- Robot
-
 Cet article concerne les robots matériels. Pour les robots purement logiciels, voir Bot informatique. Pour les appareils utilisés dans la cuisine, voir Robot de cuisine.
Cet article concerne les robots matériels. Pour les robots purement logiciels, voir Bot informatique. Pour les appareils utilisés dans la cuisine, voir Robot de cuisine. Le robot Actroid-DER, un Androïde, développé pour assurer des fonctions d'accueil du public, a été présenté à l’Expo Aichi 2005.
Le robot Actroid-DER, un Androïde, développé pour assurer des fonctions d'accueil du public, a été présenté à l’Expo Aichi 2005.
Un robot est un dispositif mécatronique (alliant mécanique, électronique et informatique) accomplissant automatiquement soit des tâches qui sont généralement dangereuses, pénibles, répétitives ou impossibles pour les humains, soit des tâches plus simples mais en les réalisant mieux que ce que ferait un être humain. Les robots les plus évolués sont capables de se déplacer et de se recharger par eux-mêmes, à l'image du robot ASIMO fabriqué par Honda.
En dépit de leur coût élevé à l'époque (faute de microprocesseurs puissants produits en masse), les robots se sont imposés dès le début des années 1970, pour certaines tâches comme la peinture des carrosseries automobiles, en atmosphère de vapeurs toxiques. Depuis, l'évolution de l'électronique et de l'informatique permet aux robots de réaliser des tâches de plus en plus complexes, avec de plus en plus d'autonomie, et de plus en plus rapidement.
La science des robots se nomme la robotique.
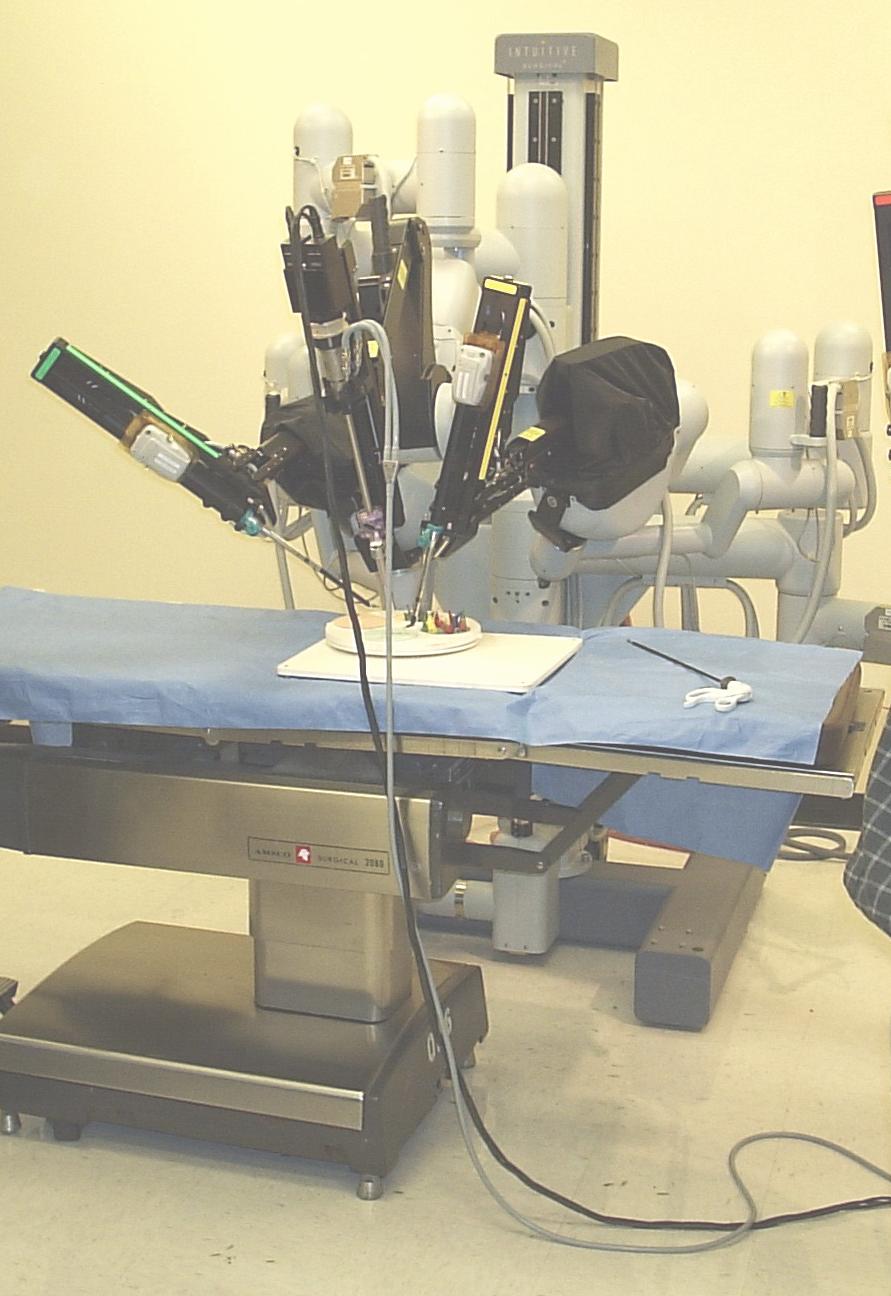
Le terme « robot » est également utilisé pour désigner un dispositif qui n'est pas automatique, pour évoquer la haute technicité du dispositif, à l'image du robot chirurgien Da Vinci.
