- Équation d'un cercle
-
Cercle
 Pour les articles homonymes, voir cercle (homonymie).
Pour les articles homonymes, voir cercle (homonymie).Un cercle est une courbe plane fermée constituée des points situés à égale distance d'un point nommé centre. La valeur de cette distance est appelée rayon du cercle. Celui-ci étant infiniment variable, il existe donc une infinité de cercles pour un centre quelconque, dans chacun des plans de l'espace.
Dans le plan euclidien, il s'agit du « rond » qui est associé en français au terme de cercle. Dans un plan non euclidien ou dans le cas de la définition d'une distance non euclidienne, la forme peut être plus complexe. Dans un espace de dimensions quelconque, l'ensemble des points placés à une distance constante d'un centre est appelé sphère.
D'autres formes peuvent être qualifiées de « rondes » : les surfaces et solides dont certaines sections planes sont des cercles (cylindres, cônes, etc)[1].
Pendant longtemps, le langage courant employait ce terme autant pour nommer la courbe (circonférence) que la surface qu'elle délimite. De nos jours, en mathématiques, le cercle désigne exclusivement la courbe ; la surface étant appelée disque.
Sommaire
Géométrie euclidienne
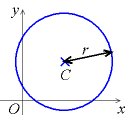 Cercle de centre C et de rayon r dans un plan muni d'un repère orthonormé
Cercle de centre C et de rayon r dans un plan muni d'un repère orthonormé
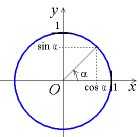 Cercle unité : centré sur l'origine du repère et de rayon 1 ; définition du sinus et du cosinus
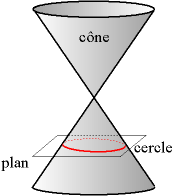
Cercle unité : centré sur l'origine du repère et de rayon 1 ; définition du sinus et du cosinus Un cercle est une section droite d'un cône.
Un cercle est une section droite d'un cône.Le cercle est une ellipse dont les foyers sont confondus au centre du cercle ; la longueur du grand axe est égale à la longueur du petit axe. C'est une conique dont l'excentricité e vaut 0. Elle peut être obtenue par l'intersection d'un plan avec un cône de révolution lorsque le plan est perpendiculaire à l'axe de révolution du cône (on parle parfois de « section droite » du cône).
Dans un plan muni d'un repère orthonormé, le cercle unité ou cercle trigonométrique est le cercle dont le centre est l'origine du repère, et dont le rayon vaut 1.
 Représentation conventionnelle d'un cercle en dessin industriel
Représentation conventionnelle d'un cercle en dessin industrielEn dessin industriel, un cercle est le plus souvent représenté avec son axe horizontal et son axe vertical (en traits d'axe : trait fin composé de tirets longs et courts), ou bien simplement avec son centre matérialisé par une croix droite « + » en traits fins. Une forme de révolution, pleine ou creuse (cylindre, cône, sphère) et vue selon l'axe de révolution est représentée par un cercle.
Définitions
 définition d'objets géométriques liés au cercle
définition d'objets géométriques liés au cercle- Une corde est un segment de droite dont les extrémités se trouvent sur le cercle.
- Un arc est une portion de cercle délimitée par deux points.
- Une flèche est le segment reliant les milieux d'un arc de cercle et d'une corde définis par deux mêmes points.
- Un rayon est un segment de droite joignant le centre à un point du cercle.
- Un diamètre est une corde passant par le centre ; c'est un segment de droite qui délimite le disque en deux parts égales. Le diamètre est composé de deux rayons colinéaires ; sa longueur est 2r.
- Un disque est une région du plan limitée par un cercle.
- Un secteur circulaire est une partie du disque comprise entre deux rayons.
- Un angle au centre est un angle formé par deux rayons du cercle.
Propriétés géométriques
Voici quelques propriétés géométriques du cercle.
Mesures
La longueur d'un arc sous-tendu par un angle α, exprimé en radians, est égale à αr. Ainsi, pour un angle de 2π (un tour complet), le périmètre (la circonférence) du cercle vaut 2πr.
La longueur d'une corde sous-tendue par un angle α est égale à 2rsin(α / 2).
L'aire du disque délimité par un cercle de rayon r vaut πr2 ; si l'on prend une corde de longueur l donnée et que l'on s'en sert pour délimiter une surface fermée, la surface ayant la plus grande aire est délimitée par un cercle.
Selon la légende de la fondation de Carthage, le souverain avait permis aux Phéniciens de fonder une ville dont le pourtour serait délimité par une peau de vache ; Didon en fit une grande lanière et choisit une forme circulaire pour avoir la plus grande surface.
Tangente
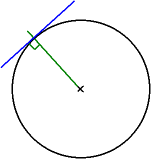 Tangente perpendiculaire au rayon
Tangente perpendiculaire au rayonLa tangente en un point du cercle est perpendiculaire au rayon en ce point.
Cette propriété a des applications en optique géométrique : un rayon lumineux passant par le centre d'un miroir sphérique repart en sens inverse selon la même direction (on a une réflexion perpendiculaire au miroir). Si l'on met une ampoule au centre d'un miroir sphérique, la lumière est renvoyée de l'autre côté, ce qui permet par exemple de « rabattre » la lumière vers un miroir parabolique (principe du contre-miroir).
Médiatrice
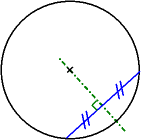 La médiatrice d'une corde passe par le centre.
La médiatrice d'une corde passe par le centre.On peut montrer que la médiatrice d'une corde passe par le centre du cercle. Ceci permet de trouver le centre d'un cercle : il suffit de tracer deux cordes non parallèles et de rechercher l'intersection de leurs médiatrices.
On peut aussi montrer que les trois médiatrices d'un triangle sont concourantes et que le point de concours est le centre du cercle passant par les trois sommets, appelé cercle circonscrit au triangle.
Cercle et triangle rectangle
 Triangle rectangle inscrit dans un cercle
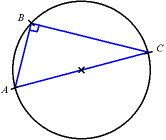
Triangle rectangle inscrit dans un cerclePrenons trois points du cercle A, B et C, dont deux — A et C — sont diamétralement opposés (c'est-à-dire sont les intersections du cercle avec un diamètre). Alors, ABC est un triangle rectangle en B.
Ceci découle du fait que la médiane de l'angle droit vaut la moitié de l'hypoténuse (on a un rayon et un diamètre) ; ceci est une propriété du triangle appelé dans les pays anglo-saxons le théorème de Thalès.
Angle inscrit, angle au centre
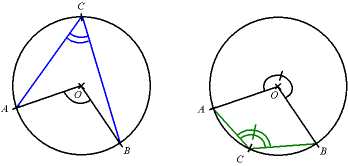
 Illustration de la relation entre les secteurs angulaires interceptant un même arc.Article détaillé : Théorème de l'angle inscrit et de l'angle au centre.
Illustration de la relation entre les secteurs angulaires interceptant un même arc.Article détaillé : Théorème de l'angle inscrit et de l'angle au centre.Prenons deux points distincts A et B du cercle. O est le centre du cercle et C est un autre point du cercle. Alors, on a

