- Holonomie
-
En mathématiques, et plus précisément en géométrie différentielle, l'holonomie d'une connexion sur une variété différentielle est une mesure de la façon dont le transport parallèle le long de boucles fermées modifie les informations géométriques transportées. Cette modification est une conséquence de la courbure de la connexion (ou plus généralement de sa "forme"). Pour des connexions plates, l'holonomie associée est un type de monodromie, et c'est dans ce cas une notion uniquement globale. Pour des connexions de courbure non nulle, l'holonomie a des aspects locaux et globaux non triviaux.
Toute connexion sur une variété donne naissance, grâce aux applications de transport parallèle, à une notion d'holonomie. Parmi les exemples importants, on trouve : l'holonomie de la connexion de Levi-Civita (appelée holonomie riemannienne), les holonomies des connexions des fibrés vectoriels, l'holonomie des connexions de Cartan (en), et l'holonomie des connexions des fibrés principaux. Dans chacun de ces cas, l'holonomie de la connexion peut s'identifier à un groupe de Lie, le groupe d'holonomie. L'holonomie d'une connexion est étroitement liée à sa courbure, par le théorème d'Ambrose-Singer.
Sommaire
Exemples et définitions informelles
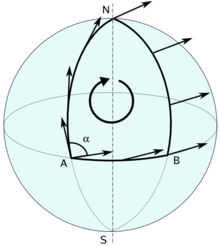 Le transport parallèle sur une sphère dépend du chemin suivi. Le transport par A → N → B → A donne un vecteur distinct du vecteur initial. Cette différence est mesurée par l'holonomie de la connexion.
Le transport parallèle sur une sphère dépend du chemin suivi. Le transport par A → N → B → A donne un vecteur distinct du vecteur initial. Cette différence est mesurée par l'holonomie de la connexion.
Sur la figure ci-contre, on voit que le vecteur indiqué tourne de l'angle α lorsqu'on le déplace parallèlement le long du trajet ANBA. Dans ce déplacement, l'ensemble des vecteurs du plan tangent en A subit donc une rotation de α (le plan tangent lui-même subit également une translation) ; cette transformation (nécessairement une isométrie vectorielle) est ainsi associée au chemin fermé ANBA, qui est un lacet de la sphère. L'ensemble de toutes ces transformations (pour tous les lacets) forme un sous-groupe du groupe des isométries vectorielles du plan (il s'agit dans ce cas du groupe des rotations SO(2)), qu'on appelle le groupe d'holonomie de la sphère. Plus précisément, l'angle α associé ainsi à un lacet mesure (dans ce cas) la courbure de la surface qu'il délimite ; on le vérifie aisément pour un triangle sphérique, en remarquant qu'alors α est égal à la somme des angles du triangle moins π, ce qui, d'après la formule de Girard, est aussi égal à l'aire du triangle divisé par le carré du rayon de la sphère.
Dans le cas d'une surface sans courbure, les lacets contractiles correspondent à l'identité du plan tangent, mais l'holonomie n'est pas forcément triviale ; ainsi, sur un ruban de Möbius, le transport parallèle autour du ruban renverse l'orientation, ce qui correspond à une symétrie (vectorielle) ; le groupe d'holonomie est dans ce cas réduit à deux éléments.
En dimensions supérieures, les lacets ne découpent plus de régions, mais permettent encore de définir l'holonomie ; ainsi, si on considère la figure comme représentant un lacet de la 3-sphère, on vérifie que les vecteurs de l'espace (de dimension 3) tangent en A subissent une rotation d'angle α et d'axe le vecteur orthogonal aux deux vecteurs tangents aux arcs AN et AB; le groupe d'holonomie est alors dans ce cas le groupe des rotations SO(3).
Définitions rigoureuses
Holonomie d'une connexion d'un fibré vectoriel
Soit E un fibré vectoriel de rang k sur une variété différentielle M et soit ∇ une connexion sur E. Étant donnée un lacet dérivable par morceaux γ : [0,1] → M avec γ(0)= x, la connexion définit une application de transport parallèle Pγ :
 . Cette application est un automorphisme de Ex, et donc définit un élément de GL(Ex). Le groupe d'holonomie de ∇ en x est défini par
. Cette application est un automorphisme de Ex, et donc définit un élément de GL(Ex). Le groupe d'holonomie de ∇ en x est défini parLe groupe d'holonomie restreint en x est le sous-groupe
 correspondant aux lacets γ contractiles.
correspondant aux lacets γ contractiles.Si M est connexe, les groupes d'holonomie de deux points de base x et y sont isomorphes : si γ est un chemin de x vers y dans M, alors
Le choix d'une autre identification de Ex avec Rk donne un autre sous-groupe conjugué. Parfois, en particulier pour des discussions générales ou informelles (comme ci-dessous), on ne mentionne pas le point de base, la définition étant alors supposée faite à une conjugaison près.
