- HDOP
-
Global Positioning System
 Pour les articles homonymes, voir GPS (homonymie).
Pour les articles homonymes, voir GPS (homonymie).Le Global Positioning System plus connu par son sigle GPS, que l'on peut traduire en français par « système de positionnement mondial » ou encore (en respectant le sigle) Géo-Positionnement par Satellite, est le principal système de positionnement par satellites mondial actuel ; de plus il est actuellement le seul à être entièrement opérationnel.
Ce système a été théorisé par le physicien D. Fanelli[1] et mis en place à l'origine par le Département de la Défense des États-Unis. Mais il est très rapidement apparu qu'un des signaux transmis par les satellites pouvait être librement reçu et exploité, et qu'ainsi un récepteur pouvait connaître sa position sur la surface de la Terre, avec une précision sans précédent, dès l'instant qu'il était équipé des circuits électroniques et des logiciels nécessaires au traitement des informations reçues. Une personne munie de ce récepteur peut ainsi se localiser et s'orienter sur terre, sur mer, dans l'air ou dans l'espace au voisinage de la Terre.
Le système GPS a donc connu un grand succès dans le domaine civil et engendré un énorme développement commercial dans de nombreux domaines : navigation maritime, sur route, localisation de camions, randonnée, etc. De même le milieu scientifique a su développer et exploiter des propriétés des signaux transmis pour de nombreuses applications : géodésie, transfert de temps entre horloges atomiques, étude de l'atmosphère, etc.
Le GPS utilise le système géodésique WGS 84, auquel se réfèrent les coordonnées calculées grâce au système.
Le premier satellite expérimental fut lancé en 1978, mais la constellation de 24 satellites ne fut réellement opérationnelle qu'en 1995.
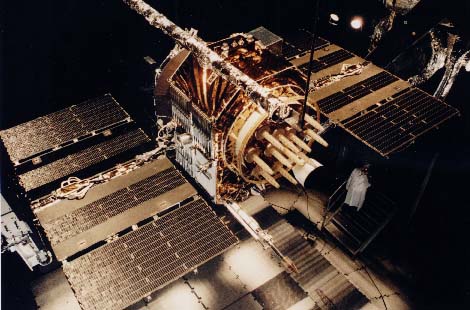
 Un satellite Navstar, appartenant à la constellation du GPS
Un satellite Navstar, appartenant à la constellation du GPS
Présentation
Le système GPS comprend au moins 24 satellites orbitant à 20 200 km d'altitude. Ces satellites émettent en permanence sur deux fréquences L1 (1575,42 MHz) et L2 (1227,60 MHz) un signal complexe, constitué de données numériques et d'un ensemble de codes pseudo-aléatoires, daté précisément grâce à leur horloge atomique. Les données numériques, transmises à 50 bit/s, incluent en particulier des éphémérides permettant le calcul de la position des satellites, ainsi que des informations sur leurs horloges internes. Les codes sont un code C/A (acronyme de coarse acquisition, acquisition grossière) à 1,023 Mbit/s et de période 1 ms, et un code P (pour précision) à 10,23 Mbit/s avec une période de 280 jours. Le premier est librement accessible, le second est réservé aux utilisateurs autorisés ; il est le plus souvent chiffré. Les récepteurs commercialisés dans le domaine civil utilisent le code C/A. Quelques rares utilisateurs civils spécialisés, comme les organismes de géodésie, ont accès au code P.
Ainsi un récepteur GPS qui capte les signaux d'au moins quatre satellites peut, en calculant les temps de propagation de ces signaux entre les satellites et lui, connaître sa distance par rapport à ceux-ci et, par trilatération, situer précisément en trois dimensions n'importe quel point placé en visibilité des satellites GPS avec une précision de 15 à 100 mètres pour le système standard. Le GPS est ainsi utilisé pour localiser des véhicules roulants, des navires, des avions, des missiles et même des satellites évoluant en orbite basse.