Pour l'angle au centre
 , il faut considérer le secteur angulaire qui intercepte l'arc opposé à l'arc contenant C.
, il faut considérer le secteur angulaire qui intercepte l'arc opposé à l'arc contenant C.Cette propriété est utilisée dans les appareils d'analyse spectrale par dispersion de longueur d'onde, c'est la notion de cercle de focalisation ou cercle de Rowland.
Points d'intersection avec une droite
Soit une droite (P1P2), ensemble des points P(x,y) tels que : P = P1 + k(P2 − P1).
(x1,y1) et (x2,y2) étant les coordonnées des 2 points P1 et P2 de la droite et k un paramètre,
les coordonnées (x,y) d'un point P de la droite sont données par les deux équations paramétriques :
x = x1 + k(x2 − x1),
y = y1 + k(y2 − y1).
Un cercle de centre I(x3,y3) et de rayon r est défini par l'équation (x − x3)2 + (y − y3)2 = r2. (C'est un simple calcul d'hypoténuse).
La substitution des coordonnées (x,y) d'un point de la droite dans l'équation du cercle donne une équation du deuxième degré d'inconnue k Le discriminant de la forme b2 − 4ac est donné par les coefficients :
a = (x2 − x1)2 + (y2 − y1)2,b = 2{(x2 − x1)(x1 − x3) + (y2 − y1)(y1 − y3)},
 .
.Trois cas pour b2 − 4ac :
- Si b2 − 4ac < 0 : pas d'intersection :
- Si b2 − 4ac = 0 : la droite est tangente en un point au cercle. Dans ce cas