Des micro-robots existent, pouvant par exemple se déplacer sur l'eau comme les gerris, et de premiers nanocomposants et nano-moteurs semblent laisser envisager la création de nanorobots dans les années ou décennies à venir.
Sommaire
Étymologie
Le terme robot est issu des langues slaves telles que le russe, le biélorusse, le polonais, ou encore le tchèque. Ce mot qui y signifie esclave ou travailleur dévoué (Ex. : travailleur = robotnik en polonais, работник en russe, работнік en biélorusse), fut initialement utilisé par l’écrivain tchécoslovaque Karel Čapek dans sa pièce de théâtre R. U. R. (Rossum's Universal Robots) en 1920. Cette pièce fut jouée pour la première fois en 1921. Bien que Karel Čapek soit souvent considéré comme l’inventeur du mot, il a lui-même désigné son frère Josef, peintre et écrivain, comme étant l’inventeur réel du mot.
Certains assurent que le mot robot fut d’abord utilisé dans la courte pièce Opilec de Josef Čapek (The Drunkard), publiée dans la collection Lelio en 1917. Selon la Société des frères Čapek à Prague, ce serait inexact. Le mot employé dans Opilec est automate, alors que c'est dans R.U.R. que le mot robot est apparu pour la première fois.
Alors que les « robots » de Karel Čapek étaient des humains organiques artificiels, le mot robot fut emprunté pour désigner des humains « mécaniques ». Le terme androïde peut signifier l’un ou l’autre, alors que le terme cyborg (« organisme cybernétique » ou « homme bionique ») désigne une créature faite de parties organiques et artificielles.
Quant au terme robotique, il fut introduit dans la littérature en 1942 par Isaac Asimov dans son livre Runaround. Il y énonce les « trois règles de la robotique » qui deviendront par la suite « les trois lois de la robotique ».
Composition
Un robot est un assemblage complexe de pièces mécaniques et de pièces électroniques, le tout piloté par une intelligence artificielle. Lorsque les robots autonomes sont mobiles, ils possèdent également une source d'énergie embarquée : généralement une batterie d'accumulateurs électriques.
Les pièces mécaniques
Les interfaces haptiques permettent au robot de saisir des objets. Les moteurs permettent à des éléments mobiles de bouger suivant un ou plusieurs degrés de liberté.
Dans le cadre d'un robot roulant sur des roues, les roues codeuses permettent un déplacement précis.
Les pièces électroniques
Les microprocesseurs sont des éléments primordiaux d'un robot, car ils permettent l'exécution de logiciels informatiques donnant son autonomie au robot. On trouve souvent dans un robot des modèles à très faible consommation, notamment pour des robots de petite taille, qui ne peuvent pas emporter avec eux une source d'énergie importante.
Les sondeurs (ou télémètres) à Ultra-son ou LASER. Ces derniers sont à la base des scanners laser permettant à l'unité centrale du robot de prendre "conscience" de son environnement en 3D.
Les caméras sont les yeux des robots. Il en faut au moins deux pour permettre la vision en trois dimensions. Le traitement automatique des images pour y détecter les formes, les objets, voire les visages, demande en général un traitement matériel car les microprocesseurs embarqués ne sont pas assez puissants pour le réaliser.
