- Clothoïde
-
 Pour les articles homonymes, voir Fresnel.
Pour les articles homonymes, voir Fresnel.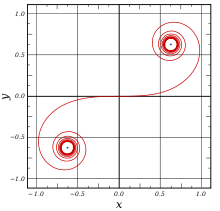 Représentation partielle de la clothoïde unitaire centrée, montrée ici avec un nombre réduit de spires et les points asymptotiques. La courbe complète s'approche indéfiniment des points marqués au centre des spires, mais après un parcours de longueur infinie qu'il n'est pas possible de représenter : ces spires quasi-circulaires sont de plus en plus serrées.
Représentation partielle de la clothoïde unitaire centrée, montrée ici avec un nombre réduit de spires et les points asymptotiques. La courbe complète s'approche indéfiniment des points marqués au centre des spires, mais après un parcours de longueur infinie qu'il n'est pas possible de représenter : ces spires quasi-circulaires sont de plus en plus serrées.
La clothoïde est une courbe transcendante plane dont la courbure est proportionnelle à l'abscisse curviligne.
Elle est également appelée spirale de Cornu, en référence à Alfred Cornu, le physicien français qui l'a redécouverte. Plus rarement, elle peut apparaître sous le nom de radioïde aux arcs, spirale d'Euler (Leonhard Euler en est le véritable codécouvreur et qui l'a complètement formulée suite aux travaux de Jacques Bernoulli sur les déformations d'une lamelle élastique), mais encore spirale de Fresnel (qui l'a redécouverte plus tard dans ses travaux sur les franges de diffraction de la lumière au travers d'une fente rectiligne, avant que sa formule soit finalement identifiée comme équivalente à la formule d'Euler), ou encore plus récemment spirale de transition d'un rail de Talbot (suite aux travaux cherchant à réduire les effets d'une montée brutale de la force centrifuge dans l'amorce d'un virage), une dénomination qui recouvre aussi son utilisation dans la conception des raccordements de virages routiers.
Le nom clothoïde est en fait postérieur de plus d'un siècle à la découverte de Bernoulli et Euler, et selon l'usage normal des attributions scientifiques, cette courbe devrait préférablement être appelée spirale d'Euler, ou spirale eulérienne. Toutefois le néologisme s'est imposé par son unicité et le fait que Bernoulli et Euler ont également étudié d'autres types de spirales (telle que la spirale logarithmique).
Sommaire
Étymologies, dénominations et historique de la découverte de la courbe
Le mot clothoïde vient du grec klothein : filer (la laine), la forme de la courbe rappelant celle du fil qui s'enroule autour du métier à tisser. La même racine apparaît dans le nom de Clotho, celle des trois Parques qui tient le fil des destinées humaines. Cette étymologie en apparence ancienne, n'a toutefois aucun rapport avec la découverte réelle de la courbe et sa formulation complète, il n'est utilisé que par analogie. En aucun cas la Grèce ancienne n'avait réussi à formuler cette courbe, et pendant plusieurs millénaires, on l'a confondue à tort avec une parabole ou un arc elliptique.
Dans les faits, la spirale eulérienne a été d'abord décrite en 1694 par Jacques (ou Jacob) Bernoulli (1654–1705)[1], comme devant être la courbe permettant de donner la forme d'une lamelle élastique fixée horizontalement sur un mur vertical, et soumise à la contrainte d'un poids exerçant une force verticale à son autre extrémité, étant entendu que la lamelle est supposée ne pas subir d'élongation autre que la déformation élastique de son épaisseur (avec une compression horizontale sur sa face inférieure qui compense la dilatation horizontale subie sur la face supérieure, sans réduction notable de l'épaisseur pour compenser l'incompressibilité partielle de la face inférieure, afin de conserver la quantité de matière de la lamelle). Par la suite, Bernouilli pose une conjecture sur l'équation de cette courbe, sur une base finalement empirique devant répondre à l'expression des contraintes, sans pouvoir la démontrer (et d'ailleurs il commence par se tromper dans sa conjecture initiale, que cette courbe devrait être un arc de parabole, jusqu'à ce qu'il lise les travaux d'Euler à qui il parle du problème).