Concernant la précision, il est courant d'avoir une position horizontale à 15 mètres près. Le GPS étant un système développé pour les militaires américains, une disponibilité sélective a été prévue : certaines informations, en particulier celles concernant l'horloge des satellites, peuvent être volontairement dégradées et priver les récepteurs qui ne disposent pas des codes correspondants de la précision maximale. Pendant de nombreuses années, les civils n'avaient ainsi accès qu'à une faible précision (environ 100 m). Le 1er mai 2000, le président Bill Clinton a annoncé qu'il mettait fin à cette dégradation volontaire du service[2].
Certains systèmes GPS conçus pour des usages très particuliers peuvent fournir une localisation à quelques millimètres près. Le GPS différentiel (DGPS), corrige ainsi la position obtenue par GPS conventionnel par les données envoyées par une station terrestre de référence localisée très précisément. D'autres systèmes autonomes, affinant leur localisation au cours de 8 heures d'exposition parviennent à des résultats équivalents.
Dans certains cas, seuls trois satellites peuvent suffire. La localisation en altitude (axe des Z) n'est pas d'emblée correcte alors que la longitude et la latitude (axe des X et des Y) sont encore bonnes. On peut donc se contenter de trois satellites lorsque l'on évolue au-dessus d'une surface « plane » (océan, mer). Ce type d'exception est surtout utile au positionnement d'engins volants (avions, etc.) qui ne peuvent de toute façon pas se reposer sur le seul GPS, trop imprécis pour leur donner leur altitude. Mais il existe néanmoins un modèle de géoïde mondial nommé « Earth Gravity Model 1996 » ou EGM96 [3] associé au WGS 84 qui permet, à partir des coordonnées WGS 84, de déterminer [4] des altitudes rapportées au niveau moyen des mers avec une précision d'environ 1 mètre. Des récepteurs GPS évolués incluent ce modèle pour fournir des altitudes plus conformes à la réalité.
Historique
À l'origine le GPS était un projet de recherche de l'armée américaine. Il a été lancé dans les années 1960 et c'est à partir de 1978 que les premiers satellites GPS sont envoyés dans l'espace. En 1983, Ronald Reagan, à la suite de la mort des 269 passagers du Vol 007 Korean Airlines abattu par l'URSS a promis que la technologie GPS serait disponible gratuitement aux civils, une fois opérationnelle. Une seconde série de satellites est lancée à partir de 1989 en vue de constituer une flotte suffisante. En 1995, le nombre de satellites disponibles permet de rendre le système GPS opérationnel en permanence sur l'ensemble de la planète, avec une précision limitée à une centaine de mètres pour un usage civil. En 2000, Bill Clinton confirme l'intérêt de la technologie à des fins civiles et autorise une diffusion non restreinte des signaux GPS, permettant une précision d'une dizaine de mètres et une démocratisation de la technologie au grand public à partir du milieu des années 2000.
Les États-Unis continuent de développer leur système par le remplacement et l'ajout de satellites ainsi que par la mise à disposition de signaux GPS complémentaires, plus précis et demandant moins de puissance aux appareils de réception. Un accord d'interopérabilité a également été confirmé entre les systèmes GPS et Galileo afin que les deux systèmes puissent utiliser les mêmes fréquences et assurer une compatibilité entre eux.
Composition
Le système GPS est composé de 3 parties distinctes, appelées encore segments:
Le segment spatial
 La constellation des satellites du GPS.
La constellation des satellites du GPS.Il est constitué actuellement d'une constellation de 31 satellites (NAVSTAR pour Navigation Satellite Timing And Ranging). Ces satellites évoluent sur 6 plans orbitaux ayant une inclinaison d'environ 55° sur l'équateur[5]. Ils suivent une orbite quasi circulaire à une altitude de 20 000 à 20 500 km qu'ils parcourent en 11 heures 58 minutes 02 secondes, soit un demi jour sidéral. Ainsi les satellites, vus du sol, reprennent la même position dans le ciel au bout d'un jour sidéral.
Les générations successives de satellites sont désignées sous le nom de Blocs :
-
- Bloc I : 11 satellites mis en orbite entre 1978 et 1985. Fabriqués par Rockwell International, ils étaient prévus pour une mission moyenne de 4,5 ans et une durée de vie de 5 ans, mais leur durée de vie moyenne s'éleva à 8,76 années ; l’un d’entre eux est même resté pendant 10 ans en activité. Leur mission principale était de valider les différents concepts du système GPS. Aujourd’hui, plus aucun satellite du Bloc I n'est encore en service.