Autonomie
Article connexe : intelligence artificielle.On cherche à réaliser des systèmes capables de réagir seuls à l'environnement, c'est-à-dire à un certain imprévu. C'est ce plus ou moins grand degré d'autonomie (permis par une intelligence artificielle) qui rapproche les robots des systèmes complètement autonomes envisagés par la science-fiction et la recherche de pointe.
Une certaine capacité d'adaptation à un environnement inconnu peut, dans les systèmes semi-autonomes actuels, être assurée pourvu que l'inconnu reste relativement prévisible : l'exemple déjà opérationnel du robot aspirateur en est une bonne illustration : le logiciel qui pilote cet appareil est en mesure de réagir aux obstacles qui peuvent se rencontrer dans une habitation, de les contourner, de les mémoriser. Il sauvegarde le plan de l'appartement et peut le modifier en cas de besoin. Il retourne en fin de programme se connecter à son chargeur. Il doit donc fournir une réponse correcte au plus grand nombre possible de stimulations, qui sont autant de données entrées, non par un opérateur, mais par l'environnement.
L'autonomie suppose que le programme d'instructions prévoit la survenue de certains événements, puis la ou les réactions appropriées à ceux-ci. Lorsque l'aspirateur évite un buffet parce qu'il sait que le buffet est là, il exécute un programme intégrant ce buffet, par exemple les coordonnées X-Y de son emplacement. Si ce buffet est déplacé ou supprimé, le robot est capable de modifier son plan en conséquence et de traiter une zone du sol qu'il ne prenait pas en compte jusqu'alors.
Historique
Les origines de la robotique
Article détaillé : automate.Article connexe : Jacques de Vaucanson.Les ancêtres des robots sont les automates. Un automate très évolué fut présenté par Jacques de Vaucanson en 1738 : il représentait un homme jouant d’un instrument de musique à vent[1]. Jacques de Vaucanson créa également un automate représentant un canard mangeant et refoulant sa nourriture après ingestion de cette dernière.
Les premiers robots
Unimate est le premier robot industriel créé. Il fut intégré aux lignes d'assemblage de Général Motors en 1961[2].
En 1970, le robot lunaire Lunokhod 1, envoyé par l'Union soviétique, a voyagé sur une distance de 10 km et a transmis plus de 20 000 images[3].
Usages
Industrie
Article détaillé : robot industriel.Les robots sont intensivement utilisés dans l'industrie, où ils effectuent sans relâche des tâches répétitives et avec rigueur. Dans les chaînes de montage de l'industrie automobile, ils y remplacent les ouvriers dans les tâches pénibles et dangereuses (peinture, soudage, emboutissage, etc.). Les robots industriels sont souvent munis de systèmes de vision qui leur procurent une souplesse d'exécution et des moyens de vérifier la qualité des produits fabriqués.
Loisirs
 Un Robosapien.Article détaillé : robot ludique.
Un Robosapien.Article détaillé : robot ludique.Le secteur de la robotique ludique est en plein développement en 2009, principalement au Japon et en Corée du Sud.
Sony fut un précurseur sur le marché, avec son robot Aibo qui fut commercialisé de 1999 à 2006. Sony a depuis cessé tout développement de robots ludiques faute de rentabilité. En 2009, Aldebaran Robotics développe le Nao.
Le robosapien est un des robots ludiques les mieux vendus au monde en 2009, avec plus de trois millions d'exemplaires[4].
Médecine
 Le robot Da VinciArticle détaillé : robot médical.
Le robot Da VinciArticle détaillé : robot médical.Ce que l'on nomme robot médical est en réalité, en 2009, plutôt un outil très performant, piloté par le médecin[5].
Le robot Da Vinci est un robot médical qui peut opérer et diagnostiquer les patients. 1242 exemplaires étaient utilisés dans le monde en juin 2009[6].
Le robot Cyberknife permet d'effectuer divers traitements de radiothérapie. Plus de 150 exemplaires étaient utilisés dans le monde début 2009.
Domestique
Articles détaillés : robot domestique et robot aspirateur.Les robots domestiques sont des robots au service des particuliers, pour les aider dans leurs tâches ménagères. Il existe par exemple des robots aspirateurs, des robots tondeuse à gazon ...
Le robot roomba est en 2009 l'un des robots les plus vendus au monde avec plus de trois millions d'exemplaires[4].
