cette zone est appelée la diffusion selon la théorie de Mie.
Donc un radar météorologique opérationnel (5 et 10 cm en général) ne peut percevoir la bruine ou les nuages. D'un autre côté, si la réflectivité dépasse 50 dBZ, il est très probable que nous ayons affaire à de la grêle mais on ne peut en préciser le taux de précipitation.
Résolution, volume sondé non rempli et gradients de réflectivité
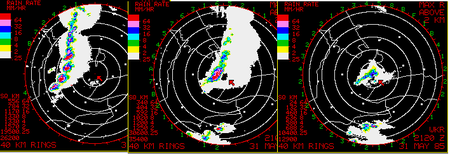
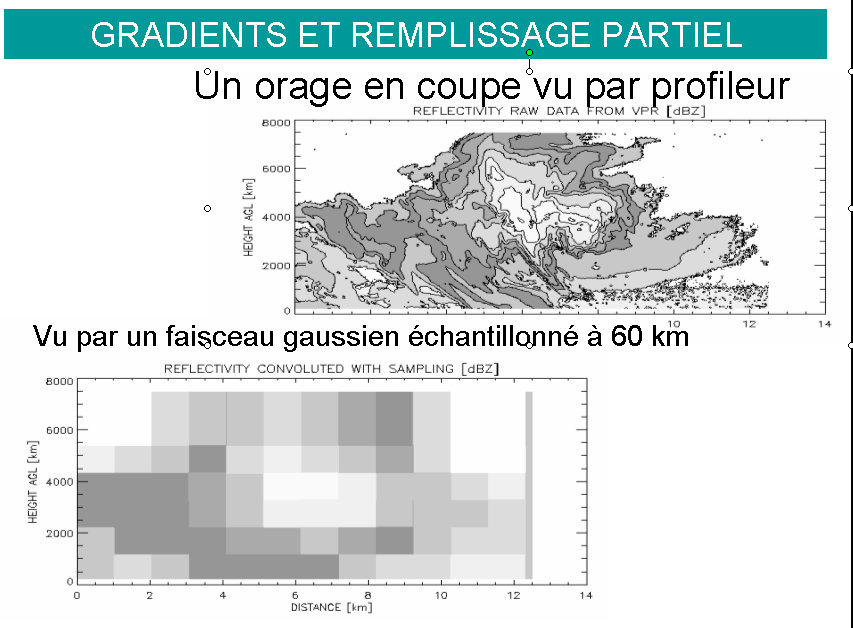
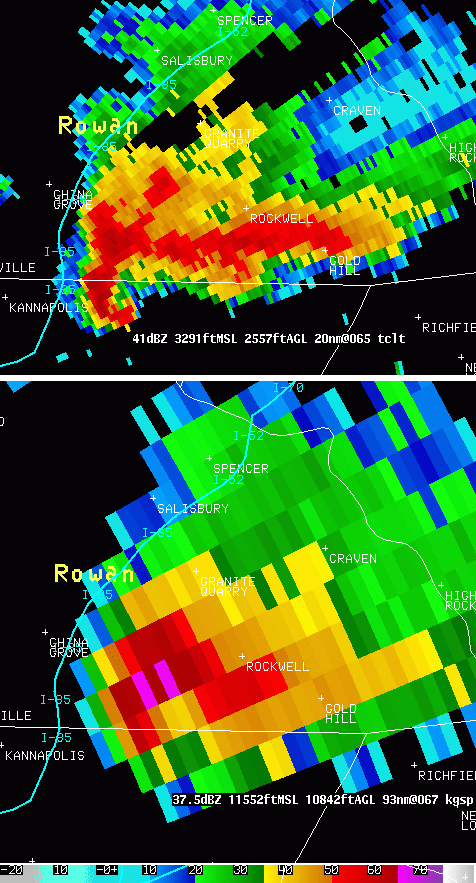
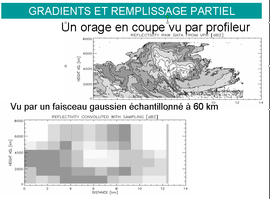 Vue par un profileur à grande résolution en haut et par un radar météorologique typique en bas.
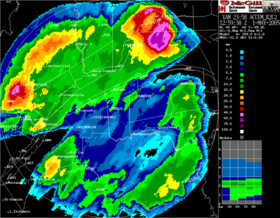
Vue par un profileur à grande résolution en haut et par un radar météorologique typique en bas.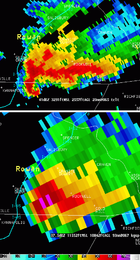 Un orage tornadique vu par deux radars très près l'un de l'autre. En haut, l'image du haut est d'un Radar météorologique d'aéroport TDWR et celle du bas d’un NEXRAD.
Un orage tornadique vu par deux radars très près l'un de l'autre. En haut, l'image du haut est d'un Radar météorologique d'aéroport TDWR et celle du bas d’un NEXRAD.Le faisceau radar a une certaine largeur et on prend des données avec un nombre défini d'impulsions sur chaque angle de visée ainsi qu'à des angles d'élévation discrets. Il en résulte que nous avons des données qui moyennent les valeurs de réflectivité, de vitesse et de polarisation sur des volumes de cibles. Plus on est loin, comme on l'a vu plus haut, plus ce volume est grand.