Plus tard, Leonhard Euler, étudiant les travaux de Bernouilli, parvient à caractériser la courbe en 1744 (la même année que la publication posthume des œuvres complètes de Jacob Bernouilli) pour en donner une équation posée selon la simple théorie des moments, en prenant un biais : celui où la lamelle à son état de repos (posée à plat) a la forme de la spirale de Bernouilli, mais qui fixée au mur avec la contrainte du poids à son extrémité de sorte , la déforme verticalement vers le bas de façon élastique pour la rendre horizontale ; dans ce cas, le moment [de force] le long de la lamelle élastique [rendue droite sous l'action du poids] est alors simplement le produit de la force du poids de contrainte par la distance s entre l'extrémité de la lamelle et le second point de contrainte la fixation au mur vertical). Euler établit alors la « quadrature » de la courbe de Bernouilli (c'est-à-dire son expression sous la forme de coordonnées cartésiennes exprimées selon le paramètre s, et démontre que cette expression est équivalente à la formulation donnée (de façon empirique) de Bernouilli.
Euler parvient même à donner une formulation de l'équation (une intégrale rectiligne selon s pour chaque coordonnée) sous forme d'une série polynomiale, ce qui permet enfin d'en calculer des approximations numériques. Par la suite Euler établit la forme complète de cette courbe, et en 1781, il découvre la valeur des intégrales, déjà reformulée comme la limite d'une série polynomiale, pour la position des deux « centres » de la spirale. Bien que la courbe de Bernouilli et la spirale d'Euler aient été établies dans les deux cas sur l'étude de la déformation de fines lames élastiques inextensibles en longueur, ces deux courbes ne seront finalement considérées comme équivalentes que lorsqu'Euler lui-même établira que les deux problèmes sont liés, en formulant une équation générale de la déformation subie par la lamelle, indépendamment de la forme initiale au repos (sans contrainte) de la lamelle.
Plus tard, vers 1848, Augustin Fresnel, en étudiant la forme que doivent avoir les franges de diffraction d'une source de lumière monochromatique au travers d'une fente rectiligne, afin de démontrer expérimentalement la théorie de la nature ondulatoire de la lumière. En se basant sur les équations de propagation des fronts d'onde formés comme si le segment joignant les deux côtés de la fente (réduite à sa projection dans un plan orthogonal à cette fente et contenant l'axe de l'onde rectiligne incidente), il établit la formulation des équations cartésiennes de l'intensité de ce front d'onde, et obtient deux intégrales, qu'il résout aussi pour obtenir une solution pour obtenir la double spirale antisymétique, dont il calcule la position des centres. On doit le nom « spirale de Cornu » au fait que Alfred Cornu parviendra à donner la forme complète et dessiner la courbe de Fresnel avec une excellente approximation numérique dont il estime correctement l'erreur maximale d'approximation. L'équivalence des équations de Fresnel (et de la spirale de Cornu) avec les équations et la spirale d'Euler ne sera relevée que bien plus tard, et Fresnel reconnaîtra la paternité de la découverte d'Euler. Henri Poincaré, au décès de Cornu en 1902, rendra pourtant célèbre l'expression « spirale de Cornu » (en parlant de la forme des franges de diffraction de Fresnel) pour désinger cette courbe.
Et si ces deux noms ne sufffisaient pas, il faudra encore l'intervention d'un troisième mathématicien, Ernesto Cesàro, qui suggérera le nom « clothoïde » en référence à la description mythologique de Clotho (Kλωθω´ en grec), la plus jeune des trois Moires dans la mythologie grecque, qui est la fileuse qui tisse le fil infini du temps et de la vie qui, de façon infinie, se déroule de sa source pour venir s'enrouler de l'autre côté autour d'un point final jamais atteint mais sans cesse approché, puisque la courbe spirale se déroule et s'enroule en une quantité infinie de spires autour de deux rouets.