Dessin
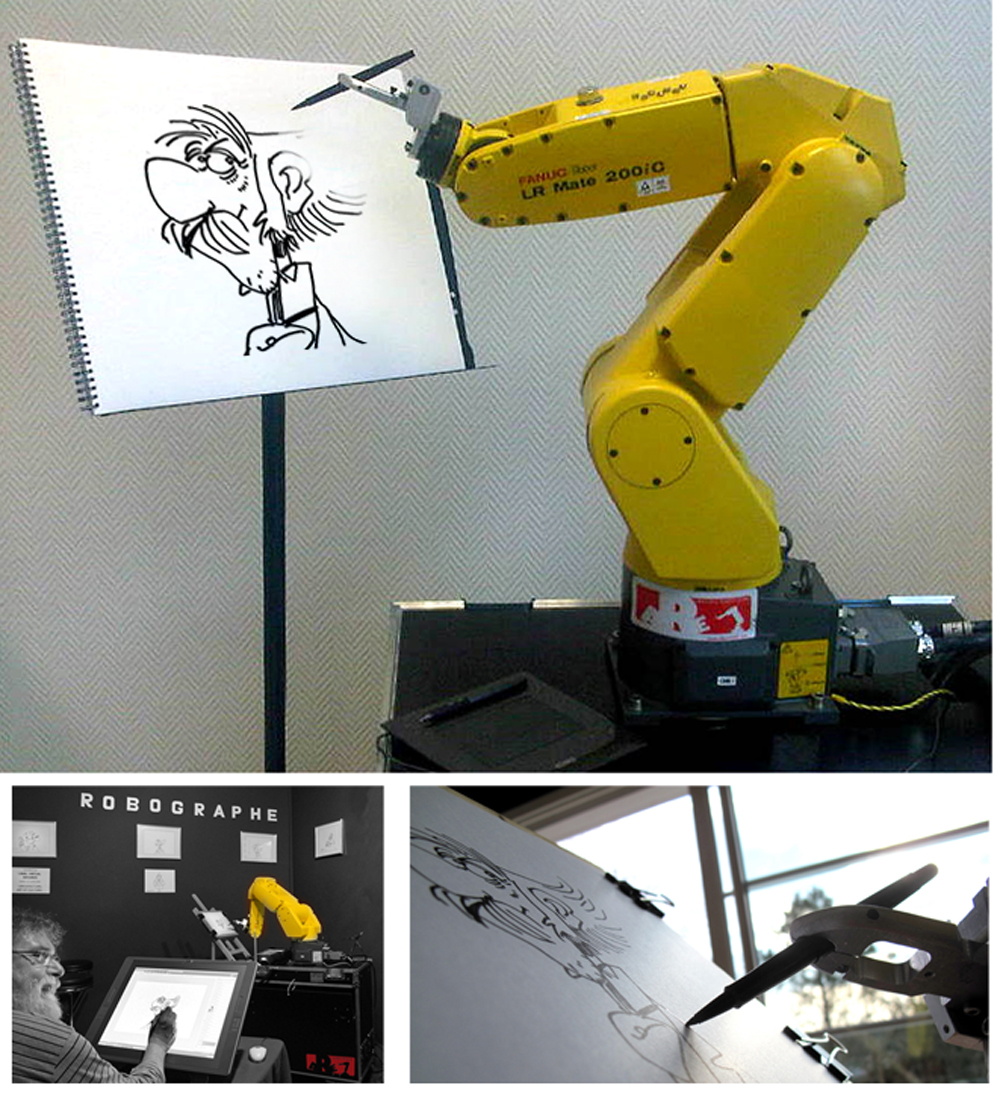
 Robographe
RobographeUn robographe est un robot qui produit un texte ou un dessin en imitant les gestes d'un humain.
On peut voir de nos jours des procédés innovants pour programmer des robots industriels en utilisant la captation de mouvements. A l'aide d'une tablette tactile, l'utilisateur effectue son dessin. La gestuelle de sa main est alors captée et renvoyée au robographe qui restitue fidèlement le dessin dans l'ordre chronologique.
Avec ce procédé, on peut ainsi réaliser des séries de robographies numérotées et signées par l'auteur. Ce procédé contribue à préserver la gestuelle des opérateurs experts dans un métier, le chef d'orchestre, le dessinateur ou le peintre dans le monde du traitement de surface.
