- Champ De Contrainte
-
Tenseur des contraintes
Articles scientifiques
sur les tenseursGénéralitésMathématiquesTenseur (mathématiques)
Produit tensoriel
... de deux modules
... de deux applications linéaires
Algèbre tensorielle
Champ tensoriel
Espace tensorielPhysiqueConvention d'Einstein
Tenseur métrique
Tenseur énergie-impulsion
Tenseur de Riemann
... de Ricci
... d'Einstein
... de Weyl
... de Levi-Civita
... de Killing
... de Killing-Yano
... de Bel-Robinson
... de Cotton-York
Tenseur électromagnétique
Tenseur des contraintes
Tenseur des déformationsArticles connexesPortail des MathématiquesPortail de la PhysiqueLe tenseur des contraintes est une représentation utilisée en mécanique des milieux continus pour représenter l'état de contrainte, c'est-à-dire les forces surfaciques (parfois appelées efforts) mises en jeu entre les portions déformées du milieu. Le terme a été introduit par Cauchy vers 1822.
Comme les forces surfaciques sont définies pour chaque surface coupant le milieu, le tenseur est défini en chaque point du solide, ou localement. L'état de contrainte du solide est donc représenté par un champ de tenseur. On parle aussi de ce fait de champ de contrainte.
Dans le cadre de l'élasticité linéaire, le champ de contrainte est relié au champ de déformation par la loi de Hooke généralisée, c'est-à-dire que l'on peut écrire l'équation tensorielle (et non algébrique) σ = Eε.
Dans le cadre de la géologie structurale et de la tectonique, on parle fréquemment de tenseur de paléo-contraintes. Il représente la partie anisotrope du tenseur des contraintes, responsable des déformations comme les plis, les failles ou les schistosités. La valeur absolue des termes de la matrice n'est pas accessible, mais il est possible de retrouver l'orientation du triaxe principal, ainsi que le rapport d'intensité entre ces trois axes.
Dans certains cas, il est possible de visualiser ces contraintes par la méthode de photoélasticimétrie.
Sommaire
Construction du tenseur
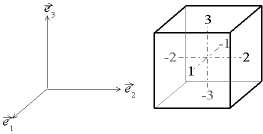
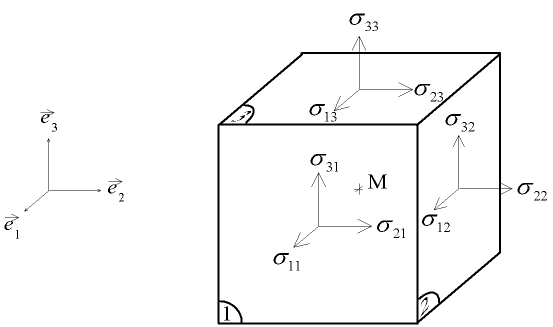
Prenons une base
 et un point M de la pièce. Considérons un cube de matière autour de M, d'arête infinitésimale dx = a, et dont les arêtes sont parallèles aux axes du repère.
et un point M de la pièce. Considérons un cube de matière autour de M, d'arête infinitésimale dx = a, et dont les arêtes sont parallèles aux axes du repère.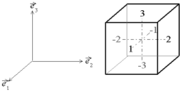 numérotation des faces du cube
numérotation des faces du cube
Numérotons ses faces :
- les faces i et -i sont les faces normales à
 , en partant du centre du cube, pointe vers i, la face -i étant la face opposée.
, en partant du centre du cube, pointe vers i, la face -i étant la face opposée.
Dans un premier temps, nous ne considérons que les faces numérotées positivement.
 Indices des composante du tenseur
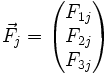
Indices des composante du tenseurSur la face j s'exerce un vecteur-force
 qui a trois composantes :
qui a trois composantes :Fij étant la composante selon
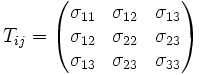
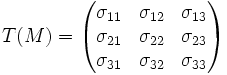
du vecteur-force s'exerçant sur la face j. La surface de chaque facette étant a2, on peut définir neuf composantes σij homogènes à des contraintes :On décrit donc l'état de contrainte par le tenseur
T est un tenseur d'ordre 2, à 3 lignes et 3 colonnes. Il est défini localement pour un point M donné.
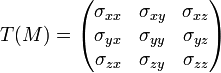
En mécanique, on n'utilise pas toujours la notation généralisée
 pour la base. Si l'on note la base
pour la base. Si l'on note la base  , les composantes du tenseur se notent alors :
, les composantes du tenseur se notent alors :Les termes hors diagonale correspondant à du cisaillement, on les note souvent τij , les composantes du tenseur se notent alors :
Symétrie du tenseur des contraintes
Lorsque le solide est à l'équilibre (les contraintes et déformations restent constantes dans le temps, il n'y a pas d'onde) et si l'on peut négliger les forces volumiques (en particulier le poids), alors le tenseur des contraintes est symétrique, c'est-à-dire que :
- σi j = σj i
cela traduit l'équilibre en moment d'un volume élementaire.
Le tenseur s'écrit donc :
 .