Et si trois noms ne suffisaient pas encore, il faudra à nouveau que la spirale soit caractérisée plus tard par les travaux de l'ingénieur Arthur Talbot qui résoudra mathématiquement en 1890 les équations de contraintes données pour satisfaire la forme que doivent avoir les rails d'une ligne de chemin de fer à l'amorce d'une courbe après une ligne droite, afin de minimiser les coups d'accélération centrifuge ressentis par les passagers, qui mettaient aussi à mal certaines marchandises transportées, mais aussi provoquaient une usure prématurée des roulements et des rails, voire étaient à l'origine de certains déraillements, mais obligeaient aussi à maintenir une vitesse faible du train, à augmenter l'adhérence du système de roulage, et donc augmentait aussi l'énergie consommée et donc le coût, l'efficacité et les performances de ce mode de transport. Talbot faisait donc suite aux recherches d'optimisation de la forme des rails déjà entreprises par l'ingénieur William Gravat, en 1848, ce dernier mentionnant aussi que la forme de cette courbe doit aussi influencer l'inclinaison verticale à donner à l'horizontale entre les deux rails, pour contrer la force centrifuge et maintenir la stabilité du roulement, mais aussi parce que cette inclinaison ne peut pas varier brutalement de l'horizontale parfaite (dans une section de rail rectiligne) à l'inclinaison maximale que doivent avoir les rails lorsqu'ils atteignent le rayon minimal de courbure (qui est aussi le maximum d'accélération supporté par les porteurs de charge, y compris les planchers des voitures et plateaux de transport).
Ansi Talbot résoudra le problème d'ingéniérie pour finalement donner en solution exactement la même courbe que celle établie par Bernouilli/Euler (dans l'étude des déformations de lames élastiques), et par Fresnel/Cornu (dans l'étude des formes des franges d'interférence de la lumière). C'est à lui donc qu'on doit aussi le nom « spirale de Talbot », bien que là encore on oublie la paternité de la découverte et de la spécification complète par Euler.
Curieusement, c'est le troisième nom de « clothoïde » qui est aujourd'hui le plus connu, bien que ce nom oublie complètement la paternité des travaux de Fresnel avec la contribution somme toute plus modeste de Cornu (à qui à doit respectivement les troisième et deuxième noms les plus utilisés pour désigner la courbe), et même avant eux les travaux d'Euler basés sur la formulation partielle de Bernouilli. L'expression « spirale d'Euler » ou « spirale eulérienne » est finalement la moins utilisée alors qu'elle est scientifiquement la plus juste (d'autre part c'est encore Euler qui a énuméré la plupart des propriétés de cette courbe, et l'a inscrite dans une famille plus large qu'il a beaucoup étudiée, celle des « splines » de deuxième ordre (ou d'ordre supérieur) respectant un nombre minimum de degrés de continuité ou de dérivabilité).
La spirale d'Euler, comme on devrait donc l'appeler (au lieu de « clothoïde », qui n'en fait qu'une description somme toute très imagée et pas nécessairement exacte car caractérisant une famille plus large de courbes pouvant avoir cette apparence), est aujourd'hui remarquable car elle apparaît comme solution à nombre de problèmes physiques bien réels (par exemple la forme que doit avoir la surface séparant deux phases de matière fluide, dans un solide cylindrique exerçant des forces d'attractions ou de répulsion avec les molécules de fluides de nature distincte ou dans une phase liquide/gaz distincte). Et Euler fournissait déjà, 3 siècles avant que les problèmes actuels soient posés, non seulement la solution à ces problèmes posés sous forme d'équations différentielles ou d'intégrales, mais aussi démontrait toute une série de théorèmes sur les propriétés de ces courbes, des théorèmes qui permettent aussi des vérification expérimentales devant démontrer que les problèmes physiques modéliser par les équations différentielles sont correctement caractérisés de façon suffisante pour parvenir à au moins une solution, mais aussi permettre de choisir un infinité de solutions selon d'autres critères.
Aujourd'hui, la spirale d'Euler connait un regain d'intérêt dans le tracé de splines aussi bien esthétiques à l’œil que devant être simples à réaliser de façon mécanique, stables numériquement dans leurs approximations numériques, et devant respecter aussi toute une série de propriété très utiles dans le design de telles courbes telle que :
- leur extensibilité – une propriété partagée par les courbes de Bézier, bien que ces dernières (de degré quelconque) ne soient pas conservées lors de transformations du système de coordonnées, hors du cas des simples translations, rotations ou homothéties, notamment dans les transformations affines du plan comme les déformations non isométriques et d'autres projections non linéaires comme la perspective) — c'est-à-dire la possibilité d'interpoler de façon exacte un point situé sur la courbe et de l'ajouter à la définition des points points de contrôle de la spline, sans en altérer la forme ;
- leur localité – une possibilité offerte par les splines d'interpolation d'autres courbes, constituées d'une série d'arcs de courbes co-tangeants aux points de contrôle de la spline, qui permet de limiter l'effet des points de contrôle de chaque arc à un une région limité de la courbe sans trop la déformer.