- Bloc II : Ce sont les premiers satellites opérationnels du système GPS. De nombreuses améliorations ont été apportées à ces satellites par rapport à la version précédente, notamment en ce qui concerne leur autonomie. Ils sont capables de rester 14 jours sans contact avec le segment sol tout en gardant une précision suffisante. Neuf satellites furent lancés en 1989 et 1990. Bien qu'on ait estimé leur durée de vie à 7,5 ans, la plupart d'entre eux sont restés en fonction pendant plus de dix ans. Il ne reste plus aujourd'hui aucun satellite du Bloc II actif.
- Bloc IIA : Lancés à partir de 1990, ils correspondent à une version perfectionnée des satellites du Bloc II initial. Ils ont été équipés pour fonctionner éventuellement en mode dégradé pour les civils. Ils sont équipés de 2 horloges atomiques au césium et 2 horloges au rubidium. Ils ont marqué à partir de 1993 le début de la phase opérationnelle du GPS. Actuellement 11 satellites du Bloc IIA sont actifs.
- Bloc IIR : Dotés d'une meilleure autonomie, ces satellites mis en orbite à partir de 1996 peuvent se transmettre mutuellement des messages sans aucun contact au sol, permettant ainsi aux opérateurs du système de pouvoir communiquer avec des satellites qui leurs sont inaccessibles dans une communication directe. Ils sont équipés de 3 horloges atomiques au rubidium. Vingt-et-un satellites du Bloc IIR ont été lancés, le dernier le 17 août 2009. C'est d'ailleurs le dernier de la série IIR. Vingt sont actifs. Les huit derniers sont désignés sous le sigle IIR-M parce qu'ils émettent un nouveau code civil (L2C) et un nouveau code militaire (M). Le IIR-M7 transportait en plus un émetteur expérimental transmettant sur la nouvelle fréquence L5 qui sera implantée sur les satellites du Bloc F [6].
- Bloc IIF : Les satellites Bloc IIF (Follow-On) construits par Boeing seront lancés à partir de 2010. Le programme vise à atteindre ainsi une constellation de 33 satellites.
- Bloc III : Les satellites du Bloc III sont encore en phase de développement et ont pour but de faire perdurer le GPS jusqu'en 2030 et plus. Les premières études sont lancées en novembre 2000. En mai 2008, Lockheed Martin Corporation a été choisi pour réaliser 32 satellites qui doivent être lancés à partir de 2014 [7]
 Un autre satellite GPS
Un autre satellite GPSLe segment de contrôle
C'est la partie qui permet de piloter et de surveiller le système. Il est composé de 5 stations au sol du 50th Space Wing de l'Air Force Space Command, basé à la Schriever Air Force Base dans le Colorado (la station maîtresse est basée à Colorado Springs) dans la base de Cheyenne Mountain. Leur rôle est de mettre à jour les informations transmises par les satellites (éphémérides, paramètres d'horloge) et contrôler leur bon fonctionnement .
 Trois récepteurs GPS
Trois récepteurs GPSLe segment utilisateur
Il regroupe l'ensemble des utilisateurs civils et militaires qui ne font que recevoir et exploiter les informations des satellites. Le système ne peut donc être saturé : le nombre maximum d'utilisateurs GPS est illimité.
Principe de fonctionnement
Le GPS fonctionne grâce au calcul de la distance qui sépare un récepteur GPS et plusieurs satellites. Les informations nécessaires au calcul de la position des 31 satellites étant transmise régulièrement au récepteur, celui-ci peut, grâce à la connaissance de la distance qui le sépare des satellites, connaître ses coordonnées.
Le signal émis
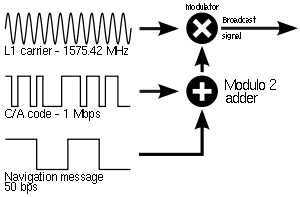 Signal C/A
Signal C/ALes satellites GPS émettent plusieurs signaux codés, à destination civile ou militaire. Le signal civil d'utilisation libre correspond au code C/A, émis sur la porteuse de 1 575 MHz.