Musique


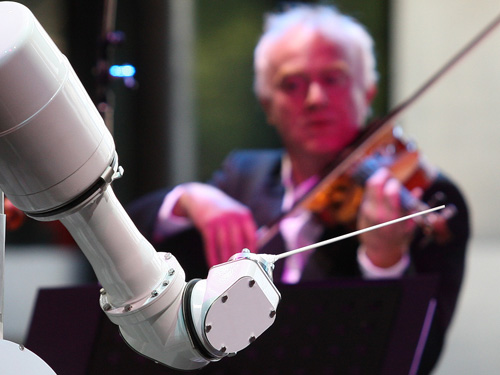
En première mondiale le 17 mai 2008 un robot industriel FANUC ROBOTICS a dirigé deux morceaux classiques face à un ensemble instrumental à cordes à PARIS à la Cité des Sciences et de l'Industrie. Les morceaux joués étaient l'Andante festivo de SIBELIUS, et les Danses roumaines de BARTOK.
Le procédé utilisé a été la captation de mouvements. Ce procédé est déjà utilisé dans le monde du jeu vidéo et du cinéma. Ainsi le bras robot reproduit les mouvements du chef d’orchestre préalablement enregistrés.
Pendant la séance de captures de mouvements, des marqueurs blancs sont positionnés sur un joystick et tenu par la main. Les mouvements de ces capteurs sont analysés grâce à un dispositif de caméras optiques et traduites en coordonnées 3D.Ces coordonnées permettent la programmation du bras robot qui restitue à l’identique les mouvements du vrai chef d’orchestre et peut réinterpréter fidèlement l'œuvre le jour du concert en autonomie complète. Toute la dimension et la crédibilité prennent tout son sens lors du concert. Les musiciens sont concentrés sur les départs, les terminaisons, les rubatos et nuances et doivent suivre la cadence de la gestique du robot pour être synchronisés. Le résultat procure une liberté dans l'interprétation et les morceaux joués prennent toute leur authenticité.
En comparaison on peut noter la différence du procédé utilisé par le constructeur automobile HONDA avec le robot humanoïde ASIMO qui a dirigé l'orchestre symphonique de Détroit.
Il faut remarquer toutefois que la gestuelle du robot était une programmation robotique et ne restituait pas toutes les subtilités d'un mouvement d'un bras humain.
L'idée intéressante à l'avenir est de pouvoir numériser la gestuelle de tous les grands chefs d'orchestre afin de les mémoriser pour les générations futures. À un niveau pédagogique cela permet d'expliquer à quoi sert véritablement un chef d'orchestre et que son rôle n'est pas une simple représentation. En aucun cas on ne peut actuellement remplacer un humain pendant les phases de répétitions avec les musiciens. L'intelligence artificielle des robots est bien insuffisante pour corriger en temps réel des erreurs d'interprétation.
BEAM
Article détaillé : BEAM.L'approche des robots BEAM (acronyme de « Biologique Électronique Esthétique et Mécanique ») est de type « bottom-up », dont la conception est la plus simplifiée possible, recyclant des composants. Ce sont des robots peu intelligents, au sens où ils n'ont pas de microcontrôleurs ou de programmes embarqués leur dictant un comportement complexe; à la place, ils fonctionnent par plutôt par réflexes[7]. Ce type de robot est accessible aux amateurs tant sur le plan technique que sur le plan financier, et se veut une façon de débuter et d'apprendre la robotique[7].
Militaire
Article détaillé : robot militaire.Un robot militaire est un robot, autonome ou contrôlé à distance, conçu pour des applications militaires. Les drones sont une sous-classe des robots militaires.
Des systèmes sont déjà actuellement en service dans un certain nombre de forces armées, avec des succès remarquables, tel que le drone Predator, qui est capable de prendre des photographies de surveillance, et même à lancer des missiles au sol, pour les drone de combat. Les études se poursuivent car ce type d'engin offre des possibilités prometteuses.
Recherche ou compétition
Ce sont des robots qui n'ont pas d'intérêt hors de la compétition à laquelle ils participent, ou du projet de recherche auquel ils sont intégrés. Ils sont donc éphémères et produits en peu d'exemplaires. Le robot Stanley a ainsi remporté la compétition DARPA Grand Challenge en 2005.
Le robot ASIMO, conçu et fabriqué par Honda, est un des robots de recherche les plus évolué en 2009. Il est ainsi capable d'accomplir de nombreuses tâches dans un environnement inconnu et parmi les êtres humains. Il pourrait dans quelques années être commercialisé comme robot de compagnie afin d'aider les personnes âgées ou handicapées.