Ainsi les arcs de spirale eulérienne (ou arcs de « clothoïdes ») sont maintenant utiles dans la conception esthétique de glyphes dans les polices de caractères et dans la production de glyphes dérivés (par exemple par une graisse différente ou un effet d'italique), car elles permettent aussi de modéliser les contours des glyphes tracés par des têtes de crayons ou pinceaux non strictement circulaires (par exemple pour produire une graisse variable le long du contour, selon sa direction ou son sens de tracé). La modélisation avec de tels arcs permet aussi de réduire considérablement le nombre de points de contrôle nécessaires (par exemple 6 ou 7 points pour un seul spline constitué d'arcs de spirale eulérienne peuvent suffire à modéliser de façon très esthétique le tracé d'une lettre D majuscule dans un style cursif manuscrit, ou bien autant de points pour produire une lettre latine S majuscule ou minuscule, et 5 points seulement pour définir la forme d'une lettre U dans un style sans empattement mais éventuellement italique, là où la modélisation avec des courbes de Bézier quadratiques – ou même cubiques – demande un nombre un nombre bien plus élevé de points de contrôle à positionner de façon empirique, sans parvenir à un même degré d'esthétisme ni de continuité et de dérivabilité). De plus la modélisation à l’aide de d'arcs de spirale eulérienne permet aussi de prendre en compte les déformations visuellement esthétiques nécessaires pour garder la lisibilité et le contraste des glyphes lors de changements de taille de corps, par un déplacement léger des points de contrôle devant toutefois continuer à respecter les contraintes de continuité, de dérivabilité (particulièrement aux points d'inflexion des glyphes, là où la courbure est minimale, c'est-à-dire le rayon de courbure très grand par rapport à la taille du glyphe, des points auxquels la vision humaine est extrêmement sensible à une très faible variation de cette courbure).
Définition mathématique
La courbe peut être définie paramétriquement par les équations suivantes :
Sans perdre de la généralité de cette définition, on peut aussi supprimer la constante libre a de cette expression (une constante en général conservée dans les expressions de la courbe), en définissant comme clothoïde toute courbe qui suit une telle équation dans un quelconque repère orthonormé du plan, par une transformation isométrique ou une homothétie : le paramètre a correspond uniquement au facteur d'une homothétie, mais les autres transformations isométriques du plan (rotation et translation) se ramènent à un changement d'orientation ou du centre d'un repère orthonormé (mais cette généralisation ne concerne pas toutes les transformations affines du plan, qui influent notablement sur les métriques de la courbe et ne conservent pas nécessairement les angles relatifs, ni les distances relatives, ni non plus les aires relatives soutendues entre les cordes et les arcs, et encore moins les rayons de courbure relatifs, même si elles conservent les tangentes et les points d'inflexion).
On voit que l’intégrale de Fresnel entre en jeu dans son calcul, car ces équations, où les coordonnées ont été séparées, sont équivalentes à une équation unique, formulée cette fois dans le plan complexe :
Toutefois Euler l’a calculée bien avant Fresnel, sans même faire appel à cette propriété. Mais dans les deux cas, le choix du paramètre s n'est pas quelconque, puisque celui-ci mesure une distance effective dans le plan, le long de la courbe, et non un simple paramètre libre destiné à simplifier l'expression paramétrique de celle-ci.
On peut également la définir par une équation intrinsèque (équation de Bernoulli, résolue par Euler avec une intégrale curviligne) :
où
 représente le rayon de courbure local et
représente le rayon de courbure local et  l’abscisse curviligne. On peut aussi l’écrire préférablement :
l’abscisse curviligne. On peut aussi l’écrire préférablement :où
 représente la courbure locale (signée dans le repère de Frenet), avec l'avantage que cette équation évite la singularité du point d'inflexion au centre de symétrie de la spirale (où le rayon de courbure est localement indéfini, tendant simultanément vers plus et moins l'infini, selon le côté d'approche de ce point d'inflexion, tandis que la courbature est nulle sur ce point d'inflexion), la courbure ne tendant vers l'infini qu’à l‘approche des deux points asymptotiques autour desquels s'enroule la spirale.