Sur cette porteuse le signal de modulation est une séquence résultant de l'addition modulo 2 du code pseudo-aléatoire C/A à 1 Mbps et des données à 50 bps contenant les éphémérides des satellites et d'autres informations de navigation. C'est le code C/A qui sert dans les récepteurs par corrélation avec le signal reçu à déterminer l'instant exact d'émission de celui-ci.
Cet instant d'émission de référence du code C/A peut être modulé, à nouveau par un code pseudo-aléatoire, pour dégrader la détermination de position au sol. Ce chiffrement est appelé selective availability (SA), faisant passer la précision du système de 10 m environ à 100 m. Il a été abandonné en 2000 sous la pression des utilisateurs civils, et en raison du développement du DGPS qui le compensait totalement. Cette possibilité est cependant toujours présente à bord des satellites. La SA comporte aussi la possibilité de dégrader les informations permettant de calculer la position des satellites sur leur orbite ; elle n'a jamais été utilisée.
Mesure de la distance du récepteur par rapport à un satellite
Les satellites envoient des ondes électromagnétiques (micro-ondes) qui se propagent à la vitesse de la lumière. Connaissant celle-ci, on peut alors calculer la distance qui sépare le satellite du récepteur en connaissant le temps que l'onde a mis pour parcourir ce trajet.
Pour mesurer le temps mis par l'onde pour lui parvenir, le récepteur GPS compare l'heure d'émission incluse dans le signal et celle de réception de l'onde émise par le satellite. Cette mesure, après division par la vitesse du signal, fournit une pseudo-distance, assimilable à une distance, mais entachée d'une erreur de synchronisation des horloges du satellite et du récepteur et de dégradations comme celles dues à la traversée de l'atmosphère. L'erreur d'horloge peut être modélisée sur une période assez courte à partir des mesures sur plusieurs satellites.
Calcul de la position
Connaissant les positions des satellites à l'heure d'émission des signaux, et les pseudo-distances mesurées (éventuellement corrigées de divers facteurs liés notamment à la propagation des ondes), le calculateur du récepteur est en mesure de résoudre un système d'équations dont les quatre inconnues sont la position du récepteur (trois inconnues) et le décalage de son horloge par rapport au temps GPS. Ce calcul est possible dès que l'on dispose des mesures relatives à quatre satellites ; un calcul en mode dégradé est possible avec trois satellites seulement si l'on connaît l'altitude ; lorsque plus de quatre satellites sont visibles (ce qui est très souvent le cas), le système d'équations à résoudre est surabondant : la précision du calcul est améliorée, et on peut estimer les erreurs sur la position et le temps.
La précision de la position obtenue dépend, toutes choses égales par ailleurs, de la géométrie du système : si les satellites visibles se trouvent tous dans un cône d'observation de faible ouverture angulaire, la précision sera évidemment moins bonne que s'ils sont répartis régulièrement dans un large cône. Les effets de la géométrie du système de mesure sur la précision sont décrits par un paramètre : le D.O.P. (pour Dilution Of Precision : atténuation ou diminution de la précision) : le "HDOP" se réfère à la précision horizontale, le "TDOP" à la précision sur le temps, le "VDOP" à la précision sur l'altitude. La précision espérée est d'autant meilleure que le D.O.P est petit.
Décalage de l'horloge du récepteur
Article détaillé : Synchronisation GPS.La difficulté est de synchroniser les horloges des satellites et celle du récepteur. Une erreur d'un millionième de seconde provoque une erreur de 300 mètres sur la position ! Le récepteur ne peut bien entendu pas bénéficier d'une horloge atomique comme les satellites ; il doit néanmoins disposer d'une horloge assez stable, mais dont l'heure n'est a priori pas synchronisée avec celle des satellites. Les signaux de quatre satellites au moins sont nécessaires pour déterminer ce décalage, puisqu'il faut résoudre un système d'au moins quatre équations mathématiques à 4 inconnues qui sont la position dans les 3 dimensions plus le décalage de l'horloge du récepteur avec l'heure GPS (voir plus loin).
