- Théorème d'inversion locale
-
En mathématiques, le théorème d'inversion locale est un résultat de géométrie différentielle. Il indique que si une fonction f est continûment différentiable en un point, si sa différentielle en ce point est une bijection bicontinue, c'est-à-dire qu'elle est continue ainsi que sa réciproque, alors localement f est inversible et son inverse est différentiable.
Ce théorème est équivalent à celui des fonctions implicites, son usage est largement répandu. On le trouve par exemple utilisé, sous une forme ou une autre, dans certaines démonstrations des propriétés du multiplicateur de Lagrange. Il est aussi utilisé pour démontrer le théorème du redressement.
Sa démonstration utilise une version simple du théorème du point fixe. Elle permet d'établir le résultat dans diverses configurations, un espace vectoriel réel de dimension finie, un espace de Banach ou encore une variété différentielle. Il existe une version plus forte : le théorème d'inversion globale.
Sommaire
Énoncés
Il en existe plusieurs formes, celle proposée ici est relativement générale[1] :
Théorème d'inversion locale — Soit f une application de U dans F, où U est un ouvert d'un espace de Banach réel et F un espace de Banach et soit x un point de U. Si f est de classe Cp, avec p strictement positif et si la différentielle de f au point x est un isomorphisme bicontinu, alors il existe un voisinage ouvert V de x et un voisinage ouvert W de f(x) tels que f se restreigne en une bijection de V dans W dont la réciproque est de classe Cp.
Cet énoncé mérite quelques explications. Un espace de Banach est un espace vectoriel normé complet pour la distance induite. Un exemple important est celui des espaces vectoriels réels de dimension finie[2]. Certaines versions limitent d'ailleurs leur énoncé à ce cas particulier[3].
Une différentielle correspond à la généralisation de la notion de dérivée. Un accroissement f(x + h) - f(x), si h est petit, est presque égal à f' (x).h. A priori cette égalité possède un sens si f est une fonction de R dans R et le terme f'(x) désigne la dérivée de la fonction f au point x. Si la fonction est définie d'un espace vectoriel dans un autre, ce résultat se généralise mais f'(x).h, qui est alors noté dfx ou Dfx, est une application linéaire continue appelée différentielle de f au point x. L'application, qui à x associe Dfx, est la différentielle de f, c'est encore une application d'un espace vectoriel dans un autre, on peut parfois la différentier. Si cette opération est réalisable p fois, et si la différentielle pième est continue, l'application f est dite de classe Cp.
On dispose du corollaire suivant[1] :
Théorème d'inversion globale — Sous les hypothèses du théorème précédent, si f est de plus injective et si pour tout x de U la différentielle Dfx de f au point x est un isomorphisme bicontinu, alors f(U) est un ouvert et la bijection réciproque, de f(U) dans U, est de classe Cp.
Remarque : Une application bijective de classe Cp dont la réciproque est aussi de classe Cp est appelée un Cp difféomorphisme.
Approche intuitive
Fonction réelle de la variable réelle
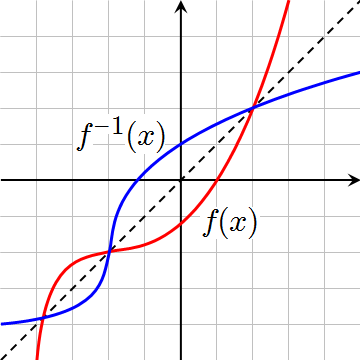
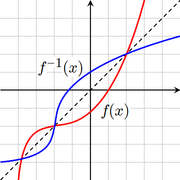 Le graphe de la fonction réciproque de f est le symétrique du graphe de f par rapport à la première bissectrice.
Le graphe de la fonction réciproque de f est le symétrique du graphe de f par rapport à la première bissectrice.
Le cas de la fonction réelle de la variable réelle est un peu particulier.
Si f est une fonction continue et strictement monotone sur un intervalle J à valeurs réelles, alors f(J) est aussi un intervalle, f est bijective de J sur f(J), et la bijection réciproque est continue (voir l'article Théorème de la bijection). Le graphe de f -1 est le symétrique de celui de f par rapport à la première bissectrice, d'équation x = y, comme illustré sur la figure de droite. Dans le cas particulier d'une fonction réelle de la variable réelle, les résultats sont donc plus globaux et nécessitent des hypothèses de nature différente. Ils ne sont pas généralisables, car un espace vectoriel ne dispose pas d'un ordre à l'image de l'ensemble des nombres réels.
Si de plus f est dérivable en un point a et que cette dérivée en a est non nulle alors f -1 est dérivable au point f(a) (voir l'article Opérations sur les dérivées). Pour cette propriété-ci, par contre, la méthode se généralise parfaitement.
Dimension deux