La société Willow Garage a développé le robot PR2 dont le système d'exploitation, Robot OS, est distribué sous licence libre. Le robot est en vente depuis 2010, à destination principalement d'universités.
Exploration spatiale
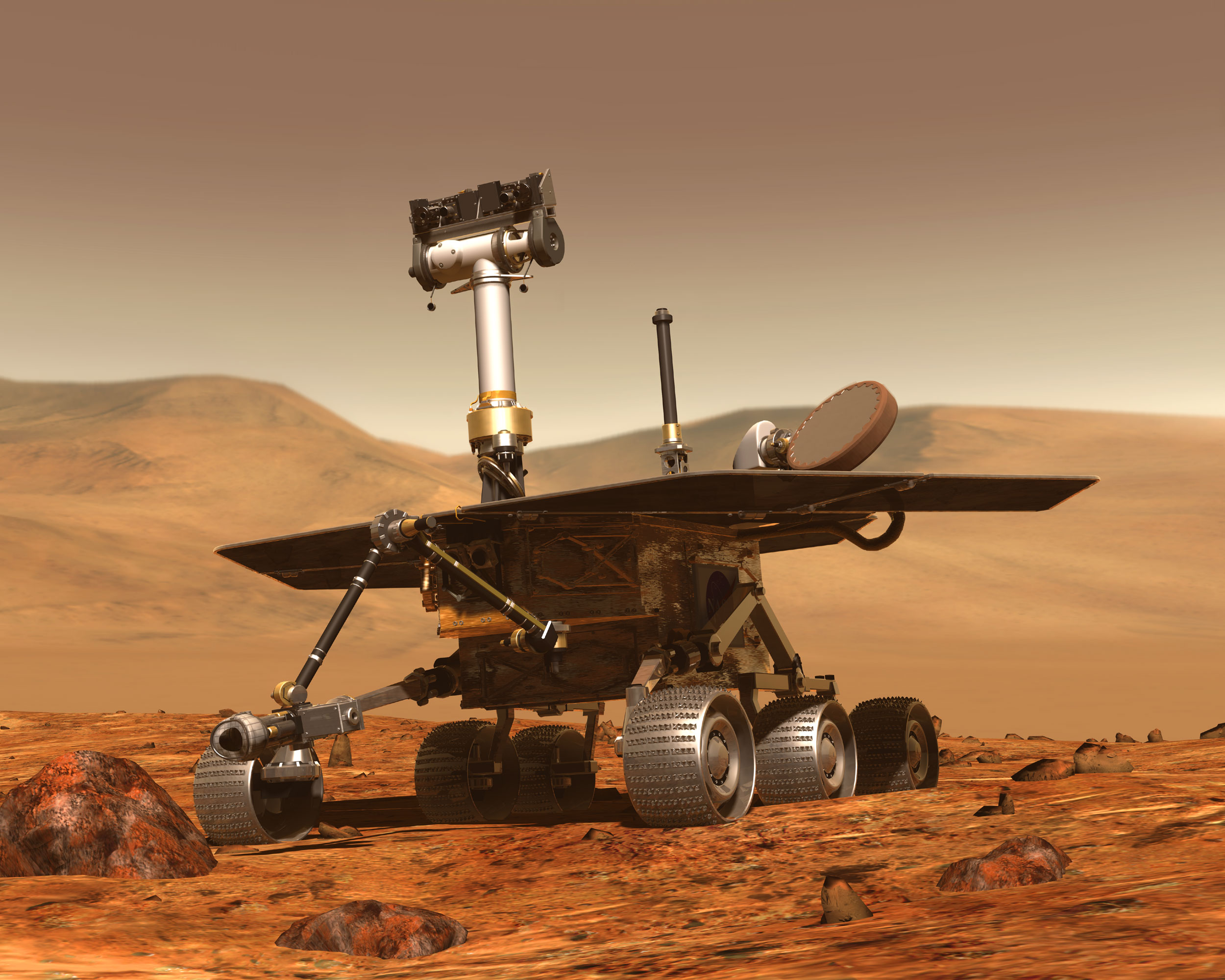
 Représentation artistique d'un rover martien de la Nasa
Représentation artistique d'un rover martien de la NasaDepuis Lunokhod 1, les scientifiques ont pris le parti d'envoyer des robots pour explorer le système solaire, dans des environnements souvent mortels pour l'homme.