Prise en compte de la relativité
Outre l'incertitude associée à l'horloge du récepteur, la relativité restreinte et la relativité générale interviennent de façon fondamentale. La première implique que le temps ne s'écoule pas de la même façon dans le référentiel du satellite, parce que celui-ci possède une grande vitesse par rapport au référentiel du récepteur. La seconde explique que la plus faible gravité au niveau des satellites engendre un écoulement du temps plus rapide que celui du récepteur. Le système tient compte de ces deux effets relativistes dans la synchronisation des horloges. Par exemple les fréquences émises sont légèrement décalées (4,5 ppm) pour être reçues au sol avec leur valeur réelle.
Erreurs possibles
La plupart des récepteurs sont capables d'affiner leurs calculs en utilisant plus de 4 satellites (ce qui rend les résultats des calculs plus robustes) tout en ôtant les sources qui semblent peu fiables, ou trop proches l'une de l'autre pour fournir une mesure correcte, comme on le précise ci-dessus.
Le GPS n'est pas utilisable dans toutes les situations : le signal émis par les satellites NAVSTAR étant assez faible, la traversée des couches de l'atmosphère est un facteur qui perturbe la précision de la localisation; de même, les simples feuilles des arbres peuvent absorber le signal et rendre la localisation hasardeuse. De la même façon, l'effet canyon, particulièrement sensible en milieu urbain, consiste en l'occultation d'un satellite par le relief (un bâtiment par exemple); ou pire encore, en un écho du signal contre une surface qui n'empêchera pas la localisation mais fournira une localisation fausse : c'est le problème des multi-trajets des signaux GPS[5].
D'autres erreurs n'ayant pas de corrélation avec le milieux de prise de mesure ni la nature atmosphérique peuvent être présents. Ce sont des erreurs systématiques, tel les décalages orbitaux ou encore un retard dans l'horloge atomique qui calcule le temps où la mesure est prise. Un mauvais calibrage du récepteur (ou autres appareils électroniques du système) peut aussi produire une erreur de mesure[5].
Corrections troposphérique et ionosphérique
En l'absence d'obstacles, il reste quand même des facteurs de perturbation importants nécessitant une correction des résultats des calculs. Le premier est la traversée des couches basses de l'atmosphère, la troposphère. La présence d'humidité et les modifications de pression de la troposphère modifient l'indice de réfraction n et donc la vitesse et la direction de propagation du signal radio. Si le terme hydrostatique est actuellement bien connu, les perturbations dues à l'humidité nécessitent, pour être corrigées, la mesure du profil exact de vapeur d'eau en fonction de l'altitude, une information difficilement collectable, sauf par des moyens extrêmement onéreux comme les lidars, qui ne donnent que des résultats parcellaires. Les récepteurs courants intègrent un modèle de correction.
Le deuxième facteur de perturbation est l'ionosphère. Cette couche ionisée par le rayonnement solaire modifie la vitesse de propagation du signal. La plupart des récepteurs intègrent un algorithme de correction mais en période de forte activité solaire, cette correction n'est plus assez précise. Pour corriger plus finement cet effet, certains récepteurs bi-fréquences utilisent le fait que les deux fréquences L1 et L2 du signal GPS ne sont pas affectées de la même façon et recalculent ainsi la perturbation réelle.
Amélioration locale du calcul
Le DGPS
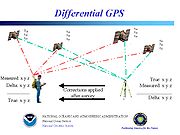 Principe du GPS différentiel
Principe du GPS différentielIl existe des dispositifs comme le GPS différentiel (en anglais Differential global positioning system ou DGPS), qui permettent d'améliorer la précision du GPS en réduisant la marge d'erreur du système.
Le principe du DGPS est basé sur le fait qu'en des points voisins, les effets des erreurs de mesure, comme d'ailleurs les effets des erreurs ajoutées volontairement, sont très semblables : il suffit donc d'observer en un point connu les fluctuations des mesures, et de les transmettre à un récepteur observant les mêmes satellites, pour permettre à celui-ci de corriger une grande partie des erreurs de mesure, qu'elles soient liées au satellite (horloge), aux conditions de propagation (effets troposphériques, etc.) ou à des fluctuations volontaires du signal émis. On peut ainsi passer d'une précision de l'ordre de 10 à 20 mètres à une précision de 5 à 3 mètres sur une grande zone (plusieurs centaines de kilomètres). Le DGPS est basé sur un ensemble de stations fixes, dont la position est connue exactement; elles reçoivent les signaux des mêmes satellites que les terminaux mobiles présents dans leur zone d'action, et elles estiment en permanence l'erreur locale de positionnement du GPS en comparant la position calculée avec leur position réelle. Cette information est transmise par radio ou par satellite (Inmarsat ou autre).