représente la courbure locale (signée dans le repère de Frenet), avec l'avantage que cette équation évite la singularité du point d'inflexion au centre de symétrie de la spirale (où le rayon de courbure est localement indéfini, tendant simultanément vers plus et moins l'infini, selon le côté d'approche de ce point d'inflexion, tandis que la courbature est nulle sur ce point d'inflexion), la courbure ne tendant vers l'infini qu’à l‘approche des deux points asymptotiques autour desquels s'enroule la spirale.Euler est également le premier à établir un développement limité des coordonnées paramétriques des points de la courbe (en fonction de l’abscisse curviligne), en posant d'abord
 afin de simplifier l'expression des développements :
afin de simplifier l'expression des développements :ce qui permet alors de calculer (avec une convergence assez rapide et une bonne stabilité numérique) les coordonnées des points permettant de tracer la spirale (au moins pour des valeurs pas trop grandes de s). Grace à cette formulation Euler décrit précisément la forme que doit avoir la courbe complète, là où Bernouilli n'avait qu'une idée assez sommaire de sa forme générale (d'ailleurs l'imprimeur qui a publié les travaux de Bernouilli ne l'avait pas compris non plus puisque dans les représentations graphiques des arcs donnés par les schémas sommaires de construction géométrique, celui-ci a confondu la courbe de Bernoulli avec un arc de cercle, en complète contradiction avec la nécessité que le rayon de courbure soit en progression constante comme le mentionnait pourtant clairement Bernoulli). La forme complète de la courbe, en double spirale antisymétrique (avec une infinité de spires autour de chaque point limite), est établie par Euler.
Géométrie des spires
Si on s'intéresse au comportement de la courbe lorsque l'abscisse curviligne tend vers l'infini, étant donné que la courbure croit linéairement avec cette abscisse, le rayon de courbure décroit en même temps de façon inversement proportionnelle.
Par exemple entre deux points sur la clothoïde séparés par une longueur d'arc
 , la courbure
, la courbure  s'accroît de
s'accroît de  .
.Par conséquent le rayon de courbure passe de
 à
à  .
.La différence de rayon de courbure (mesuré hors du point d'inflexion sur la même branche de la double spirale, par exemple sur la branche du premier cadran, de coordonnées positives) est alors :
Cette différence de rayon de courbure ne fait que décroître à mesure que la longueur d'arc parcourue augmente, tandis que le nombre de spires (c'est-à-dire le nombre de tours complets faits par la direction de la tangente) augmente. Ce rayon de courbure décroissant étant de moins en moins différent, chaque spire se rapproche de plus en plus d'un cercle dont le périmètre
 décroissant s'approche aussi de plus en plus de la longueur de la spire elle aussi décroissante. De sorte que la différence de rayon de courbure à chaque spire quasi-circulaire s'approche elle aussi de plus en plus de :
décroissant s'approche aussi de plus en plus de la longueur de la spire elle aussi décroissante. De sorte que la différence de rayon de courbure à chaque spire quasi-circulaire s'approche elle aussi de plus en plus de : ,
,
une quantité négative qui ne peut décroître (en valeur absolue) que si le rayon est lui aussi décroissant.
D'autre part, on sait par définition que ce rayon de courbure ne peut pas devenir négatif quand s croit (avec un signe positif), de sorte que le rayon de courbure dans la branche positive de la clothoïde est nécessairement borné par une valeur inférieure. Le rayon de courbure suit donc une courbe asymptotique décroissante vers une valeur minimale non négative. Mais cette analyse géométrique simple ne permet pas de déterminer laquelle, ni donc de savoir si la courbe tend vers un point asymptotique ou vers un cercle de rayon minimal non nul, même si on en déduit que la courbe évoluera sur une longueur infinie, avec un nombre infini de spires, autour d'un point central dont la position n'a pas pu être déterminée précisément par Bernoulli.
Cependant, une simple observation de l'équation intrinsèque de la clothoïde permet de conclure à la convergence de la courbe vers un point unique et non un cercle, puisque le rayon de courbure est par définition inversement proportionnel à l'abscisse curviligne : si cette dernière tend vers l'infini, le rayon de courbure tend nécessairement vers zéro et non une valeur strictement positive.