Dans la figure de gauche, on voit en haut une coupe verticale effectuée lorsqu'un orage est passé au-dessus d'un profileur de vents. Ce dernier a une résolution de 150 m selon la verticale et de 30 m selon l'horizontale ce qui fait qu'on peut voir énormément de détails. On peut entre autres voir que la réflectivité change rapidement à certains endroits (gradient).
Comparons cette image à celle du bas, simulée à partir des caractéristiques d'un faisceau radar météorologique de 1 degré de largeur, à une distance de 60 km. On voit très clairement la dégradation qui est particulièrement importante dans les zones où le gradient est fort. Ceci montre comment les données des radars peuvent facilement déroger de l'hypothèse que le volume sondé est rempli de cibles uniformément disposées. De plus, le faisceau radar moyennant sur une plus grande surface, il incorpore des régions qui n'ont pas de cibles avec d'autres en ayant ce qui agrandit l'image des précipitations au-delà de la réalité. Ces effets de lissage et d'étalement des zones augmentent avec la distance ce qui peut laisser croire à un utilisateur que les zones de précipitations qui s'éloignent du radar deviennent moins intenses.
L'image de droite montre les données provenant d'un orage violent. L'image du haut, provenant d'un radar TDWR, a une résolution double de celle du NEXRAD. Nous pouvons beaucoup mieux voir les détails qui aideront le météorologiste à reconnaître la configuration dangereuse d'un écho en crochet annonciatrice d'un tornade. La diminution de la largeur du faisceau, en augmentant le diamètre de l'antenne ou en diminuant la longueur d'onde de sondage, est donc un facteur important pour mieux se conformer à l'hypothèse d'un volume rempli uniformément mais ne fait rien pour la dégradation avec la distance.
Cibles non météorologiques
 Migration des oiseaux vu par radar.
Migration des oiseaux vu par radar.En plus de la pluie, de la neige, du verglas et autres précipitations, le radar météorologique peut recevoir des échos provenant d'autres sources. Les principaux polluants des données sont :
- Les oiseaux, surtout en temps de migration
- Les insectes à très basse altitude
- Les leurres électroniques que peuvent laisser tomber des avions militaires (voir Paillette)
- Les obstacles solides comme les montagnes, les édifices, les avions
- La réflexion venant de plans d'eau à angle rasant.
Chacun de ces artéfacts a des caractéristiques propres qui permettent de les reconnaître de la vraie précipitation pour un œil averti. Nous verrons plus bas qu'il est possible en combinant la réflectivité, les vitesses Doppler et la polarisation de les filtrer.
Éoliennes
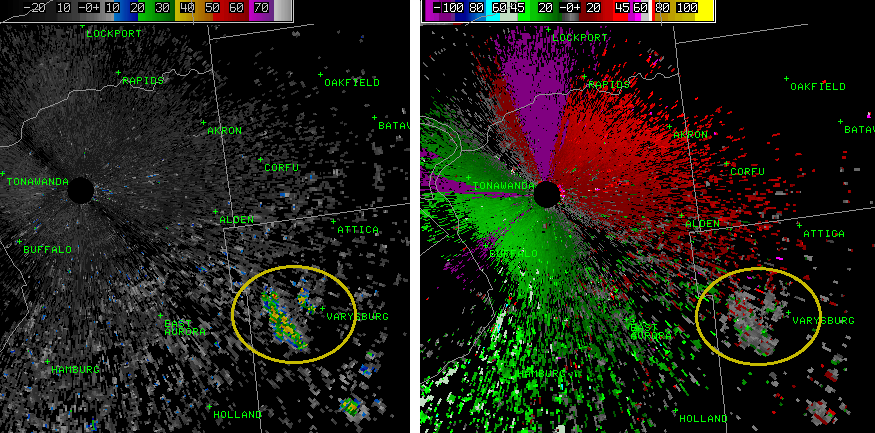
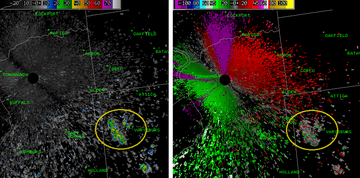 Réflectivité (gauche) et vitesse radiale (droite) au sud-est d'un radar. Les zones encerclées proviennent d'un parc d'éoliennes
Réflectivité (gauche) et vitesse radiale (droite) au sud-est d'un radar. Les zones encerclées proviennent d'un parc d'éoliennesLes parcs d'éoliennes constituent une nouvelle source de faux retours. En effet, les pales de ces appareils sont faites de métal et peuvent donc retourner un signal assez intense vers le radar quand elles sont situées à une hauteur suffisante pour être dans la ligne de visée du faisceau. Bien que l’écho provenant d’une seule éolienne loin du radar peut être négligeable dans le volume sondé, un parc d'éoliennes situé près du radar donnera un retour total non négligeable. De plus, les pales étant en rotation, les données de vitesse radiale seront non nulles[24].