Parmi les propriétés importantes du groupe d'holonomie, on a :
- Hol0(∇) est un sous-groupe de Lie[1] connexe de GL(k, R).
- Hol0(∇) est la composante connexe de l'identité (appelée aussi composante neutre) de Hol(∇).
- Il y a un homomorphisme de groupe surjectif naturel π1(M) → Hol(∇)/Hol0(∇), où π1(M) est le groupe fondamental de M, qui envoie la classe d'homotopie [γ] vers la classe Pγ·Hol0(∇).
- Si M est simplement connexe, alors Hol(∇) = Hol0(∇).
- ∇ est plate (de courbure nulle en tout point) si et seulement si Hol0(∇) est trivial.
Holonomie d'une connexion d'un fibré principal
La définition de l'holonomie d'une connexion sur un fibré principal est analogue à la précédente. Soit G un groupe de Lie et P un G-fibré principal au dessus d'une variété différentielle paracompacte M. Soit ω une forme connexion (en) sur P. Étant donnés un lacet dérivable par morceaux γ : [0,1] → M avec γ(0)= x, et un point p de la fibre au-dessus de x, la connexion définit un unique relèvement horizontal
![\tilde\gamma\colon [0,1] \to P](6/9f6c9097be57ad57eb38cf16cb069c09.png) tel que
tel que  . L'extrémité
. L'extrémité  du relèvement ne sera pas en général p, mais un autre point p.g de la fibre. On définit une relation d'équivalence ~ sur P en disant que p~q s'ils peuvent être reliés par un chemin P horizontal et différentiable par morceaux.
du relèvement ne sera pas en général p, mais un autre point p.g de la fibre. On définit une relation d'équivalence ~ sur P en disant que p~q s'ils peuvent être reliés par un chemin P horizontal et différentiable par morceaux.Le groupe d'holonomie de ω (en p) est alors défini par
Le groupe d'holonomie restreint en p est le sous-groupe
 correspondant aux relèvements horizontaux de lacets γ contractiles.
correspondant aux relèvements horizontaux de lacets γ contractiles.Si M et P sont connexes, le groupe d'holonomie ne dépend du point de base p qu'à une conjugaison près (dans G). Plus précisément, si q est un autre point de base, il existe un g unique de G tel que q ~ p g, et alors :
- Holq(ω) = g − 1Holp(ω)g.
En particulier,
De plus, si p~q, Holp(ω) = Holq(ω).
Comme précédemment, on omet parfois la référence au point de base, en raisonnant à une conjugaison près.
Parmi les propriétés importantes du groupe d'holonomie et du sous-groupe restreint, on a :
- Hol0p(ω) est un sous-groupe de Lie connexe de G.
- Hol0p(ω) est la composante connexe de l'identité de Holp(ω).
- Il y a un homomorphisme naturel de groupe, surjectif π1(M) → Holp(ω)/Hol0p(ω).
- Si M est simplement connexe, Holp(ω) = Hol0p(ω).
- ω est plate (de courbure nulle) si et seulement si Hol0p(ω) est trivial.
Fibrés d'holonomie
Soit M une variété différentielle connexe et paracompacte, et P un G-fibré principal avec une connexion ω, comme ci-dessus. Soit
 un point arbitraire du fibré. Notons H(p) l'ensemble des points de P qui peuvent être reliés à p par un chemin horizontal. On peut alors montrer que H(p), avec l'application de projection évidente, est un fibré principal au-dessus de M, de groupe structural Hol0p(ω). Ce fibré principal s'appelle le fibré d'holonomie (à travers p) de la connexion. La connexion ω se restreint à une connexion H(p), puisque les applications de transport parallèle conservent H(p). Ainsi, H(p) est un fibré réduit pour la connexion. De plus, puisque aucun sous-fibré H(p) n'est conservé par transport parallèle, c'est la réduction minimale de ce type[2].