Points asymptotiques de la spirale
Par la suite, il a fallu pas moins de 35 ans à Euler (lui encore) pour déterminer en 1781 les coordonnées des deux points asymptotiques autour desquels s’enroule la spirale (c'est-à-dire lorsque l'abscisse curviligne s tend vers plus ou moins l'infini), tout d'abord en démontrant que ces points limites existent (sous la forme d'un point unique de chaque côté, et non d'un cercle), puis pour en préciser la position exacte :
Euler a pour cela utilisé le changement de variable
 pour réécrire les intégrales donnant les coordonnées des points limites comme :
pour réécrire les intégrales donnant les coordonnées des points limites comme :pour ensuite résoudre ces intégrales à l’aide de la fonction Gamma (et qu'Euler appelle encore fonction Delta) déjà définie par Bernoulli dans un de ses ouvrages (publié de façon posthume en 1729) comme :
ainsi quelques autres manipulations de changement de variable sur une famille d’intégrales assez générales, dont les points limites de la spirale d'Euler ne sont que des cas particuliers. Pour cela il pose
 et
et  et dérive les intégrales suivantes :
et dérive les intégrales suivantes :pour obtenir la solution exposée plus haut, simplement pour p=0, q=1 et z=1/2, étant donné la valeur bien connue
 déjà donnée par Bernoulli.
déjà donnée par Bernoulli.On note toutefois que la convergence vers ces points limites est très lente (et même de plus en plus lente, les spires successives ne cessant de se resserrer), car cette convergence n'est pas visuellement évidente du tout lorsqu'on représente la clothoïde sur une longueur d'arc finie (même très élevée, ce qui pose vite des problèmes ardus pour l'évaluation numérique avec des abscisses curvilignes très éloignées de zéro, la stabilité numérique du développement limité ci-dessus n'étant plus établie non plus quand on s'éloigne de façon importante du point d'inflexion au centre de symétrie de la clothoïde).
Toutefois, on peut noter que chacune des spires successives se rapproche de plus en plus fortement de la forme de cercles concentriques, ce qui permet d'évaluer cette limite de façon stable, en choisissant judicieusement les abscisses curvilignes afin de parcourir une demi-spire à chaque itération. La suite des centres de spires estimés par cette méthode converge alors bien plus rapidement, mais ne permet pas de déterminer que ce centre limite sera le point limite de la clothoïde. Euler a donc dû démontrer l'unicité de ce point de convergence pour un bras donné de la spirale, même si une suite convergente n'est plus nécessaire pour formuler sa position exacte à l'aide de la constante pi.
Propriétés géométriques et interpolations
Moyennant seulement un changement de repère orthonormé de même orientation (équivalent à une combinaison linéaire d'une translation, d'une rotation et d'une homothétie de facteur strictement positif), toutes les clothoïdes sont bijectivement équivalentes à la clothoïde « unitaire » donnée par la définition ci-dessus (en fixant la constante a = 1).
Ainsi il est possible de déterminer une suite discrète de clothoïdes passant par deux points quelconques du plan, selon la donnée des seuls angles des tangentes en ces deux points par rapport au segment joignant ces deux points (ce segment constitue la « corde » qui sous-tend l'arc).
Si par ailleurs on fixe la déviation angulaire totale subie par les tangentes directrices le long du parcours de l'arc (par exemple la déviation minimale, les autres clothoïdes possibles ne se différenciant que par un nombre entier de spires parcourues dans un sens ou dans l'autre entre les deux points), on peut rechercher une clothoïde respectant cette contrainte (cette dernière pouvant aussi être ramenée à la clothoïde unitaire par un changement de repère orthonormé). On démontre facilement que cette clothoïde existe toujours (sauf dans le cas où les directions des tangentes sont alignées avec celle de la corde, un cas où l'arc unique se réduit alors à un segment de droite, considéré comme une clothoïde dégénérée mais impossible à identifier à la clothoïde unitaire par un changement de repère orthonormé), et que celle-ci est même unique.
De plus l'arc de cette clothoïde unique entre ces deux points et qui respecte les données angulaires des tangentes en ces points ne contient le point d'inflexion central de la clothoïde que si et seulement si les angles des tangentes par rapport à la corde sont de signes opposés.