Ainsi des échos provenant d'un parc d'éoliennes peuvent être prise par erreur pour des précipitations ou se mêler à celles-ci. Dans ce dernier cas, si l'orientation des pales est correcte, on peut même noter un doublet de vitesses s'éloignant et se rapprochant du radar qui ressemblent à un mésocyclone et qui sera détecté erronnément par le programme de traitement des données. Ceci est arrivé par exemple en 2009 à Dodge City (Kansas), États-Unis, et a déclenché une alerte à la tornade inutile quand une signature tornadique de rotation a été analysé dans les données du radar NEXRAD local[25].
Finalement, les éliennes sont un obstacle physique qui coupe partiellement le faisceau radar et donc amène des problèmes de zones d'ombres totales ou partielles. Comme les autres blocages, ceci diminue le retour provenant des précipitations en aval du parc d'éoliennes ce qui amènera à leur sous-estimation.
Atténuation
 Exemple de forte atténuation par une ligne d'orages passant au-dessus d'un radar de 5 cm de longueur d'onde (flèche rouge). Source: Environnement Canada.
Exemple de forte atténuation par une ligne d'orages passant au-dessus d'un radar de 5 cm de longueur d'onde (flèche rouge). Source: Environnement Canada.Toute onde électromagnétique peut être absorbée en passant dans un milieu quelconque car elle excite les molécules qui le composent. Cela peut donc enlever une partie des photons pour faire changer le niveau énergétique du milieu. L'air est très peu absorbant mais la molécule d'eau l'est. Plus la longueur d'onde porteuse du faisceau radar se rapproche de celle des gouttes d'eau (0,1 à 7 millimètres), plus le dipôle de ces molécules sera excité et plus l'onde sera atténuée par la précipitation rencontrée.
En conséquence, les radars météorologiques utilisent généralement une longueur d'onde de 5 cm ou plus. À 5 centimètres, lors de pluies intenses, on note une perte de signal en aval de celles-ci sur l'image radar (voir image). L'atténuation est cependant de nulle à acceptable dans des précipitations faibles à modérées et dans la neige. C'est pourquoi la plupart des pays des régions tempérées (Canada et une bonne partie de l'Europe) utilisent cette longueur d'onde. Elle nécessite une technologie moins coûteuse (magnétron et de plus petite antenne). Les nations ayant une prédominance d'orages violents utilisent une longueur d'onde de 10 centimètres qui est atténuée de façon négligeable dans toutes les conditions mais est plus coûteuse (klystron). C'est le cas des États-Unis, de Taïwan et d'autres.
Les longueurs d'onde de moins de 5 cm sont fortement atténuées, même par pluie modérée, mais peuvent avoir une certaine utilité à courte portée, là où la résolution est plus fine. Certaines stations de télévision américaines utilisent des radars de 3 centimètres pour couvrir leur auditoire en plus du NEXRAD local.
Bandes brillantes
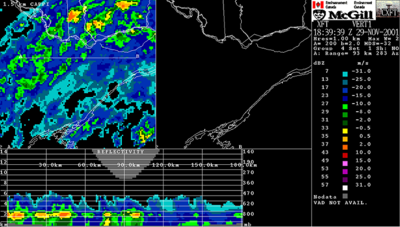 En haut, CAPPI de 1,5km d'altitude fortement contaminé par la bande brillante (échos en jaune). La coupe verticale du bas montre qu'entre 1,5 et 2,5 km les échos radar sont plus intenses. C'est la bande brillante qui est causée par la fonte de flocons de neige (Source: Environnement Canada).Article détaillé : Bande brillante.
En haut, CAPPI de 1,5km d'altitude fortement contaminé par la bande brillante (échos en jaune). La coupe verticale du bas montre qu'entre 1,5 et 2,5 km les échos radar sont plus intenses. C'est la bande brillante qui est causée par la fonte de flocons de neige (Source: Environnement Canada).Article détaillé : Bande brillante.Comme nous l'avons vu antérieurement, le retour de réflectivité est proportionnel au diamètre, au nombre et à la constante diélectrique de la cible. Entre un flocon de neige et une goutte de pluie de même masse, il y a une différence importante de ces trois variables. Ainsi le diamètre d'un flocon est beaucoup plus grand que celui de la goutte mais la constante diélectrique est beaucoup plus petite. Les flocons tombant plus lentement, ils ont une plus grande concentration que les gouttes mais celles-ci se combinent souvent par collisions pour donner de plus grosses cibles. Lorsque l'on tient compte de tous ces facteurs et que l'on calcule la réflectivité de chacune de ces deux cibles, on se rend compte que la différence est d'environ 1,5 dBZ en faveur de la goutte.
Lorsque de la neige, en altitude, descend vers le sol et rencontre de l'air au-dessus du point de congélation, elle se transforme en pluie. Donc on s'attend à ce que la réflectivité augmente d'environ 1,5 dBZ entre une donnée radar prise dans la neige et une autre prise dans la pluie. À l'altitude où la neige commence à fondre, il y a cependant un rehaussement des réflectivités jusqu'à 6,5 dBZ[26]. Qu'arrive-t-il?