La dimension 2 indique déjà l'existence d'un comportement différent du paragraphe précédent. Illustrons-le pour la fonction f de R2 dans R2 définie par :

La figure de gauche indique comment le plan est transformé. L'image de la figure située en haut est illustré au dessous. Le carré vert a été déformé de manière bijective. A partir d'un point de l'image du carré vert, il est possible de reconstituer le point du carré d'origine. L'application f satisfait les hypothèses du théorème de l'article. Pour vérifier que l'application est localement inversible, il est utile de déterminer sa différentielle. Sa matrice, dite matrice jacobienne est la suivante :


Pour savoir si la différentielle est un isomorphisme, le plus simple est de calculer son déterminant, appelé déterminant jacobien, ou simplement jacobien. Il est égal à exp(2x) et n'est jamais nul. L'application est en conséquence localement inversible en chaque point. A la différence des fonctions différentiables et définies sur un intervalle de R, cette propriété n'implique pas le caractère globalement injectif de f. Ajouter 2π à la deuxième coordonnée ne modifie pas l'image par f, ainsi chaque point de R2 possède une infinité d'antécédents, à l'exception de l'origine qui n'en a pas. Cette fonction peut être vue comme l'exponentielle complexe. Sa réciproque, le logarithme complexe ne peut être défini sur C tout entier et il existe plusieurs méthodes pour le définir.
Un deuxième exemple est donné par la fonction suivante g dont le jacobien est égal à x2/2 :

Cet exemple est illustré avec les mêmes conventions sur la figure de droite. L'image de la zone bleue au haut à gauche est transformé en une espèce de papillon. L'application n'est pas inversible au voisinage d'un point ayant une première coordonnée nulle. Intuitivement, il est visible que les deux figures bleues ne sont pas équivalentes. Si l'on retranche le point central à celle de droite, la figure comporte alors deux composantes connexes. Le retrait d'un point quelconque sur la figure bleue à gauche ne produit jamais cet effet.
Usages
Article détaillé : Théorème des fonctions implicites.
Les usages du théorème d'inversion locale sont multiples et touchent différentes branches des mathématiques. L'une d'entre elles est la branche d'origine du théorème : la géométrie différentielle. Le théorème d'inversion locale est utilisé soit sous sa forme d'origine, soit sous la forme du théorème des fonctions implicites, qui lui est équivalent au sens où chacun peut se déduire de l'autre.