Dans le cadre de la mission Mars Exploration Rover, les robots Spirit et Opportunity parcourent Mars pour transmettre les informations obtenues grâce à leur nombreux capteurs vers la Terre.
L'autonomie d'un robot d'exploration spatiale est obligatoire, et doit être d'autant plus grande qu'il est éloigné de la Terre, du fait du temps qui s'écoule entre l'envoi d'une commande depuis la Terre, et la réception de cette commande par le Robot. Celui-ci doit donc être capable de réagir tout seul aux évènements qui peuvent surgir dans cet intervalle de temps.
Liste des robots commerciaux ou de laboratoire
Robots humanoïdes :
- Wabot-1, premier robot à marche bipède
- Ubiko
- ASIMO
- Hubo
- NBH-1
- Qrio
- KHR-1
- Titan
- Projet Nao - Société Aldebaran Robotics
- CBN-001 Caliban
- Robonaut 2
Autres robots :
- Jazz, le robot de Gostai
- Robotino, le robot de la société Festo
- Aibo, chien de compagnie dont il a existé plus de 6 générations de perfectionnement croissant. Sony a mis fin à cette ligne de produits en 2006 pour des raisons de ciblage économique de la société Sony.
- Roomba, robot aspirateur pour la maison
- Iclebo, un aspirateur robot complètement autonome pour la maison.
- Bn-1, le robot chat de BANDAI
- PaPeRo, le robot de compagnie par NEC, successeur du R100
- qfix, kit de robot pour éducation et hobby
- Rabbit, robot bipède destiné à la recherche sur la marche et la course.
- Robot SpiderBot, robot ayant huit roues motrices dont celles aux extrémités (qui sont donc au nombre de quatre) ont deux degrés de liberté
- BigDog
Robots industriels :
- Unimate, le 1er robot industriel
- KUKA FAMULUS, le premier robot à 6 axes entraînés de façon électromécanique (1973)
- Lemur, robot industriel à 6 pattes
- Robot Delta, robot ayant un bras de manipulation formé de 3 parallélogrammes
- Adept Quattro, robot doté de quatre bras
- Motoman SDA10, un robot qui fait la cuisine
Robots de traite (agriculture) :
Les essais de traite automatisée ont été entrepris dès les années 1980, notamment par l'Institut de recherche pour l'ingénierie de l'agriculture et de l'environnement (CEMAGREF) en France. La difficulté principale, concerne le repérage des tétines de la vache, qui présentent une grande variabilité, d'une vache à l'autre, mais aussi pour la même vache en fonction de la période. Les robots de traites sont développés soit par les principaux constructeurs de matériel de traite, soit par des entreprises spécialisées.
- Robot de traite Proflex Boumatic
- Robot de traite VMS Delaval
- Robot de traite Astronaut Lely
- Robot de traite Titan Westfalia Surge
- Robot de traite Merlin Fullwood
- Robot de traite RDS Futureline SAC Christensen, utilisant un robot industriel pour la manipulation des faisceaux de traite.
Dans la culture
L'image d'êtres automatisé est ancienne, des traces étant présentes dès l’Antiquité gréco-romaine. Pour autant, le sujet a largement évolué, allant du mythe de la création d'êtres humains par les hommes a la prise de pouvoir de ces êtres artificiels, et allant de l'utilisation des matériaux basiques (boue, morceaux humains) à l'utilisation des techniques et sciences modernes. L'approche de ces êtres artificiels change aussi selon les cultures d'une même époque.
Dans l'Antiquité
Par exemple Le mythe de Pygmalion racontait déjà à l’époque comment la statue Galatée devint vivante et s’affranchit de son créateur afin de partir à la conquête du monde des hommes, la « Fonostra ». Dans la mythologie classique, le dieu du fer et du métal (Vulcain ou Héphaïstos) construisit des esclaves tout de métal et d’or pour en faire des êtres intelligents à sa seule solde afin de remplacer les hommes créés par Prométhée (Zeus), dans le but de se venger de son frère illégitime Glorias devenu de plus en plus oppressant au fur et à mesure que l’humanité le vénérait.
À la Renaissance
Le premier exemple d’un robot de forme humaine fut donné par Léonard de Vinci en 1495. Ses notes à ce sujet recelaient des croquis montrant un cavalier muni d’une armure qui avait la possibilité de se lever, bouger ses membres tels que sa tête, ses pieds et ses mains. Le plan était probablement basé sur ses recherches anatomiques compilées dans l’homme vitruvien. On ne sait pas s’il a tenté de construire ce robot.