un point arbitraire du fibré. Notons H(p) l'ensemble des points de P qui peuvent être reliés à p par un chemin horizontal. On peut alors montrer que H(p), avec l'application de projection évidente, est un fibré principal au-dessus de M, de groupe structural Hol0p(ω). Ce fibré principal s'appelle le fibré d'holonomie (à travers p) de la connexion. La connexion ω se restreint à une connexion H(p), puisque les applications de transport parallèle conservent H(p). Ainsi, H(p) est un fibré réduit pour la connexion. De plus, puisque aucun sous-fibré H(p) n'est conservé par transport parallèle, c'est la réduction minimale de ce type[2].Comme pour les groupes d'holonomie, le fibré d'holonomie est transformé de manière uniforme par déplacement dans le fibré principal ambiant P. Plus précisément, si,
 est un autre point de base, il existe un unique
est un autre point de base, il existe un unique  tel que q ~ p g (puisque, par hypothèse, M est connexe par arcs). Ainsi H(q) = H(p) g. Par conséquent, les connexions induites correspondant à différents choix de points de base sont compatibles entre elles : leurs applications de transport parallèle ne diffèrent que de g.
tel que q ~ p g (puisque, par hypothèse, M est connexe par arcs). Ainsi H(q) = H(p) g. Par conséquent, les connexions induites correspondant à différents choix de points de base sont compatibles entre elles : leurs applications de transport parallèle ne diffèrent que de g.Monodromie
Article détaillé : Monodromie.Le fibré d'holonomie H(p) est un fibré principal pour Holp(ω), et admet donc également une action du groupe restreint d'holonomie Hol0p(ω) (qui est un sous-groupe normal du groupe d'holonomie complet). Le groupe discret Holp(ω)/Hol0p(ω) est appelé le groupe de monodromie de la connexion ; il agit sur le fibré quotient H(p)/Hol0p(ω). Il y a un homomorphisme surjectif φ : π1(M) → Holp(ω)/Hol0p(ω), tel que φ(π1(M)) agit sur H(p)/Hol0p(ω). Cette action du groupe fondamental s'appelle une représentation de monodromie du groupe fondamental[3].
Holonomie locale et infinitésimale
Si π:P→M est un fibré principal, et si ω est une connexion de P, l'holonomie de ω peut être restreinte à la fibre au-dessus d'un ouvert de M. Plus précisément, si U est un ouvert connexe de M, la restriction de ω est une connexion du fibré π-1U sur U. L'holonomie (respectivement l'holonomie restreinte) de ce fibré sera notée par Holp(ω, U) (respectivement Holp0(ω, U)) pour chaque p tel que π(p)∈U.
Si U⊂V sont deux ouverts contenant π(p), il y a une inclusion évidente
Le groupe local d'holonomie en un point p est défini par
pour toute famille d'ouverts connexes emboités, Uk, telle que
 .
.Le groupe local d'holonomie a les propriétés suivantes :
- C'est un sous-groupe de Lie connexe du groupe restreint d'holonomie Holp0(ω).
- Chaque point p admet un voisinage V tel que Holp*(ω)=Holp0(ω,V). En particulier, le groupe local d'holonomie ne dépend que du point p, et non du choix de la famille Uk.
- L'holonomie locale est invariante par translation par les éléments du groupe structural G de P, c'est-à- dire que Holpg*(ω)=Ad(g-1)Holp*(ω) pour tous les g∈G (d'après la première propriété, le groupe d'holonomie local est un sous-groupe de Lie connexe de G, donc son adjoint est bien défini).
Le groupe local d'holonomie n'a pas de comportement global prévisible. En particulier, sa dimension peut ne pas être constante. Cependant, on a le résultat suivant :
- Si la dimension du groupe local d'holonomie est constante, les holonomies locales et restreintes coïncident : Holp*(ω)=Holp0(ω).
L’holonomie infinitésimale est l'algèbre de Lie du groupe d'holonomie restreinte.
Le théorème d'Ambrose-Singer
Le théorème d'Ambrose-Singer relie l'holonomie d'une connexion d'un fibré principal à la forme courbure (en) de la connexion ; on peut le voir comme généralisant le cas familier d'une connexion affine (ou d'une connexion du fibré tangent — la connexion de Levi-Civita, par exemple), où la courbure provient du déplacement le long d'un parallélogramme infinitésimal.
Dans le détail, si σ : [0,1] × [0,1] → M est une surface de M paramétrée par un couple de variables x et y, un vecteur V peut être transporté le long de la frontière de σ : le long de (x,0), puis de (1,y), puis de (x,1) (dans le sens négatif), et enfin de (0,y), revenant à l'origine. C'est un cas particulier d'un lacet d'holonomie : l'élément du groupe d'holonomie correspondant au relèvement de la frontière de σ agit sur le vecteur V. La courbure intervient explicitement quand le parallélogramme tend vers 0, en traversant la frontière de parallélogrammes plus petits (sur [0,x] × [0,y]) ; cela revient à prendre la dérivée des applications de transport parallèle en x=y=0 :
où R est le tenseur de courbure[4]. Ainsi, on peut dire en gros que la courbure donne l'holonomie infinitésimale sur une boucle fermée (le parallélogramme infinitésimal). Plus rigoureusement, la courbure est la différentielle de l'action de l'holonomie en l'identité du groupe d'holonomie ; en d'autres termes, R(X,Y) est un élément de l'algèbre de Lie de Holp(ω).
