- Théorème du redressement
-
En mathématiques, le théorème du redressement d'un flot est un résultat de géométrie différentielle qui s'applique à un champ vectoriel. Il est l'un des théorèmes usuels en géométrie différentielle. Le théorème indique qu'un champ vectoriel suffisamment régulier se comporte localement comme un champ vectoriel constant.
Il est utilisé pour l'étude d'un système dynamique autonome, c'est-à-dire à une équation différentielle du type p' = X(p). Si X est localement lipschitzienne, alors il existe un fonction α(t, p) telle que les applications t → α(t, p) soient les solutions qui, en 0, valent p. L'application α est appelée flot, d'où le nom du théorème.
Ce résultat donne une information locale sur le flot. Il interdit même une certaine forme de chaos : localement un flot ne bifurque pas et est homéomorphe à une fonction affine. En dimension deux, si une orbite se trouve dans un compact contenu dans l'ensemble de définition de X, toute forme de chaos est impossible. Ce résultat, connu sous le nom de théorème de Poincaré-Bendixson, se démontre à l'aide de ce théorème.
Sommaire
Énoncés
Selon le contexte, le théorème prend une forme différente. Une première version se formalise de la manière suivante. Soit E un espace de Banach réel, Ω un ouvert de E, X une application de classe C1 de Ω dans E et p0 un point de Ω tel que X(p0) ne soit pas le vecteur nul.
-
- Théorème du redressement d'un champ de vecteurs dans un Banach : Si le champ de vecteurs X est de classe Ck, où k est un entier strictement positif ou l'infini, il existe un Ck difféomorphisme f d'un ouvert V dans un ouvert V' , tel que f(0) = p0 et f * X soit le champ constant égal à X(p0). Ici V' désigne un ouvert contenant p0 et inclus dans Ω et V un ouvert d'un espace de Banach isomorphe à E et contenant le vecteur nul[1].
Ce théorème possède un équivalent pour les variétés différentielles :
-
- Théorème du redressement d'un champ de vecteurs dans une variété : Soit M une variété de dimension n et de classe Ck, où k est un entier strictement positif ou l'infini, et X un champ de vecteurs contenant un point p0 de M. Si X(p) est un vecteur non nul, il existe une carte locale φ définie sur un ouvert V de Rn tel que l'image de V par cette carte soit un ouvert U de M contenant p0 et tel que l'image du champ de vecteur X par φ sur Rn vérifie[2] :

-
- Théorème des boites à flot : Soit U un ouvert contenant p0 et inclus dans Ω. Il existe S une section transverse à X en p0 inclus dans un hyperplan affine de direction H, un réel strictement positif σ et un difféomorphisme f défini sur un ouvert V, inclus dans U, et à valeurs dans Sx]-σ, σ[, qui envoie S dans Hx{0} et tel que le flot α(t, p) défini par X vérifie la propriété suivante[3] :
![\forall (t,p) \in ]-\sigma,\sigma[\times S\quad \frac {\partial {f\circ\alpha}}{\partial t}(t,p) = (0,1) \quad\text{et}\quad f\circ\alpha(0,p) = p](7/6075f3d60d03576495d814af81af8419.png)
Explications
Vocabulaire
Quelques symboles et termes nécessitent une explication. Le premier énoncé utilise le signe * dans une composition d'une fonction f et d'un champ de vecteurs X. Ici f est une application de V dans un ouvert inclus dans Ω. L'application qui à x associe X(f(x)) est bien définie sur X. Comme l'application f est un difféomorphisme, elle admet une différentielle au point x et cette différentielle est inversible. Ce qui assure que la définition suivante est bien cohérente :