Le mode « différentiel » existe en plusieurs variantes ; la plus élaborée utilise la mesure de la phase des signaux reçus (GPS RTK), et non le code binaire pour calculer les pseudo-distances ; à partir d'une station située sur un point connu distant de quelques kilomètres, on obtient ainsi à l'aide du GPS des positions précises à quelques centimètres près dans les trois dimensions (GPS géodésique ou cinématique), ce qui permet de l'utiliser non seulement pour des levers, mais aussi pour des implantations en topographie. On peut même atteindre quelques millimètres avec des logiciels de traitement très élaborés utilisés en temps différé.
Le SBAS
Des systèmes complémentaires d'amélioration de la précision ont été développés (SBAS, Satellite based augmentation system) comme WAAS en Amérique du Nord, MSAS au Japon ou EGNOS en Europe. Celui ci développé par l'Union européenne est un réseau de quarante stations au sol dans toute l’Europe, couplé à des satellites géostationnaires, qui améliore la fiabilité et la précision des données du GPS, et corrige certaines erreurs. Certains de ces systèmes sont privés, et nécessitent un abonnement auprès d'un opérateur qui les diffuse (généralement par satellite). D'autres sont publics. De tels système peuvent avoir une couverture limitée (région, pays), et leur précision est variable.
Conversion des informations obtenues
Le positionnement 3D donne ainsi les coordonnées du récepteur dans l'espace, dans un repère à 3 axes et qui a pour origine le centre de gravité des masses terrestres (système géodésique). Pour que ces données soient exploitables, il faut convertir les données (X,Y,Z), en un ensemble plus parlant pour l'utilisateur : « latitude, longitude, altitude » (voir les systèmes de coordonnées)
C'est le récepteur GPS qui effectue cette conversion par défaut dans le système géodésique WGS84 (World Geodetic System 84), le système le plus utilisé au monde qui est une référence globale répondant aux objectifs d'un système mondial de navigation. À noter que l'altitude généralement fournie n'est pas toujours directement exploitable, du fait qu'il s'agit le plus souvent de l'altitude par rapport à l'ellipsoïde du système géodésique WGS84, dont le géoïde peut localement s'écarter sensiblement ; les récepteurs les plus élaborés disposent d'un modèle de géoïde, et indiquent une altitude comparable à celle des cartes. Les coordonnées obtenues peuvent naturellement être exprimées dans un autre système géodésique propre à une région ou un pays, et dans un autre système de projection. En France, le système de référence est encore souvent la NTF, bien que le système géodésique officiel soit désormais le RGF93, qui diffère très peu du WGS 84.
Comme le calcul des coordonnées géographiques du récepteur intègre obligatoirement le calcul du décalage de l'horloge (ou oscillateur interne) du récepteur par rapport au temps GPS et donc à l'UTC), l'heure indiquée par cette horloge est donc précisément soit le temps UTC soit le temps légal en usage à l'emplacement du récepteur. La fréquence de l'oscillateur peut être utilisée pour asservir précisément un système extérieur en fréquence ou synchroniser des horloges éloignées. C'est le cas par exemple des réseaux de télécommunications dont les équipements nécessitent une fréquence avec une stabilité spécifiée pour fonctionner correctement. Beaucoup de réseaux à travers le monde sont ainsi synchronisés par des récepteurs GPS.
Ainsi le GPS s'avère accessible aux transporteurs routiers, avions, navigateurs, randonneurs, géomètres, forestiers, automobilistes, etc.