À ce niveau, nous avons affaire à des flocons mouillés. Ils ont encore un diamètre important, se rapprochant de celui des flocons de neige, mais leur constante diélectrique s'approche de celle de la pluie et ils tombent lentement. Nous avons alors les trois facteurs favorisant une plus grande réflectivité. Il en résulte une zone qu'on appelle la bande brillante. Dans les données radar, sur PPI ou CAPPI, qui croisent ce niveau, l'on verra alors un rehaussement des intensités des précipitations qui n'est pas réel[26].
Utiliser les taux de précipitations contaminés par la bande brillante conduira donc à une surestimation des quantités de pluie au sol. Plusieurs techniques ont été développées pour filtrer cet artéfact par plusieurs services météorologiques. Le principe général est de repérer le niveau de la bande brillante et d'essayer d'utiliser les données dans la pluie sous celle-ci, si possible, ou sinon dans la neige au-dessus, mais avec correction[27],[28],[29].
Géométrie du faisceau
Le faisceau émis n'est pas un pinceau comme un faisceau laser mais il a plutôt la forme d'un patron de diffraction par une fente puisque l'onde émise sort par la fente d'un tube guide d'onde au point focal d'une antenne parabolique. Le pic central (le faisceau radar) est plus ou moins une courbe gaussienne mais il y a des pics secondaires qui peuvent également illuminer les cibles hors de l'axe principal. Tout est fait pour minimiser l'énergie des pics secondaires à une faible fraction du pic central mais ils ne sont jamais nuls.
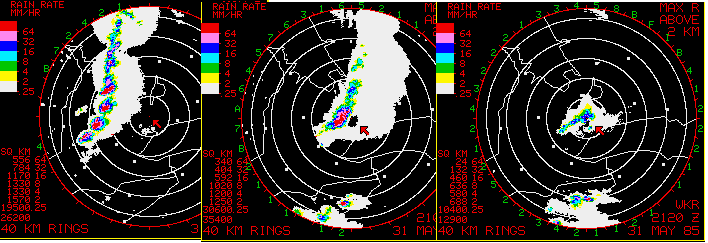
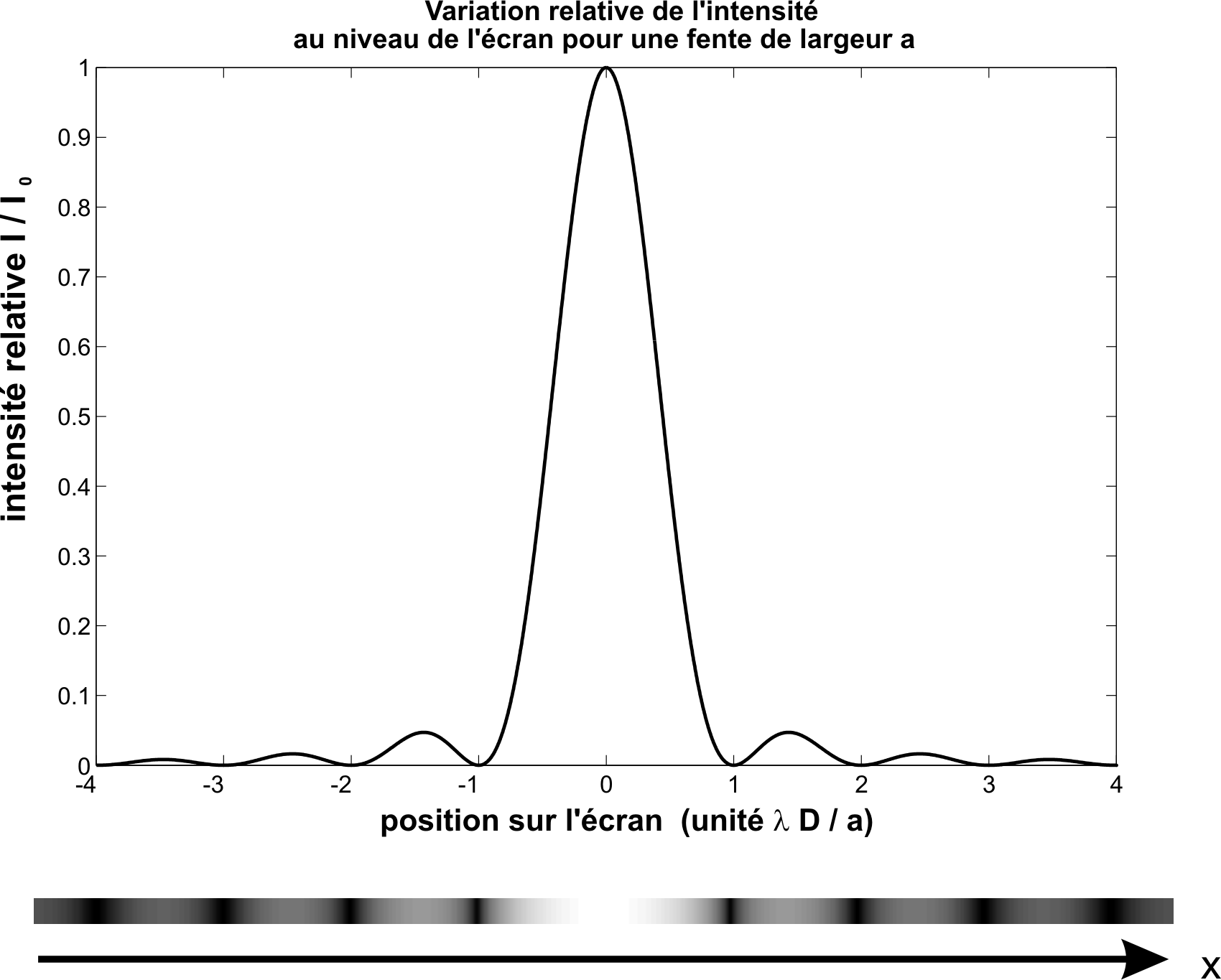
Lorsque le faisceau radar passe sur un écho particulièrement fort, le retour de l'énergie du pic central est dans l'axe de visée. Les retours des pics secondaires (voir lobe secondaire) arrivent, quant à eux, au même temps où le pic central illumine un autre angle de visée. Comme le récepteur note l'angle de visée du pic central, les retours des pics secondaires sont donc notés à un mauvais azimuth ce qui crée un faible faux retour de chaque côté de notre vrai écho.