Pour éviter une débauche de parenthèses, ici l'image d'un vecteur v par une application linéaire a est notée a.v.
L'équation différentielle x' = X(x) admet toujours une unique solution s vérifiant s(0) = p[Note 1]. La fonction qui à (t, p) associe α(t, p) définie comme la valeur de l'équation différentielle vérifiant la condition de Cauchy précédente est une fonction continue appelée flot. Si X est de classe Ck, alors le flot est aussi de classe Ck[Note 2].
Un hyperplan Ha affine, de direction H contenant p0 est dit transverse à X en p0 si la somme directe de H et de R.X(p0) est égal à E. Une section transverse à X est un ouvert S de H tel que l'hyperplan Ha soit transverse à X en tout point p de S. Si Ha est transverse à X en p0, une section transverse contenant p0 existe toujours. En effet, la composée de la projection sur R.X(p0) parallèlement à H du champ X est non nulle en p0 et est continue. Il existe un ouvert de p0 sur lequel cette projection est supérieur à un nombre réel strictement positif. L'intersection de ce voisinage et de Ha, est une section transverse à X contenant p0.
Interprétation
 Une boîte à flot permet de contrôler le flux au voisinage d'un point p0.
Une boîte à flot permet de contrôler le flux au voisinage d'un point p0.
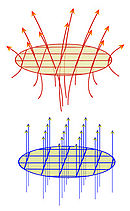
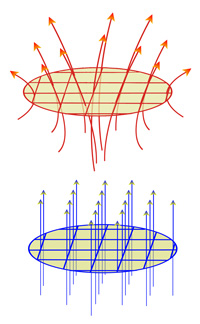
Ce théorème indique que localement et à un difféomorphisme près, on peut toujours considérer un champ de vecteurs comme constant. Le théorème redresse le champ à l'image de la figure de gauche. Un champ de classe C1 est à l'image de la figure rouge et jaune, il est possible de lui appliquer un difféomorphisme à travers la loi de composition * qui lui donne l'apparence du champ bleu et jaune au dessous.
Une autre forme indique la possibilité de construire une boîte à flot. Dans le monde redressé, la boîte à flot ressemble à une boîte de conserve contenant en son milieu le point p0. La base circulaire correspond à la section et le flot traverse la boite de sa base à son sommet à travers les trajectoires rectilignes uniformes et verticales. Ainsi, le flot ne rentre que par la base et ne sort que par le sommet, la paroi verticale est parallèle au flot et n'est pas traversée par lui. Dans le monde original, la boîte à flot est déformée par le difféomorphisme, mais garde cette propriété, la base reçoit le flot entrant, le sommet le flot sortant et la paroi reste parallèle au flot, à l'image de la figure de droite. Une telle boîte permet un contrôle du flux au voisinage de p0.
Un exemple d'usage d'une boîte à flot est la démonstration du théorème de Poincaré-Bendixson. Une telle boîte permet le contrôle de la trajectoire aux alentours d'un point bien choisi. A l'aide du théorème de Jordan, elle permet d'établir l'impossibilité d'une configuration chaotique si E est un plan, si l'équation différentielle est autonome dans une zone compacte de Ω invariante par le flot.
Démonstration
La démonstration se fonde essentiellement sur l'usage du théorème d'inversion locale et des propriétés d'un flot d'une équation différentielle. La démonstration se fait en deux temps. Tout d'abord, une fonction affine q est composée à X de manière à ce que le champ de vecteurs q *X ait pour différentielle l'identité au voisinage du vecteur p0. Comme le champ X est de classe Ck et q infiniment différentiable, le nouveau flot est de classe Ck-1 et le théorème d'inversion locale s'applique. Il existe un ouvert V contenant p0 tel que le flot soit inversible. Ce flot permet la construction de la fonction f recherchée[4].
La démonstration sur un espace vectoriel permet d'en déduire immédiatement celle associée à une variété[Note 3].
Construction de f
Soit λ1 la forme linéaire définie sur R.X(p0) qui à a.X(p0) associe a, λ un prolongement linéaire continu de λ1 sur E, qui existe d'après un corollaire du théorème de Hahn-Banach et H l'hyperplan noyau de λ, qui est fermé car λ est continue. Soit π, la projection de E sur H, qui à x associe π(x) = x - λ(x).X(p0). On définit la fonction q, de RxH dans E par :

On remarque que q est bien un difféomorphisme infiniment différentiable, car q est une application affine. On dispose des égalités :

On en déduit l'égalité, si Y désigne le champ de vecteurs q* X :

Soit αY le flot associé à l'équation différentielle (τ, x)' = Y((τ, x)). C'est l'application qui à (t, (τ, x)) associe αY(t, (τ, x)), l'image de t par la courbe intégrale s de condition initiale s(0) = (τ, x). Comme X est de classe Ck, Y l'est aussi (q est infiniment différentiable) et le flot αY est de classe Ck-1[Note 4]. On considère alors l'application Ψ, qui à (t, x)) associe Ψ(t, x)) = αY(t, (0, x)). Cette application est de classe Ck-1 et est définie sur un ouvert V1 contenant (0, 0).
Il est aisé de calculer les deux différentielles partielles :

On en déduit que la différentielle de Ψ est égal à l'identité au point (0, 0). Ce qui montre qu'il existe ouvert V contenant (0, 0) et inclus dans V1 et tel que Ψ soit un difféomorphisme sur V, d'après le théorème d'inversion locale. On définit f comme la fonction définie sur V, égale à qoΨ.
Propriété de la fonction f
Soit (t, x) un élément de V, Calculons la différentielle de DΨ(t,x) appliquée au vecteur (1, 0) :

On en déduit l'égalité, en appliquant l'inverse de DΨ(t,x) à l'égalité précédente :

Calculons l'inverse de la différentielle de f au point (t, x) :

Annexe
Notes
- Voir l'article Théorème de Cauchy-Lipschitz
- Voir l'article Flot (mathématiques)
- C'est ainsi que procède la référence : D. Leborgne Calcul différentiel et géométrie Puf (1982) p 234 (ISBN 2130374956)
- Voir l'article Flot (mathématiques)
Références
- Cet énoncé provient de : F. Paulin Topologie, analyse et calcul différentiel par l'École Normale Supérieure p 267
- D. Leborgne Calcul différentiel et géométrie Puf (1982) p 234 (ISBN 2130374956)
- On trouve cet énoncé dans : S. Cantat Théorème de Poincaré-Bendixson École Normale Supérieure de Lyon Le journal de maths des élèves, Volume 1 (1995), No. 3
- Cette méthode provient Schème E.97 p 264 du site : F. Paulin, Topologie, analyse et calcul différentiel de l'École Normale Supérieure (2008)
Liens externes
- (fr) F. Paulin Topologie, analyse et calcul différentiel par l'École Normale Supérieure
Bibliographie
- (en) M. W. Hirsch S. Smale Differential Equations, Dynamical Systems, and an Introduction to Chaos Academic Press (2002) (ISBN 0123497035)
- (fr) D. Leborgne Calcul différentiel et géométrie Puf (1982) (ISBN 2130374956)
Catégories :- Champ de vecteurs
- Théorème d'analyse
-
Wikimedia Foundation. 2010.