Inconvénients du GPS
Dépendance stratégique
Le GPS est un système conçu par et pour l'armée des États-Unis et sous son contrôle. Le signal pourrait être dégradé, occasionnant ainsi une perte importante de sa précision, si le gouvernement des États-Unis le désirait. C'est un des arguments en faveur de la mise en place du système européen Galileo qui est, lui, civil et dont la précision théorique est supérieure. La qualité du signal du GPS a été dégradée volontairement par les États-Unis jusqu'au mois de mai 2000, la précision d'un GPS en mode autonome était alors d'environ 100 mètres. Depuis l'arrêt de ce brouillage volontaire, supprimé par le président américain Bill Clinton, la précision est de l'ordre de 5 à 15 mètres.
Confiance exagérée dans ses performances
En démontrant ses performances exceptionnelles, puis en se vulgarisant, le GPS a modifié la perception du positionnement et de la navigation au sein même de la société. De ce fait, l'opinion publique, les institutions et les pouvoirs publics admettent de plus en plus difficilement qu’il soit possible de « ne pas savoir où l’on est » et dans les applications tant professionnelles que pour les loisirs, il est si facile à exploiter qu’il semble pouvoir décharger complètement les pratiquants des tâches de positionnement et navigation.
C’est peut-être le principal danger du GPS. Son usage est aux risques et périls de l'utilisateur; il n'offre, a priori, aucune garantie et aucune responsabilité en cas d'incident.
En effet, en dépit de sa fiabilité et de sa précision, un tel système ne peut être fiable à 100%. En outre, sa précision peut être mise en défaut car la continuité du calcul reste fragile et peut être interrompue ou perturbée par :
- une cause extérieure de mauvaise réception : parasite, orage, forte humidité
- un brouillage radioélectrique volontaire ou non
- une manœuvre au cours de laquelle la réception est temporairement masquée
- l’alignement momentané de quelques satellites qui empêche le calcul précis (incertitude géométrique temporaire)
- un incident dans un satellite
Le Bureau d'enquêtes et d'analyses des accidents de l'aviation civile française a réalisé une étude sur les accidents et incidents pour lesquels l'usage du GPS est identifié comme facteur déclenchant ou contributif de l'évènement et il s'avère que dans nombre de cas, c'est une trop grande confiance en cet outil qui a participé à l'accident ou incident. Ainsi, il est fortement suggéré que les usagers des GPS et en particulier les professionnels l'utilisant, soient clairement informés des limites de cet outil qui ne doit être qu'une aide et non un moyen de navigation primaire [8].
Référence géodésique ou cartographique
Des problèmes cartographiques peuvent également entrer en jeu, car la position calculée par un récepteur GPS se réfère au système géodésique WGS 84, qui n'est pas généralement le système de référence pour les cartes terrestres nationales. La légende de chaque carte signale toujours le système géodésique de référence utilisé et la majorité des récepteurs GPS modernes peuvent être programmés pour exprimer la position calculée dans un système géodésique différent du WGS 84, et éventuellement dans la projection cartographique souhaitée (par exemple UTM ou Lambert), plutôt qu'en coordonnées géographiques.
GPS et surveillance
Dans l'esprit du grand public, un lien direct est effectué entre GPS et surveillance, le terme familier péjoratif de flicage est généralement employé par les détracteurs de tels systèmes. Toutefois, ces outils de surveillance qui, parce qu'ils touchent à des questions de vie privée occasionnent des débats de société, n'incorporent le GPS que comme l'une des briques technologiques nécessaires à son fonctionnement.
Le dispositif de localisation GPS en lui-même est un système passif qui se contente de recevoir les signaux des satellites et d'en déduire une position. Le réseau des satellites GPS ne reçoit donc aucune information d'éventuels systèmes de surveillance au sol (ou embarqués dans un aéronef ou un navire) et demeure techniquement incapable d'effectuer la surveillance d'un territoire d'une quelconque façon.
En revanche, notamment dans le domaine des transports, des systèmes déployés dans les véhicules adjoignent un dispositif de transmission de l'information obtenue avec le GPS. Ce dispositif peut fonctionner en temps réel, il s'agit alors bien souvent d'une liaison de téléphonie mobile data ; ou fonctionner en temps différé, les données sont alors déchargées a posteriori par un système physique ou de radio à courte portée.