On utilise le théorème des fonctions implicites pour étudier les figures géométriques définies sous forme d'équations, illustrées par l'exemple suivant :
x(x2 + y2) − 10(x2 − y2) = 0. Si le terme de gauche est vu comme une fonction f de R2 à valeurs dans R, la figure du plan étudiée est l'intersection du graphe de la fonction f, illustré à droite, et du plan d'équation z = 0. De manière plus générale, une variété différentielle correspond à la généralisation de courbes ou surfaces régulières, en dimension quelconque. Il existe deux manières de les définir localement, à travers une équation, soit cartésienne, soit paramétrique. Le théorème des fonctions implicites montre l'équivalence de ces deux manières.
En calcul différentiel, le multiplicateur de Lagrange permet de trouver des extrema sous contrainte. Si U est un ouvert d'un espace euclidien, l'objectif est de trouver un extremum d'une fonction f définie sur les points x de U et à valeurs dans R vérifiant l'équation g(x) = 0, où g est une fonction à valeurs dans un autre espace euclidien. Le théorème des fonctions implicites fournit une méthode pour résoudre ce problème.
On trouve encore le théorème d'inversion locale dans les équations différentielles, où il est l'outil de démonstration du théorème du redressement d'un flot. Une équation différentielle explicite possède une forme équivalente à (1) x' = f(t, x). Si la fonction f est indépendante de t l'équation est dite autonome, la fonction est un champ de vecteur et les solutions de l'équation possèdent des graphes tangents en un point x au vecteur f(x), à l'image de la figure rouge et jaune, à gauche. Le théorème du redressement d'un flot montre que localement, l'équation différentielle est équivalente à celle ayant un champ constant, à l'image de la représentation bleue et jaune, encore à gauche.
Les exemples cités supposent généralement que les espaces vectoriels considérés sont de dimension finie. Tel n'est pas toujours le cas. Une manière d'exprimer les solutions de l'équation (1) est de considérer le flot, c'est-à-dire la fonction α qui, à un instant t et à un point x, associe le point image de la solution s de (1) vérifiant l'égalité s(0) = x. Si la fonction f est de classe Cp, alors le flot α l'est aussi. Une démonstration fait usage du théorème des fonctions implicites dans le contexte d'espaces vectoriels de dimension infinie.
Démonstration
Étude d'un cas
 Le théorème du point fixe permet de montrer l'inversion locale.
Le théorème du point fixe permet de montrer l'inversion locale.Pour comprendre le principe de la démonstration, illustrons-la sur la fonction f de C dans C, qui à z associe z2. L'objectif est de l'inverser au voisinage du point 1/2(1 + i). On peut considérer cette application comme étant celle de R2 dans lui même, qui à (x, y) associe (x2 - y2, 2.x.y). Cette application est partout différentiable, et en particulier autour du point z0 de coordonnées (1/2, 1/2). Le calcul de la matrice jacobienne Jz donne :

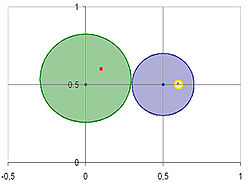
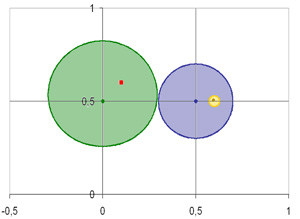
Sa différentielle est inversible au point z0 et l'on note λ sa réciproque. L'objectif est de déterminer l'existence d'une application réciproque de f sur, par exemple le disque D de centre z0 et de rayon 1/5. Cette zone est illustrée en bleu sur la figure de droite et son image en vert. Pour cela, il faut montrer qu'un point quelconque z1 de la zone verte, possède un unique antécédent par f dans la zone bleue. Dans l'exemple on a choisi z1 de coordonnées (0,1, 0,6), illustré en rouge. Cette question est relativement classique, une méthode pour y parvenir est d'utiliser le théorème du point fixe. Trois hypothèses doivent pour cela être vérifiées : l'ensemble considéré doit être complet, l'application gy doit être d'un ensemble E dans lui même et elle doit être k-lipschitzienne avec k strictement plus petit que 1. L'espace C est complet, il ne reste plus qu'à construire la bonne fonction g. On la définit de D dans D par :

Au point z0, comme λ désigne l'inverse de la différentielle de f en z0, la différentielle de g est nulle. Il existe un voisinage sur lequel la norme de la différentielle de g est inférieure à 1/2, car g est continument différentiable. Le disque D est dans cette zone. Comme D est dans la zone contractante de g, cet ensemble est stable par g. L'image du disque D par g correspond à la zone jaune, une nouvelle itération donne une figure symbolisée par un point que la petitesse rend presque invisible sur la figure. En réitérant le processus, on obtient bien un point fixe et le théorème associé indique que ce point est unique. Si ce point fixe est noté ζ, il vérifie :