Enfin cette clothoïde unique sera entièrement déterminée par la valeur de l'abscisse curviline s au milieu de l'arc entre les deux points (ce milieu étant celui séparant l'arc en deux sous-arcs de même longueur) ; on démontre facilement encore que cette abscisse curviligne s ne dépend que des seuls angles des deux tangentes sur ces deux points. De façon équivalente, cette abscisse curviligne unique fournit l'angle unique de la tangente passant par le point au milieu de l'arc, par rapport à la direction de la corde. Elle fournit aussi de façon équivalente la valeur unique de la courbure (l'inverse du rayon de courbure) à ce même milieu de l'arc.
Par conséquent, une fonction à double entrée, dont les données sont les deux angles (contraints par l'intervalle de déviation totale), permet de donner la valeur de cette courbure centrale.
Cette fonction est elle-même facilement interpolée par la donnée d'une matrice carrée unique (entièrement prédéfinie) dont les indices seraient des valeurs angulaires pour chacune des deux tangentes aux sommets de l'arc, et dont les éléments sont les valeurs de la courbure centrale, avec un nombre limité de valeurs angulaires possibles pour les tangentes aux deux sommets d'arcs donnés ; pour les autres valeurs angulaires de tangentes, une interpolation bicubique des courbures centrales obtenues dans la matrice fournit la valeur approchée avec une excellente précision :
- On obtient une erreur maximale sur la courbure centrale telle que le centre de l'arc de clothoïde unitaire idéal est estimé à une distance ne dépassant pas 10-4, si on utilise une matrice de seulement 32×32 entrées (dans le cas de la détermination de la clothoïde à déviation minimale), c’est-à-dire donnant les valeurs de courbure sont données dans la matrice uniquement pour des angles de tangentes dont les écarts sont de 11,25 degrés.
- Cette interpolation par une clothoïde proche de la clothoïde unique « idéale » peut être améliorée de façon très significative en augmentant la taille de la matrice (de plusieurs ordres de grandeurs sur l'erreur, si on ne fait que doubler chaque dimension de la matrice ; par exemple en utilisant une matrice 64×64 au lieu de 32×32, c'est-à-dire donnant la courbure centrale de la clothoïde d'interpolation idéale pour des angles de tangentes tous 5,625 degrés, ce qui donne alors une erreur maximale de courbure telle que le centre de l'arc idéal est estimé à une distance relative ne dépassant pas 6×10-6 fois la taille de la clothoïde unitaire idéale, toujours en utilisant une interpolation bicubique).
- Cette matrice prédéfinie possède plusieurs symétries et antisymétries si chaque dimension de la matrice contient un nombre pair d'éléments (on peut échanger les deux angles de tangente, en profitant de l'antisymétrie géométrique de la clothoïde par rapport à son centre, car elle peut être « parcourue » dans le sens inverse, ce qui équivaut aussi à une rotation de 180 degrés), ce qui permet aussi d'en réduire la taille de stockage (si nécessaire pour en augmenter la précision).
- La justification du fait qu'une taille faible pour la matrice fixe d'interpolation suffit vient du fait que la courbure au milieu de l'arc de clothoïde passant par deux points donnés avec des angles de tangentes donnés, suit une progression quasi-linéaire selon chaque angle donné, qui permet alors une interpolation bicubique de cette courbure centrale avec un nombre réduit de valeurs angulaires prédéterminées pour ces tangentes.
Cette propriété permet alors une recherche très efficace de la clothoïde unique par des méthodes numériques à convergence rapide et numériquement stables. La même méthode permet aussi de rechercher la position du point d'inflexion de la clothoïde (utile si on cherche à interpoler un arc de clothoïde entre deux points dont les tangentes forment avec la corde des angles de signes opposés), ou des points de coordonnées extrémales (là où les tangentes sont orientées parallèlement ou orthogonalement avec un des vecteurs du repère orthonormé, ou toute autre direction fixe).
Applications
En cinématique, la propriété fondamentale de la clothoïde se traduit par « une trajectoire qui, parcourue à vitesse constante, est telle que sa courbure varie linéairement ». La force centrifuge subie par un observateur circulant de façon continue le long de cette courbe varie donc continûment.
Concrètement, elle représente la trajectoire d'une automobile se déplaçant à vitesse stabilisée et dont on tourne le volant progressivement. C'est donc la trajectoire la plus « confortable », celle que l'on adopte pour le tracé des autoroutes et des voies ferrées. En pratique, on n'utilise cette courbe que pour assurer le raccordement progressif d'un alignement droit et d'un arc de cercle. Pour plus d'information, on se reportera à l'article sur le tracé en plan d'une route.