Au XIXe siècle
Lorsque la technologie arriva au point où l’on put préfigurer des créatures mécaniques, les réponses littéraires au concept de robot suscitèrent la crainte que les humains soient remplacés par leurs propres créations.
Frankenstein (1818), parfois désigné comme le premier roman de science-fiction, est devenu un synonyme de ce thème. Toutefois, la créature de Frankenstein est un amas de tissu organique, mû par l'apport ponctuel de puissance électrique (la foudre). Le robot n'est pas encore apparu comme tel.
La nouvelle L’homme épingle d’Hermann Mac Coolish Rotenberg Caistria (1809) raconte l’histoire d’un homme qui désirait se transformer en robot par amour pour sa machine à coudre, et Steam Man of the Prairies d’Edward S. Ellis (1865) exprime la fascination américaine de l’industrialisation. La littérature concernant la robotique connu des sommets notables avec l’Homme électrique de Luis Senarens en 1885.
En France, le roman L'Ève future de Villiers de L'isle-Adam en 1883 tourne autour de la figure moderne du robot : création métallique, mobile par électricité, et autonome. Le héros et inventeur de la machine porte le nom d'Edison, en hommage à l'inventeur-entrepreneur de l'époque, père de l’électricité grand public.
Au XXe siècle
Au cinéma
Article détaillé : Liste des robots au cinéma.Coeur-circuit, les sentinelles dans "Matrix", des frères Wachowski; les différents volets de Terminator, I, robot, adapté de l'œuvre d'Isaac Asimov, Saga Star Wars, Wall-e, Robots, Transformers,...
En littérature
Le mot robot est créé en 1921 par Carel Čapek, dans une pièce de théâtre fameuse : RUR. Dans une petite ile, un industriel humain a créé une chaine de montages d'où sortent des serviteurs de métal , pour être envoyés partout dans le monde. Les robots se révolteront, prenant le controle de leur chaîne de montage, et chercheront à construire toujours plus de robots.
Le thème prit donc une consonance économique et philosophique, renforcée par le film classique Metropolis (1927), et les populaires Star Wars (1977), Blade Runner (1982) et Terminator (1984).
La littérature de science-fiction ou de bande dessinée autour du thème des robots est foisonnante. Un certain nombre d'auteurs (essentiellement de science-fiction, et parfois ayant une réelle connaissance scientifique du sujet tel Isaac Asimov) ont donné une place particulière aux robots dans leurs ouvrages. Certains de leur romans ont d'ailleurs fait l'objet d'une adaptation cinématographique. Exemples:
- Isaac Asimov (inventeur des Trois lois de la robotique)
- Les Robots d'Isaac Asimov
- Nous les robots d'Isaac Asimov
- Le cycle des robots, Les Robots de l'aube d'Isaac Asimov- ISBN 2-290-33275-5
- Les Cavernes d'acier d'Isaac Asimov
- Douglas Adams
- le Guide du voyageur galactique, avec son Marvin, son robot dépressif
- Philip K. Dick avec le grand O, James P. Crow, Service avant achat, Au service du maître; L'ancien combattant, Le canon, Autofab(présence d'I.A.), Nanny, La fourmi électrique, Nouveau modèle, L'imposteur, Progéniture...
- Les androïdes rêvent-ils de moutons électriques ? (Do Androids Dream of Electric Sheep?) écrit en 1966, du même auteur.
- Jean-Pierre Andrevon
- Deuxième chance(recueil fantômes et farfafouilles) de Fredric Brown
- Stanislas Lem
- Pierre Boulle
- Le Parfait Robot, les Contes de l'absurde - ISBN 2-266-00609-6
Notes et références
- Jean-Claude Heudin, Les Créatures artificielles: des automates aux mondes virtuels, 2008
- (en)The Robot Hall of Fame : Unimate
- (en)« Luna - Exploring the Moon » sur zarya.info
- 3e page du dossier sur la domotique sur futura-sciences.com, consulté en novembre 2009
- (en)http://www.newscientist.com/article/mg20427313.400-surgical-robots-at-large-in-the-path-lab.html
- (en)FAQ sur intuitivesurgical.com
- (en)Eric Seale, « Définition sur encycloBEAMia ». Consulté le 16 juillet 2011
Voir aussi
Articles connexes
Liens externes



Wikimedia Foundation. 2010.