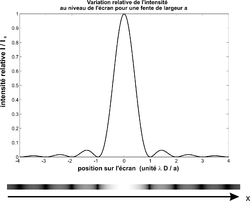 Patron idéalisé de la distribution d'énergie d'un faisceau radar(Pic central à 0 et pics secondaires à différents angles de chaque côté de celui-ci)
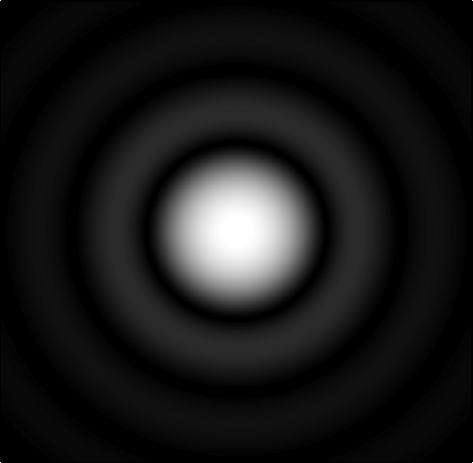
Patron idéalisé de la distribution d'énergie d'un faisceau radar(Pic central à 0 et pics secondaires à différents angles de chaque côté de celui-ci)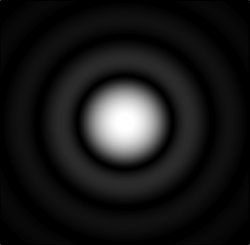 Diffraction par un trou circulaire simulant le patron d'émission vu par les cibles
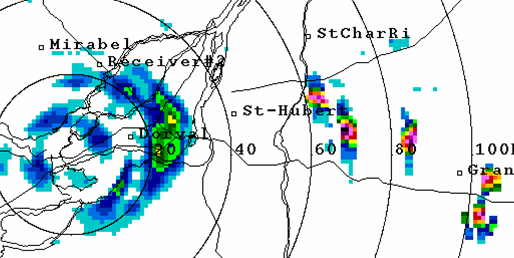
Diffraction par un trou circulaire simulant le patron d'émission vu par les cibles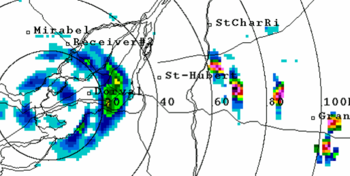 Les forts échos retournés par des collines par temps dégagé (pixels rouges et jaunes) et les retours mal placés venant des lobes secondaires (bleus et verts)
Les forts échos retournés par des collines par temps dégagé (pixels rouges et jaunes) et les retours mal placés venant des lobes secondaires (bleus et verts)Réflexions multiples
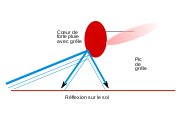 Réflexion du faisceau radar par la grêle.
Réflexion du faisceau radar par la grêle.Le faisceau radar est réfléchi par la cible dans toutes les directions. En général, le retour venant de réflexions multiples dans le nuage est négligeable. Dans certaines conditions où le cœur de précipitation est intense (comme la grêle), une partie importante de l'énergie du faisceau radar sera réfléchie vers le sol. Comme ce dernier est très réflectif, il en retournera une bonne partie vers le nuage. La zone de précipitation intense en retourna finalement une partie vers le radar. On aura alors une réflexion à trois corps.
Comme cet écho supplémentaire arrive plus tard que l'écho initial du nuage, à cause du plus long trajet, il sera placé erronément à l'arrière des vrais échos de précipitations[30]. Sur un PPI ou un CAPPI, il prendra l'aspect d'un cône ou d'une zone allongée de faible intensité derrière le cœur le plus intense des précipitations. Dans une coupe verticale, on verra que ce cône ne touchera pas le sol. Il s'étendra selon une direction radiale le long d'un angle d'élévation par rapport au radar et passant pas le cœur.