En général, considérons l'holonomie d'une connexion d'un fibré principal P → M au-dessus de P, avec G comme groupe structural. Notant g l'algèbre de Lie de G, la forme courbure de la connexion est une 2-forme Ω, à valeurs dans g sur P. Le théorème d'Ambrose-Singer affirme que[5] :
- L'algèbre de Lie de Holp(ω) est engendrée par les éléments de g de la forme Ωq(X,Y), où q parcourt l'ensemble des points qui peuvent être reliés à p par une courbe horizontale (q ~ p), et X et Y sont des vecteurs horizontaux tangents en q.
Le théorème peut se réénoncer à l'aide du fibré d'holonomie[6] :
- L'algèbre de Lie de Holp(ω) est le sous-espace de g engendré par les éléments de la forme Ωq(X,Y), où q ∈ H(p) et X et Y sont des vecteurs horizontaux en q.
Holonomie riemannienne
L'holonomie d'une variété riemannienne (M, g) est simplement le groupe d'holonomie de la connexion de Levi-Civita sur le fibré tangent de M. Une variété riemannienne 'générique' de dimension n a une holonomie O(n) (ou SO(n) si cette variété est orientable). Les variétés dont l'holonomie est un sous-groupe propre de O(n) ou SO(n) ont des propriétés particulières.
Un des premiers résultats fondamentaux concernant l'holonomie riemannienne est le théorème de Borel et Lichnerowicz (1952)[7], qui affirme que le groupe d'holonomie est un sous-groupe de Lie fermé de O(n). En particulier, il est compact.
Holonomie réductible et décomposition de de Rham
Soit x un point arbitraire de M. Le groupe d'holonomie Hol(M) agit sur l'espace tangent TxM. En tant que représentation de groupe, cette action peut être irréductible, ou il peut exister une décomposition de TxM en sous-espaces orthogonaux TxM = T′xM ⊕ T′′xM, chacun de ces sous-espaces étant invariant sous l'action de Hol(M). Dans ce dernier cas, on dit que M est réductible.
Supposons que M soit une variété réductible. Quand x varie, les fibrés T′xM et T′′xM forment des distributions lisses, qui sont intégrables au sens de Frobenius. Les variétés intégrales (en) de ces distributions sont des sous-variétés complètement géodésiques. Ainsi, M est localement un produit cartésien M′ × M′′. L'isomorphisme (local) de de Rham en résulte, en continuant ce processus jusqu'à ce qu'une réduction complète de l'espace tangent soit achevée[8] :
- Soit M une variété riemannienne simplement connexe[9], et TM = T(0)M ⊕ T(1)M ⊕ ... ⊕ T(k)M la réduction complète du fibré tangent sous l'action du groupe d'holonomie. Supposons que T(0)M soit formé de vecteurs que le groupe d'holonomie laisse invariants (donc, tels que la représentation d'holonomie soit triviale). Alors, M est localement isométrique à un produit
 , où V0 est un ouvert d'un espace euclidien, et chaque Vi est une variété intégrale pour T(i)M. De plus, Hol(M) se décompose en produit direct des groupes d'holonomie de chaque Mi.
, où V0 est un ouvert d'un espace euclidien, et chaque Vi est une variété intégrale pour T(i)M. De plus, Hol(M) se décompose en produit direct des groupes d'holonomie de chaque Mi.
Si, de plus, M est supposée être géodésique (en), alors le théorème est vrai globalement, et chaque Mi est une variété géodésique[10].
La classification de Berger
En 1955, Marcel Berger donna une classification complète des groupes d'holonomie correspondants aux variétés riemanniennes simplement connexes, irréductibles (ne s'identifiant pas localement à un espace produit) et non symétriques (n'étant pas localement un espace symétrique). La liste de Berger est la suivante :
Hol(g) dim(M) Type de variété Commentaires SO(n) n variété orientable U(n) 2n variété de Kähler Kähler SU(n) 2n variété de Calabi-Yau courbure de Ricci nulle, Kähler Sp(n)·Sp(1) 4n variété de Kähler quaternionique (en) variété einsteinienne (en) Sp(n) 4n variété hyperkählerienne (en) courbure de Ricci nulle, Kähler G2 7 courbure de Ricci nulle Spin(7) 8 variété Spin(7) (en) courbure de Ricci nulle (la liste originale de Berger envisageait également Spin(9) comme sous-groupe de SO(16) ; mais, comme on le verra plus bas, les variétés riemanniennes ayant cette holonomie sont nécessairement localement symétriques, ce qui fut montré (indépendamment) par D. Alekseevski et Brown-Gray). On sait désormais que toutes ces possibilités sont réalisées en tant que groupes d'holonomie de variétés riemanniennes ; des exemples des deux derniers cas furent particulièrement difficiles à découvrir.
