- Contrainte de comparaison
-
Critère de plasticité
Un critère de plasticité, ou critère d'écoulement plastique, est un critère permettant de savoir, sous des sollicitations données, si une pièce se déforme plastiquement ou si elle reste dans le domaine élastique. De nombreux essais ont montré que l'on pouvait utiliser deux critères principaux : le critère de Tresca-Guest ou le critère de von Mises. En résistance des matériaux, on désire toujours rester dans le domaine élastique, on parle donc parfois de critère de résistance.
La contrainte de comparaison n'est pas une contrainte réelle existant à un instant donné à l'intérieur d'un solide, mais est utilisée en mécanique pour prédire la rupture. Néanmoins, la plupart des ingénieurs l'utilisent pour déterminer si un champ de contrainte donné dans un pièce est acceptable ou non. On parle aussi de contrainte équivalente ou de contrainte effective. Elle découle des critères de plasticité.
Cette contrainte est comparée à la limite d'élasticité ou encore la contrainte de rupture obtenue par essai de traction.
Sommaire
Problématique
Approche élémentaire
Plaçons nous dans le cas d'un état de contraintes planes.
Dans le cas de la traction uniaxiale d'une pièce d'un matériau ductile, la limite au delà de laquelle on a une déformation plastique est la limite élastique Re : pour une traction d'axe x, on reste dans le domaine élastique si

Ceci correspond à une limite admissible en résistance des matériaux : au delà, les pièces se déforment de manière irréversible. On divise cette limite par un coefficient de sécurité s dépendant du domaine d'utilisation de la pièce ; du fait de ce coefficient de sécurité, on utilise en général un signe inférieur ou égal :

Dans le cas de structures , les variations de forme(entailles, trous, congés...) entrainent des concentrations de contraintes. On peut admettre localement un dépassement de la limite d'élasticité sans déformation significative de la structure. Dans tous les cas, la contrainte nominale, si elle correspond à une condition d'équilibre statique, doit rester inférieure à la limite d'élasticité.
On provoque de la déformation plastique si