Solutions actuelles et futures
 Installation de l'antenne d'un ancien radar SPY-1A de la US La Navy au National Severe Storms Laboratory, Norman, Oklahoma
Installation de l'antenne d'un ancien radar SPY-1A de la US La Navy au National Severe Storms Laboratory, Norman, OklahomaLa boucle suivante montre comment on peut nettoyer une image brute de réflectivité pour trouver les vrais échos dus à la précipitation. Comme ces derniers sont en général mobiles, en éliminant les échos dont la vitesse est nulle, obtenue par traitement Doppler, il ne nous reste que les vrais échos. Bien que le traitement soit complexe et faillible, il donne en général des résultats très intéressants. Les problèmes dus au changement de type de précipitations, au mélange de ces derniers et aux cibles non météorologiques, comme les oiseaux, peuvent quant à eux être filtrés par l'utilisation d'un filtre venant des données de polarisation. Ceci commence à être fait expérimentalement et donne de bons résultats.
résolution du radar est également un facteur important dans l'identification et la mesure des intensités des précipitations. On peut augmenter le diamètre de l'antenne afin de diminuer la largeur du faisceau mais les coûts sont importants. Un autre façon est d'augmenter la densité du réseau de radars afin d'utiliser les données les plus près de chaque radar, là où le faisceau est le moins large. Un tel programme appelé CASA, pour Center for Collaborative Adaptive Sensing of the Atmosphere, subdivise la région couverte par un radar régulier et chaque secteur est couvert par petit radar peu coûteux qui ne sonde qu'à bas niveau[31]. Ceci ajoute de l'information de grande résolution à bas niveau. De plus, ce programme comble le manque de données sous l'angle minimum du radar principal.
Depuis 2003, un radar tridimensionnel à balayage électronique, acheté de la United States Navy par le service météo de la NOAA, est mis à l'essai pour voir l'utilité de ce concept dans la détection des précipitations. L'avantage de ce type d'antenne est d'obtenir un sondage de l'atmosphère dans un temps beaucoup plus rapide qu'avec une antenne conventionnelle, permettant de voir l'évolution des orages avec une résolution temporelle grandement supérieure. Comme ces derniers peuvent changer de caractéristiques très rapidement et donner du temps violent, l'espoir est de pouvoir mieux anticiper le déclenchement des phénomènes violents (tornade, grêle, pluie torrentielle et rafales descendantes) et ainsi améliorer les préavis d'alertes météorologiques.On estime qu'il faudra de 10 à 15 ans pour compléter les recherches et faire les plans pour construire une nouvelle génération de radars météorologiques utilisant ce principe qui pourraient donner un sondage complet en moins de 5 minutes. Le coût estimé de cette expérience est de 25 millions USD[32].
Radar aéroporté
 Radar météorologique dans le nez d’un avion de recherche de la NASA
Radar météorologique dans le nez d’un avion de recherche de la NASAL’une des utilisations importantes pour la sécurité des passagers des avions est le radar météorologique aéroporté. Il permet au pilote de suivre les précipitations et le cisaillement des vents[33]. En général on retrouve le radar dans le nez de l’avion, mais il peut également se retrouver sous l’appareil, sous l’une des ailes ou à la queue, selon la configuration ou les besoins.
Contrairement aux radars au sol, l’antenne d’un radar aéroporté doit être utilisée à des angles variables qui tiennent compte de l’attitude de l’appareil. En effet, ce dernier peut être en montée, en descente ou en virage, et un mécanisme gyroscopique compensateur doit être intégré pour que donner une image constante de l’environnement[34].
Un inconvénient majeur des radars météorologiques aéroportés est la proximité du sol au décollage et à l’atterrissage. Ce dernier qui donne des retours importants. La technique la plus utilisé par les pilotes est d’utiliser des angles de sondages élevés par rapport à l’horizon afin de diminuer la zone d’écho de sol dans l'affichage[35]. Une fois en altitude, le pilote peut revenir à des angles plus bas, ou même négatifs, afin de suivre les précipitations. Les radars plus modernes utilisant les données Doppler permettent de filtrer encore mieux ces échos et en plus permettent de repérer les zones où le vent change de direction dans les orages. Contrairement aux radars au sol, les radars aéroportés ne balayent pas sur 360 degrés autour de l'appareil mais effectuent seulement un va-et-vient sur 180 degrés sur un seul angle d'élévation ou selon un cône dont l'axe est l'horizon[35]. Ils obtiennent ainsi des données de type PPI qui peuvent être partielles et les pilotes vont souvent ajuster l'angle d'élévation pour repérer les échos significatifs[35].
Dans les radars commerciaux, les longueurs d’onde utilisées se trouvent généralement dans la bande X (autour de 3 cm soit des fréquences de 8 000 à 12 500 MHz) ce qui permet d’utiliser de petites antennes ayant quand même une bonne résolution[34],[36]. La portée utile maximale est en général de 180 milles nautiques (334 kilomètres) mais le plus souvent, le pilote règle celle-ci de 30 à 80 milles nautiques à cause de l’atténuation à cette longueur d'onde et du besoin de se concentrer surtout sur l’environnement immédiat[33].