Pour les mêmes raisons, on utilise la clothoïde aux fins de courbes dans les tracés des chemins de fer parce qu'un véhicule suivant ce tracé à une vitesse constante subit une accélération angulaire continue mais pas constante, ce qui réduit à la fois les efforts sur les rails et l'inconfort des passagers dans les voitures. On retrouve cette courbe dans les boucles verticales ou loopings des montagnes russes pour le confort des passagers, afin que l'accélération verticale subie soit continue.
Enfin, les sabots montés sur les pylones de téléphériques, et qui supportent le cable porteur, adoptent cette forme. De fait, il est possible de faire circuler la cabine à sa vitesse maximale sur le pylone, sans incommoder les passagers.
Hors ces aspects cinématiques, la clothoïde intervient en sidérurgie pour aplanir ou cintrer les tôles et barres de grande épaisseur (au-delà de 30 mm). On limite ainsi le risque d'apparition de criques tout en ménageant le matériel. Typiquement, les outils concernés sont la coulée continue et les cintreuses.
D'autre part, une fois la clothoïde tracée, on peut en déduire des valeurs approchées d'expressions intervenant dans le calcul de la vibration résultante lors des phénomènes de diffraction. C'est la raison de l'utilisation de cette courbe par le physicien Alfred Cornu. Néanmoins, les moyens de calcul actuels l'ont fait tomber en désuétude pour cet usage.
Toutefois, pour le tracé de courbes à courbures faibles (c'est-à-dire des rayons de courbure élevés) ou devant exhiber des variations de courbure faibles au regard du rayon de courbure, on peut souvent substituer un arc elliptique à un arc de clothoïde, car la construction géométrique par des moyens purement mécaniques (comme la corde souple) d'un arc elliptique est plus simple si on arrive à positionner ses foyers et mesurer des longueurs importantes (du même ordre de grandeur que les rayons de courbure et la distance entre les foyers) ; la différence de forme et même de courbure entre les deux arcs est dans ce cas négligeable (si la déviation angulaire totale reste très inférieure au quart de tour) mais respecte la condition de continuité et de progression monotone de la courbure, même si cette progression n'est plus strictement linéaire.
De la même façon, il est possible dans les mêmes conditions de substituer des arcs de clothoïde par des arcs de courbes de Bézier, bien que celles-ci ne démontrent pas une simplification significative de leur construction (ni de leur approximation ou interpolation numérique). Des algorithmes efficaces ont ainsi été développés pour calculer des suites optimales d'arcs de Bézier (quadratiques ou cubiques) permettant d'interpoler avec une précision excellente les arcs clothoïdaux (et aussi de faire l'inverse), afin de réduire le nombre d'arcs nécessaires selon des contraintes d'erreurs métriques maximales faciles à respecter : ces algorithmes sont particulièrement efficaces dans le cadre de la conception de courbes à forme fixe tels que les glyphes de polices de caractères (ou dans le cadre de leurs transformations pour produire des glyphes dérivés), où les arcs clothoïdaux fournissent une stabilité numérique permettant de conserver les contraintes de continuité des tangentes et de progression monotone des courbures (ce que ne permettent pas directement les seuls arcs de Bézier, dont les subdivisions ne respectent même pas la conservation de la continuité des tangentes suite à une simple transformation linéaire non isométrique de leurs points de contrôle interpolés).
Voir aussi
Notes et références
- Article intitulé en latin Invenire curvam, quae ab appenso pondere flectitur in rectam ; h.e. construere curvam aa = sz, dans les Pensées, notes et remarques, n° CCXVI, de Jacques (ou Jacob) Bernouilli (1654–1705), initialement publié en 1694, puis de façon plus complète sous le titre Varia posthuma, au numéro XX du second volume de ses œuvres complètes Opéra, publiées de façon posthume en 1744.
Liens externes
- Description mathématique de la Spirale de Cornu
- Sur le site Mathcurve.com
- La Spirale de Cornu et les chemins de fer
Articles connexes
L’anti-clothoïde, plus couramment appelée développante du cercle, est la courbe que trace la main quand elle déroule une bobine de fil. Elle est utilisée dans la conception de profils d'engrenages.
Catégories :- Courbe
- Technologie dans les attractions











Wikimedia Foundation. 2010.