cette situation est recherchée dans le cas de la mise en forme (laminage, forgeage, pliage, emboutissage, …).
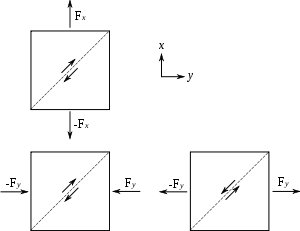 Sollicitation de la pièce selon deux axes : si l'on a de la traction sur les deux axes, les cissions résultantes sur le plan à 45° s'opposent ; si l'on a de la traction et de la compression, les cissions s'ajoutent
Sollicitation de la pièce selon deux axes : si l'on a de la traction sur les deux axes, les cissions résultantes sur le plan à 45° s'opposent ; si l'on a de la traction et de la compression, les cissions s'ajoutent
On sait que la déformation plastique se fait par cisaillement : il est bien plus aisé de faire glisser des atomes les uns sur les autres. La cission (ou contrainte de cisaillement) est maximale pour un plan incliné de 45 ° par rapport à l'axe de traction (voir l'article Cercle de Mohr).
Supposons maintenant que l'on sollicite la pièce selon x et y. On obtient la cission résultante en projetant les forces de traction ou compression sur le plan à 45 °. Nous voyons que :
- si l'on a de la traction sur x et sur y, les cissions résultant s'opposent, on atteint donc moins vite la limite élastique ; la situation est identique si l'on a de la compression sur les deux axes ;
- si l'on a de la traction sur x et de la compression sur y, les cissions résultant s'ajoutent, on atteint donc plus vite la limite élastique.
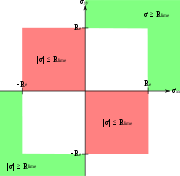 Contraintes nécessaires pour atteindre la limite élastique
Contraintes nécessaires pour atteindre la limite élastiqueSi nous représentons la frontière R entre domaine élastique et domaine plastique sur un graphique (σxx, σyy), alors
- les contraintes valent Re sur les axes (traction ou compression uniaxiale) ;
- les contraintes pour atteindre R sont plus élevées que Re lorsqu'elle sont de même signe ;
- les contraintes pour atteindre R sont plus faibles que Re lorsqu'elle sont de signes opposés.
Dans un cas plus général, on considère les contraintes principales σ1 et σ2. Dans le cas de contrainte tridimensionnelles, on considère σ1, σ2 et σ3.
Généralisation
L'espace des contraintes est à six dimensions (le tenseur comporte neuf termes mais est symétrique, voir Notation de Voigt). Le domaine élastique et le domaine plastique sont séparés par une hypersurface à cinq dimensions. Cette hypersurface est en général représentée comme une surface de dimension deux dans l'espace des contraintes principales (σ1, σ2, σ3). Cette surface est donc de la forme
 .
.Critères de limite élastique
 Critères de Tresca-Guest et de von Mises
Critères de Tresca-Guest et de von MisesCritère de Tresca
Puisque la déformation plastique se fait par cisaillement, le critère de Tresca[1], ou critère de Tresca-Guest, considère la cission déterminée selon le cercle de Mohr. Dans le cas de contraintes planes, la condition de déformation élastique devient :
- |σ1 - σ2 | ≤ Re.
Le graphique est un hexagone.
Dans le cas de contrainte tridimensionnelles, on a :
- |σ1 - σ2 | ≤ Re ou |σ1 - σ3 | ≤ Re ou |σ2 - σ3 | ≤ Re
ou encore
- maxi ≠ j(|σi - σj |) ≤ Re.
La surface limite est un prisme à base hexagonale dont l'axe est la trissectrice des trois axes (σ1, σ2, σ3).
Critère de von Mises
Le critère dit de von Mises fut formulé par Maxwell en 1865. Huber (1904) la développa partiellement dans un article en polonais[2]. Cependant, sa paternité est généralement attribuée à von Mises (1913)[3]. On parle aussi parfois de la théorie de Maxwell–Huber–Hencky–von Mises, ou de critère de Prandtl-Reuss.
Le critère de von Mises est un critère énergétique : l'énergie de déformation élastique s'écrit
- U = ½σε en traction-compression
- — ou —
- U = ½τγ en cisaillement.
Cette énergie ne doit pas dépasser une valeur limite si l'on veut rester dans le domaine élastique. En contraintes planes, le critère de von Mises s'écrit :
Ce qui est l'équation d'une ellipse.
Dans le cas de poutres soumises à une flexion (générant une contrainte normale maximale σmax) et à une torsion (générant une cission maximale τmax), le critère devient (forme de Huber) :
 .
.
De manière générale, l'énergie de distorsion élastique s'écrit :
où J2 est le second invariant du déviateur du tenseur des contraintes et G est le module de cisaillement.
Le critère est alors :
 ,
,
soit
ou encore
 .
.
La surface limite est un cylindre dont l'axe est la trissectrice des trois axes (σ1, σ2, σ3).
- Note
Il existe un autre critère de von Mises qui évalue la fragilité intrinsèque d'un matériau cristallin en fonction du nombre de modes de déformation plastique possible du cristal, voir Fragilité.
Contrainte de comparaison
La contrainte de comparaison, ou contrainte effective σe, est une valeur calculée à partir du tenseur des contraintes. On compare ensuite cette valeur à la limite élastique pour savoir si l'on est dans le domaine élastique ou plastique. Cela revient en fait à ramener tout problème à de la traction uniaxiale.
On définit classiquement deux contraintes effectives :
- la contrainte de Tresca :
 ;
;
- la contrainte de von Mises :
 .
.
La frontière entre le domaine plastique et le domaine élastique est la surface σe = Re :
- σe < Re : domaine élastique ;
- σe > Re : domaine plastique.
En résistance des matériaux, la condition de résistance s'écrit :
- σe ≤ Re/s.
Les programmes de calcul par éléments finis représentent en général le champ de contrainte équivalente par une carte de couleur, le bleu correspondant à une contrainte nulle et le rouge à la contrainte équivalente maximale. On peut ainsi détecter le ou les points critiques de la pièce.
Autres critères de limite élastique
Critère de Rankine
Le critère de Rankine énonce simplement que pour rester dans le domaine élastique, aucune contrainte principale ne doit dépasser la limite élastique :
- max(|σ1|, |σ2|, |σ3|) ≤ Re.
Dans le cas de contraintes planes, la frontière dessine un carré dans le plan (σ1, σ2).
Critère de Mohr-Cacquot
Critère de Coulomb
Autres systèmes de coordonnées
L'hypersurface délimitant le domaine élastique peut aussi être représentée comme une surface de dimension deux dans l'espace des invariants du tenseur des contraintes I1 et du déviateur J1 et J2. Cette surface est donc de la forme
- ƒ(I1, J1, J2) = 0.
Dans le cas des matériaux dont la cohésion est assurée par l'adhérence (frottement), comme les sols, on utilise les variables p, q et r :
- ƒ(p, q, r ) = 0
avec
 ;
; , la contrainte équivalente ;
, la contrainte équivalente ;![r = 3 \sqrt[3]{\tfrac{1}{2} \mathrm{J}_3}](/pictures/frwiki/56/8e04b7003ead6ce33abea2cfdbab49de.png) .
.
On peut aussi décrire l'espace par des coordonnées cylindriques, les coordonnées de Haigh-Westergaard (ξ, ρ, θ) :
- ƒ(ξ, ρ, θ) = 0
avec
 ;
; ;
;- θ est l'angle de Lode[4], défini par
 .
.
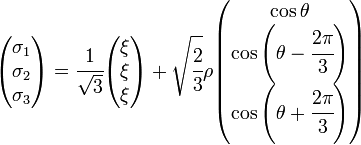
Dans les coordonnées de Haigh-Westergaard, les contraintes principales s'écrivent :
Notes
- ↑ Tresca, H. (1864). Mémoire sur l'écoulement des corps solides soumis à de fortes pressions. C.R. Acad. Sci. Paris, vol. 59, p. 754.
- ↑ R. Hill, The Mathematical Theory of Plasticity, Oxford, Clarendon Press (1950)
- ↑ Ford, Advanced Mechanics of Materials, Longmans, London, 1963
- ↑ Lode, W. (1926). Versuche ueber den Einfuss der mitt leren Hauptspannung auf das Fliessen der Metalle Eisen Kupfer und Nickel
Voir aussi
Bibliographie
- Jean-Louis Fanchon, Guide de mécanique, Nathan, 2001.
p. 380-381, 413-416, 445-452
- Claude Hazard, Frédy Lelong, Bruno Quinzain, Mémotech — Structures métalliques, Casteilla, 1997.
p. 343
- D. Spenlé, R. Gourhant, Guide du calcul en mécanique, Hachette, 2003.
p. 204
Articles connexes
Liens externes
- (fr) Les critères de plasticité : complément d'information, ENS Cachan
 Portail du génie mécanique
Portail du génie mécanique
Catégories : Génie mécanique | Mécanique des milieux continus






Wikimedia Foundation. 2010.