- Si b2 − 4ac > 0 : il existe deux points d'intersection avec
 et
et  .
.Rapport des cercles inscrits
 Illustration de l'unique disposition de N cercles inscrits.
Illustration de l'unique disposition de N cercles inscrits.- Rayon R' des 2 plus grands cercles inscrits dans le cercle de rayon R et de surface S

- Rayon R' et surface S' des 3 plus grands cercles inscrits
![R' = \frac{R}{1+\sqrt{\frac{4}{3}}}\qquad 3S' = \frac{S}{ \left(\frac{2+\sqrt[]{3}}{3}\right)^2}](/pictures/frwiki/49/1d1b9f2d6d042d75220196ddbcff721f.png)
- Rayon R' et surface S' des 4 plus grands cercles inscrits
- Rayon R' des 5 plus grands cercles inscrits
- Rayon R' des 7 plus grands cercles inscrits (1 cercle au centre entouré de 6)

Puissance d'un point par rapport à un cercle
Article détaillé : Puissance d'un point par rapport à un cercle.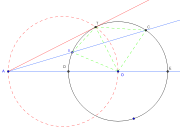 Puissance d'un point par rapport à un cercle
Puissance d'un point par rapport à un cercleSi M est un point et Γ est un cercle de centre O et de rayon R, alors, pour toute droite passant par M et rencontrant le cercle en A et B, on a
 .
.Cette valeur ne dépend pas de la droite choisie, mais seulement de la position de M par rapport au cercle.
On peut remarquer que
- si M est à l’extérieur du cercle,
 ;
; - si M est à l’intérieur du cercle,
 ;
;
On appelle alors puissance du point M par rapport au cercle Γ le produit des mesures algébriques MA et MB. Ce produit est indépendant de la droite choisie et vaut toujours OM2 − R2.
Lorsque le point M est à l'extérieur du cercle, il est possible de mener des tangentes au cercle. En appelant T le point de contact d'une de ces tangentes, d'après le théorème de Pythagore dans le triangle OMT, la puissance de M est MT2. L'égalité

est suffisante pour affirmer que la droite (MT) est tangente au cercle.
La puissance d'un point permet de vérifier que quatre points sont cocycliques : en effet, si
- A, B, C, D sont quatre points tels que (AB) et (CD) se coupent en M et
- MA×MB = MC×MD (en mesures algébriques),
alors les quatre points sont cocycliques.
Équations
Dans un plan muni d'un repère orthonormé, l'équation du cercle de centre C(a,b) et de rayon r est :
(x − a)2 + (y − b)2 = r2 cette équation est en fait une application du théorème de Pythagore pour le triangle rectangle formé par le point du cercle et sa projection sur les deux rayons parallèles aux axes ; l'équation du cercle unité est donc
x2 + y2 = 1. En mettant y en évidence, on obtient les équations cartésiennes du cercle :
 .
.Les équations paramétriques du cercle sont
soit pour le cercle unité

On peut également déterminer une équation pour le cercle de diamètre [AB] :
(x − xA)(x − xB) + (y − yA)(y − yB) = 0, soit encore
x2 + y2 − (xA + xB)x − (yA + yB)y + xAxB + yAyB = 0. On peut enfin exprimer le rayon, la corde et la flèche selon deux d'entre eux :

Voir aussi
- Algorithme de tracé d'arc de cercle de Bresenham
- Cercle chromatique
- Cercle polaire
- Cercle vicieux
- Cercle vertueux
- Cercle d'Euler
- Livre III des Éléments d'Euclide
- Problème de Napoléon
- Sphère
Sources
- ↑ Voir la définition de l'adjectif rond dans le Trésor de la Langue Française Informatisé.
 Portail de la géométrie
Portail de la géométrie
Catégories : Courbe | Cercle et sphère

Wikimedia Foundation. 2010.