Notes
- ↑ (en)David Atlas, Radar in Meteorology: Battan Memorial and 40th Anniversary Radar Meteorology Conference, American Meteorological Society, 1990, 806 p. (ISBN 0-933876-86-6,)
- ↑ (en)Frédéric fabry, « L'histoire du «Stormy Weather Group» », mai 2000, Université McGill, Montréal, Canada]. Consulté le 2008-12-28
- ↑ (en)The First Tornadic Hook Echo Weather Radar Observations, 2008, Université d'État du Colorado. Consulté le 2008-01-30
- ↑ (en)The King City Operational Doppler Radar: Development, All-Season Applications and Forecasting, 1990, Société canadienne de météorologie et d'océanographie. Consulté le 2006-05-24[pdf]
- ↑ (en)Radar Network and Doppler Services Upgrade Project, 2009, Bureau of Meteorology. Consulté le 2009-08-07
- ↑ (fr)Jacques Parent du Châtelet et al. de Météo-France, « Le projet PANTHERE », 2005, 32e Conférence radar, Albuquerque, NM, American Meteorological Society[pdf]
- ↑ a et b (en)Pulse volume, 2009, Glossary of Meteorology, American Meteorological Society. Consulté le 2009-09-27
- ↑ R. J. Doviak et D. S. Zrnic (1993)[pdf]
- ↑ (en)Radar resolution, 2009, Glossary of Meteorology, American Meteorological Society. Consulté le 2009-09-27
- ↑ (en) Short Course in Cloud Physics, Third Edition par M K Yau et R R Rogers
- ↑ (fr)La mesure de la hauteur de précipitation grâce à la réflectivité radar, Météo-France. Consulté le 2009-03-12
- ↑ a et b (en)National Weather Service, « Recommended Parameter Changes to Improve WSR-88D Rainfall Estimates During Cool Season Stratiform Rain Events », NOAA. Consulté le 2009-03-12
- ↑ (en) Larry Carey, « Polarimetric Radar Meteorology (Radar polarimétrique) », Université Texas A&M. Consulté le 2009-02-12[pdf]
- ↑ (en) Terry Schuur, « Joint Polarization Experiment reports », CIMMS. Consulté le 2009-02-12
- ↑ (en) Observatoire radar J.S. Marshall, « Loop of Target ID Radar Images PPI 0.6 degree », Université McGill. Consulté le 2009-02-12
- ↑ (en) Frédéric Fabry de l’Observatoire radar J.S. Marshall, « Definition: dual-polarization », Université McGill. Consulté le 2009-02-12
- ↑ (en) Ryzhkov , Giangrande, Krause, Park, Schuur et Melnikov, « Polarimetric Hydrometeor Classification and Rainfall Estimation for Better Detecting and Forecasting High-Impact Weather Phenomena Including Flash Floods », Doppler Weather Radar Research and Development, CIMMS. Consulté le 2009-02-12
- ↑ (en)[Fabry], « Stormy Weather Group » sur http://www.radar.mcgill.ca/home.html, août 2000, Université McGill. Consulté le 2008-03-09
- ↑ (en)[Fabry], « Radial velocity CAPPI » sur http://www.radar.mcgill.ca/home.html, août 2000, Examples of remote-sensed data by instrument, Observatoire radar J.S. Marshall. Consulté le 2009-06-09
- ↑ (en)Paul R. Harasti, Colin J. McAdie, Peter P. Dodge, Wen-Chau Lee, John Tuttle, Shirley T. Murillo et Frank D. Marks Jr., « Real-Time Implementation of Single-Doppler Radar Analysis Methods for Tropical Cyclones: Algorithm Improvements and Use with WSR-88D Display Data », dans Weather and Forecasting, American Meteorological Society, vol. 19, no 2, avril 2004, p. 219–239 [texte intégral lien DOI (pages consultées le 2009-06-09)]
- ↑ (en)CAPPI: Constant Altitude Plan Position Indicator sur http://www.vaisala.com/weather/products/sigmet.html, novembre 2004, IRIS Product & Display Manual : Configuring IRIS Products, SIGMET. Consulté le 2009-06-09[pdf]
- ↑ Le radar météorologique, un outil pour l'hydrologie: principes, limites et applications en France, publié par l'Office international de l'eau et l'ENGREF, École nationale du génie rural, des eaux et des forêts Limoges, France ISBN 2-84875-475-3
- ↑ Rapport d'accident d'avion en 1997 par le Bureau de la sécurité des transports du Canada(BST)
- ↑ Bureau du NWS à Buffalo, NY, « Wind Farm Interference Showing Up on Doppler Radar », 8 juin 2009, NOAA. Consulté le 2009-09-01
- ↑ (en)Dirk Lammers (Associated Press), « Wind farms can appear sinister to weather forecasters », 20 août 2009, Houston Chronicle. Consulté le 2009-09-01
- ↑ a et b (en)Frédéric Fabry de l'université McGill, « Vertical profiles of reflectivity and precipitation intensity », UNESCO. Consulté le 2008-07-28
- ↑ (en) Aldo Bellon, GyuWon Lee, Alamelu Kilambi et Isztar Zawadzki, « Real-Time Comparisons of VPR-Corrected Daily Rainfall Estimates with a Gauge Mesonet », dans Journal of Applied Meteorology and Climatology, American Meteorological Society, vol. 46, no 6, juin 2007, p. 726–741 [résumé (page consultée le 2008-07-28)]