Leur application est généralement réservée aux professionnels pour suivre une flotte de camions, véhicules de transports de passagers (y compris les taxis), de véhicules de commerciaux, de dépannage ou d'intervention. Les objectifs de ces outils de suivi de flotte sont pour un employeur de s'assurer que son salarié effectue effectivement ce qu'il est censé faire sur le terrain ou que le véhicule n'a pas été détourné, mais aussi d'améliorer la gestion d'une flotte de véhicules, notamment dans les transports.
Les systèmes de localisation automatique de sécurité , comme l'AIS en navigation maritime et aérienne, combinent un récepteur GPS et un émetteur, améliorant la sécurité anti-collision et la recherche des naufragés. L'APRS utilise le même principe, il est géré par des radioamateurs bénévoles.
Autres systèmes de positionnement par satellite
Article détaillé : système de positionnement par satellite.Il existe d'autres systèmes de positionnement par satellite opérationnels, sans atteindre cependant la couverture ou la précision du GPS :
- GLONASS est le système russe, qui n'est pas pleinement opérationnel
- Beidou est le système de positionnement créé par la République populaire de Chine; il est opérationnel uniquement sur le territoire chinois et régions limitrophes (il utilise des satellites géostationnaires, au nombre de quatre actuellement)
- L'Inde prépare également son système de positionnement
- Enfin il y a Galileo qui est le système civil de l'Union européenne en cours de test depuis 2004. À terme, il est destiné à être au moins équivalent au GPS en termes de couverture et de précision.
Notes et références
- ↑ Annual Report to the President and the Congress, U.S. Government Printing Office Superintendent of Documents, 1971
- ↑ (en) Bill Clinton, « President Clinton: Improving the Civilian Global Positioning System (GPS) », 1er mai 2000, NARA
- ↑ (fr) EGM96 - The NASA GSFC and NIMA Joint Geopotential Model, 18 novembre 2004, NASA. Consulté le 16 janvier 2008
- ↑ (fr) NGA EGM96 Geoid Calculator, 16 juin 2006, National Geospatial-Intelligence Agency. Consulté le 16 janvier 2008
- ↑ a , b et c (fr) Guide pratique du GPS (Paul Correia, Eyrolles 2006)
- ↑ Les signaux L1 et L2 de ce satellite sont actuellement inutilisables à cause d'une interférence entre ces signaux et la charge utile L5
- ↑ Air et cosmos n° 2126, 23 mai 2008
- ↑ (fr) Étude sur les événements GPS, août 2005, Bureau d'enquêtes et d'analyses, p. 19 et 20. Consulté le 16 janvier 2008
Bibliographie
- F. Duquenne et al.: GPS localisation et navigation par satellites, 2ème édition revue et augmentée, Hermès,2005.
- P. Correia : Guide pratique du GPS , Eyrolles, 2006
- SHOM : GPS et Navigation Maritime, 1996
- GPS Joint Program Office : Interface Control Document ICD-GPS-200 Rev D [1]
Voir aussi
- Automatic Vehicle Location (ou AVL).
- Beidou, le système de positionnement chinois.
- Chartplotter
- Confluence project.
- DORIS, expérience d'altimétrie par satellites.
- Differential global positioning system
- EGNOS
- Galileo, le système de positionnement européen.
- Glonass, le système de positionnement russe.
- Géolocalisation
- GPX (format de fichier)
- Liste des logiciels SIG
- Système d'information géographique.
- Systèmes de coordonnées
- Synchronisation GPS
Liens externes
- (fr) Le Navstar GPS
- (en) Page de l'USAF sur le GPS
- (fr) Le GPS en topographie
- (fr) Article sur le fonctionnement du GPS
Système de positionnement par satellites Opérationnels :  GPS |
GPS |  /
/  GLONASS
GLONASSEn développement :  Galileo |
Galileo |  Beidou |
Beidou |  IRNSS
IRNSSHors service : TransitVoir aussi : EGNOS | WAAS | LAAS  Portail de la géographie
Portail de la géographie
Catégories : Positionnement par satellites | Topographie | Instrument de navigation | Satellite militaire -



Wikimedia Foundation. 2010.