Dire que ζ est un point fixe de g revient exactement à dire qu'il est antécédent de z1 par f, ce qui montre à la fois son existence et son unicité.
Existence d'une réciproque locale
L'approche précédente possède un avantage : nulle part il n'est fait usage de la dimension de l'espace vectoriel E contenant l'ouvert U, domaine de définition de f. En conséquence, la démonstration est naturellement valable sur un espace vectoriel normé complet quelconque, c'est-à-dire un espace de Banach. On utilise les mêmes notations que dans l'énoncé du théorème, f est une fonction de classe Cp (p > 0) de U dans un espace vectoriel normé F. Par translations, on se ramène[1] au cas où x = 0E et f(x) = 0F. On suppose donc que f(0E) = 0F et que la différentielle de f au point 0E est un isomorphisme continu de E dans F dont la réciproque est aussi continue[4]. De plus, par composition par cet isomorphisme, on se ramène[1] au cas où F = E et où la différentielle de f au point 0E (noté désormais 0) n'est autre que l'application identité de E.
Soit φ l'application définie sur U par :
φ(x) = x − f(x). La différentielle de l'application φ est nulle en 0 et, comme cette différentielle est continue, il existe un réel strictement positif r tel que la boule fermée Br de centre 0 et de rayon r soit incluse dans U et tel que la norme de la différentielle de φ soit toujours inférieure à 1/2 sur cette boule. Définissons deux voisinages ouverts V et W de 0 par W = Br/2, V = Br∩f -1(W) et démontrons que de V dans W, f est bijective.
Pour prouver la surjectivité, considérons, pour tout point y de W, la fonction φy définie sur Br par :
φy(x) = y + φ(x). L'inégalité des accroissements finis montre que φ est 1/2-lipschitzienne sur Br. On en déduit d'une part que sa translatée φy l'est aussi et d'autre part, que φy envoie Br dans elle-même car pour tout x dans Br, la norme de φ(x) est inférieure à r/2, tout comme celle de y. Le théorème du point fixe montre l'existence d'un point appartenant à Br (donc à V), fixé par φy, donc envoyé par f sur y.
L'injectivité s'obtient en utilisant à nouveau que φ est 1/2 lipschitzienne. Pour tous x1 et x2 dans V, si l'on note y1 et y2 leurs images par f, on a :
 ,
,ce qui se réécrit :

et permet de conclure.
Régularité de la réciproque
Il s'agit maintenant de montrer que la réciproque de f est de classe Cp sur W.
Remarquons d'abord que pour tout x dans V, l'application linéaire Dfx est inversible et d'inverse continu. En effet, Dfx = idE - (Dφ)x et (Dφ)x est de norme inférieure à 1/2, donc la série

est convergente et sa somme est inverse de Dfx, de norme inférieure à 2.
Soient y dans W et x son antécédent dans V par f, démontrons qu'au point y, f -1 est différentiable et que sa différentielle n'est autre que l'inverse de Dfx. Pour tout vecteur k de E tel que y+k soit encore dans W, notons x+h l'antécédent dans V de y+k par f. De

on déduit :

la dernière égalité venant du fait (démontré plus haut dans la preuve d'injectivité) que ||h|| ≤ 2||k||.
Il reste encore à montrer que la réciproque de f est de classe Cp. On vient de prouver l'existence de la différentielle de la réciproque de f en montrant qu'elle était la composée de trois fonctions : la fonction f -1, la différentielle de f, et la « fonction inverse » qui à tout isomorphisme bicontinu de E associe son inverse. La fonction inverse est infiniment différentiable, f est de classe Cp et la réciproque de f est continue (car différentiable), on en déduit que la réciproque de f est de classe C1. De proche en proche, on vérifie que la réciproque de f est de classe Cp.
Notes et références
- F. Laudenbach, Calcul différentiel et intégral, éd. École Polytechnique, 2000 (ISBN 978-2-73020724-9), p. 61 et suivantes
- Voir à ce sujet l'article Topologie d'un espace vectoriel de dimension finie.
- V&F Bayart, Théorèmes d'inversion locale et globale sur le site bibmath.net
- Attention, en dimension infinie, un opérateur n'est pas nécessairement continu et sa continuité n'implique pas celle de sa réciproque.
Voir aussi
Articles connexes
Bibliographie
- J.-F. Ruaud, C. Deschamps, A. Warusfel, J'intègre. Cours de mathématiques de 2e année, éd. Dunod, (ISBN 978-2-10-005412-1)
- S. Lang, Analyse Réelle, InterEditions, Paris, 1977 (ISBN 978-2-72960059-4)
Catégories :- Analyse à plusieurs variables
- Topologie différentielle
- Théorème d'analyse
- Théorème de topologie
Wikimedia Foundation. 2010.