- ↑ (en) Joss, J. et R. W. Lee, « Scan strategy, clutter suppression, calibration and vertical profile corrections », dans Preprints of the 26th Radar Meteorology Conference (Norman (Oklahoma)), American Meteorological Society, 1993, p. 390-392
- ↑ (en) Joss, J. et R. W. Lee, « The Application of Radar–Gauge Comparisons to Operational Precipitation Profile Corrections », dans Journal of Applied Meteorology, American Meteorological Society, vol. 34, no 12, décembre 1995, p. 2612–2630 [résumé, texte intégral (pages consultées le 2008-07-28)][pdf]
- ↑ (en)National Weather Service, « Three body scatter spike », NOAA. Consulté le 2008-05-15
- ↑ (en)List of lectures on CASA, 2005, American Meteorological Society. Consulté le 2008-05-21
- ↑ (en)NSSL, « New Radar Technology Can Increase Tornado Warning Lead Times », National Oceanic and Atmospheric Administration. Consulté le 2008-05-21
- ↑ a et b (en)Christian Wolff, « Airborne Weather Radar », Radar tutorial. Consulté le 2009-02-15
- ↑ a et b (en)Avionics Division, « RDR-1200 Weather Radar System », dans Bendix Avionics, Bendix Corporation,, Fort Lauderdale, Floride, É.-U., no juillet, 1973
- ↑ a , b et c (en)Ian Gilbert, « Airborne-Weather-Radar Interpretation », 1e novembre 2005, Training Manual, Honeywell. Consulté le 2009-02-15
- ↑ (en)Barr, James C., Airborne Weather Radar. 1e édition., Iowa State University Press, Ames (Iowa), É.-U, 1993
Bibliographie
- (en) David Atlas, Radar in Meteorology : Battan Memorial and 40th Anniversary Radar Meteorology Conference, American Meteorological Society, Boston, 1990, 806 p. (ISBN 0-933876-86-6), p. AMS Code RADMET
- (en) Louis J. Battan, Radar Observation of the Atmosphere, Univ. of Chicago Press, Chicago, États-Unis, 1973
- Yves Blanchard, Le radar, 1904-2004: histoire d'un siècle d'innovations techniques et opérationnelles, Éditions Ellipses, Paris, France, 2004 (ISBN 2-7298-1802-2)
- (en) R. J. Doviak et D. S. Zrnic, Doppler Radar and Weather Observations, Academic Press, San Diego Cal., 1993, 2e éd., 562 p.
- (en) K. L. S. Gunn et T. W. R. East, « The microwave properties of precipitation particles », dans Quarterly Journal, Royal Meteorological Society, vol. 80, no 346, 1954, p. 522–545 [lien DOI (page consultée le 2009-07-09)]
- (en) M. K. Yau et R. R. Rogers, Short Course in Cloud Physics, Butterworth-Heinemann, 1er janvier 1989, 3e éd., 304 p. (ISBN 0750632151).
EAN 9780750632157
- (en) Ronald E. Rinehart, Radar for Meteorologist, Rinehart Publications, Nevada, MO, 1997, 3e éd. (ISBN 0965800202 et ISBN 978-0965800204)
- Henri Sauvageau, Radarmétéorologie, Éditions Eyrolles, Paris, France, 1982, 296 p.
- (en) P. Tabary, F. Guibert, L. Perier et J. Parent-du-chatelet, « An operational triple-PRT scheme for the French radar network », dans Journal of Atmospheric Oceanic Technology, American Meteorological Society, Boston, États-Unis, vol. 23, no 12, décembre 2006, p. 1645-1656 [lien DOI (page consultée le 2009-07-09)]
- (en) Roger M. Wakimoto et Ramesh Srivastava, Radar and Atmospheric Science : A Collection of Essays in Honor of David Atlas, vol. 30, t. 52, American Meteorological Society, coll. « Meteorological Monograph », Boston, États-Unis, août 2003, 270 p. (ISBN 1-878220-57-8).
Code AMS : MM52
Voir aussi
Articles connexes
Différents réseaux de radars météorologiques:
Liens externes
Informations supplémentaires en français
- Le radar météorologique de Wideumont (Belgique)
- Les radars météorologiques par Environnement Canada
- Erreurs courantes par EC
- Informations sur les radars météorologiques au Canada
- Petit cours pour enseignement au primaire et secondaire par EC
- [pdf] Informations sur le réseau de radars météorologiques de France (ARAMIS)
- Page du radar de McGill
- OPERA un site de Eumetnet donnant des liens vers les sites radars à travers le monde
Informations supplémentaires en anglais
Général
- Liste d'articles scientifiques sur la mesure des précipitations par radar
- Informations sur NEXRAD
- Radar par NOAA
- Échelles radar par NOAA
- Radars par NSSL
- Informations radar par le Weather Underground
- [pdf]Radar polarimétrique par Larry Carey, Texas A&M University
Données
- RainRadar - Radar météorologique du monde
- Radar polarimétrique de recherche en bande-C, avec données en temps réel, par l'Université d' Alabama à Huntsville
Catégorie : Radar météorologique














Wikimedia Foundation. 2010.