.
Du fait de cette symétrie, on peut écrire le tenseur comme un vecteur, selon la notation de Voigt : en définissant
- σ1 = σ11, σ2 = σ22, σ3 = σ33 ;
- σ4 = σ23, σ5 = σ31, σ6 = σ12 ;
On peut alors mettre le tenseur sous la forme :
 .
.
Ceci facilite l'écriture de la loi de Hooke généralisée. On voit aussi que l'espace des contraintes est un espace vectoriel à six dimensions.
Pression isostatique
La pression isostatique p est définie comme le tiers de la trace de la matrice, c'est-à-dire comme la moyenne des termes diagonaux :
Sa valeur ne dépend pas du repère x y z utilisé.
C'est une généralisation de la notion de pression hydrostatique dans les liquides. Dans le cadre de la géophysique, on parle de pression lithostatique. Toutefois, dans ces cas-là, on considère -p : une contrainte de compression a une valeur négative, p est donc négatif dans ces cas-là.
Principe de la coupure
Une manière simple de déterminer le tenseur des contraintes consiste à employer le « principe de la coupure ». Il s'agit d'une opération de pensée dans laquelle on scie l'objet selon un plan donné.
Supposons un solide se déformant sous l'effet de deux forces extérieures opposées. Si l'on coupe le solide en deux et que l'on sépare les moitiés, alors chaque moitié n'est soumise qu'a une seule force et donc n'est plus déformée mais mise en mouvement. Pour que chaque moitié retrouve sa déformation, il faut exercer une pression sur chacune des faces de la coupure.
Lorsqu'il y a des symétries évidentes à un problème, le choix de plans de coupe judicieux permet de déterminer de manière simple le tenseur des contraintes. C'est ainsi que l'on peut déterminer que dans le cas de la torsion d'un tube, on a un cisaillement pur.
Article détaillé : Principe de la coupure.Calcul des vecteurs-contrainte
Considérons le petit élément de volume dτ délimité par le tétraèdre de sommets M,(dx1,0,0),(0,dx2,0),(0,0,dx3). Les vecteurs normaux
 aux faces sont donc
aux faces sont donc  . La force
. La force  s'exerçant sur une face vérifie
s'exerçant sur une face vérifieoù
le vecteur caractéristique de la face, c'est-à-dire le vecteur normal ayant pour norme l'aire de la face.On a par exemple sur la face [M,(dx1,0,0),(0,dx2,0)], la relation
Contraintes principales
On peut trouver une base de l'espace tel que le tenseur des contraintes soit une matrice diagonale :
 .
.
Les valeurs σ1, σ2 et σ3 sont appelées contraintes principales (il ne faut pas les confondre avec les contraintes en notation de Voigt).
Invariants du tenseur des contraintes
Les contraintes principales permettent de déterminer les invariants du tenseur :
- I1 = σ1 + σ2 + σ3 = tr(Tij) ;
- I2 = σ1σ2 + σ2σ3 + σ1σ3 ;
- I3 = σ1σ2σ3 = det(Tij).
Notons que l'on a :
Déviateur
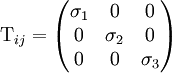
Le tenseur des contraintes peut se décomposer en une somme de deux tenseurs : le déviateur (sij ) et la pression isostatique p⋅(δij ) :
 .
.
Le déviateur a les mêmes directions principales que le tenseur des contraintes, on a alors dans ce repère :
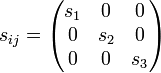 .
.
On peut définir des invariants pour le déviateur :
- J1 = s1 + s2 + s3 = tr(sij) = 0 ;
- J2 = − s1s2 − s2s3 − s1s3 ;
- J3 = s1s2s3 = det(sij).
Notons que l'on a aussi :
- J1 = s11 + s22 + s33 ;
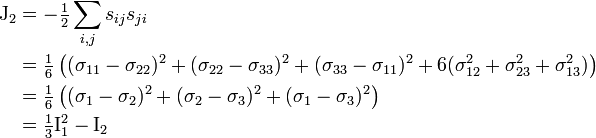 ;
;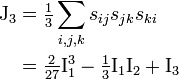 .
.
Ces invariants sont utiles pour définir le domaine élastique et le contrainte de comparaison.
Voir aussi
Articles connexes
- Jauge de déformation
- Détermination du tenseur des contraintes par diffraction de rayons X
- Cercle de Mohr (Christian Otto Mohr)
Liens externes
- (fr) Les critères de plasticité : complément d'information, ENS Cachan
- (en) [pdf] G. Backus, Continuum Mechanics, Samizdat Press
- (en) [pdf] B. Kennett, Lecture Notes for a Course on Continuum Mechanics, Samizdat Press
 Portail de la physique
Portail de la physique Portail de la géodésie et de la géophysique
Portail de la géodésie et de la géophysique Portail des sciences de la Terre et de l’Univers
Portail des sciences de la Terre et de l’Univers
Catégories : Mécanique des milieux continus | Tenseur | Géophysique | Géologie structurale - les faces i et -i sont les faces normales à





Wikimedia Foundation. 2010.