On remarque que Sp(n) ⊂ SU(2n) ⊂ U(2n) ⊂ SO(4n), et donc toute variété hyperkählerienne (en) est une variété de Calabi-Yau, toute variété de Calabi-Yau est une variété de Kähler, et toute variété de Kähler est orientable.
Cette étrange liste fut expliquée par la preuve de Simon du théorème de Berger. Une preuve géométrique simple de ce théorème fut donnée par C. Olmos en 2005. On montre d'abord qui si une variété riemannienne n'est pas localement symétrique et que l'holonomie réduite agit de façon irréductible sur l'espace tangent, elle agit transitivement sur la sphère unité. Les groupes de Lie agissant transitivement sur les sphères sont connus : ils forment la liste précédente, ainsi que deux autres cas : le groupe Spin(9) agissant sur R16, et le groupe T·Sp(m) agissant sur R4m. Enfin, on vérifie que le premier de ces deux cas ne peut apparaître comme groupe d'holonomie que pour des espaces localement symétriques (qui sont localement isomorphes au plan projectif de Cayley), et que le second n'est jamais un groupe d'holonomie.
Holonomie spéciale et spineurs
Les variétés munies d'une holonomie spéciale jouent un rôle fondamental dans la théorie des spineurs, en particulier de celle des spineurs simples (en)[11]. On a les résultats suivants :
- Hol(ω) ⊂ U(n) si et seulement si M admet un champ projectif parallèle (constant de manière covariante) de spineurs simples.
- Si M est une variété munie d'une structure de spin (en), alors Hol(ω) ⊂ SU(n) si et seulement si M admet un champ parallèle de spineurs simples. En fait, un champ parallèle de spineurs simples détermine une réduction canonique du groupe de structure à SU(n).
- Si M est une variété de spin de dimension 7, M admet un champ parallèle de spineurs simples non trivial si et seulement si le groupe d'holonomie est contenu dans G2.
- Si M est une variété de spin de dimension 8, M admet un champ parallèle de spineurs simples non trivial si et seulement si le groupe d'holonomie est contenu dans Spin(7).
De même, les holonomies unitaires et spéciales unitaires sont souvent étudiées en relation avec la théorie des twisteurs[12], ainsi que dans l'étude des variétés presque complexes (en)[11].
Applications à la théorie des cordes
Les variétés riemanniennes munies d'une holonomie spéciale jouent un rôle important en théorie des cordes, et plus particulièrement dans les techniques de compactification (en)[13]. Cela vient de ce que ces variétés admettent des champs de spineurs parallèles, et conservent ainsi une partie de la supersymétrie initiale. C'est en particulier le cas des variétés de Calabi-Yau ayant pour holonomie SU(2) ou SU(3), et des compactifications des modifier] Holonomie affine
Les groupes d'holonomie affine sont les groupes d'holonomie des connexions affines dont le tenseur de torsion (en) est nul ; ceux qui ne sont pas riemanniens ou pseudo-riemanniens sont aussi appelés des groupes d'holonomie non métriques. Le théorème de décomposition de de Rham ne s'applique pas aux groupes d'holonomie affine, et une classification complète semble donc inaccessible. Cependant, il reste naturel de classifier les holonomies affines irréductibles.
Au cours de sa classification des groupes d'holonomie riemannienne, Berger obtint deux critères que doit satisfaire l'algèbre de Lie du groupe d'holonomie d'une connexion affine sans torsion non localement symétrique ; le premier critère de Berger, conséquence du théorème d'Ambrose-Singer, est que la courbure doit engendrer l'algèbre (le second critère de Berger, plus technique, provient de l'exigence de non-symétrie locale). Berger donna une liste de groupes agissant de manière irréductible, et satisfaisant ces deux critères ; on peut l'interpréter comme une liste des possibilités d'holonomies affines irréductibles.
Par la suite, il fut montré que cette liste de Berger était incomplète : d'autres exemples furent découverts par R. Bryant (en 1991) et par Q. Chi, S. Merkulov, et L. Schwachhöfer (en 1996); ils sont parfois appelés des holonomies exotiques. Cette recherche mena finalement à une classification complète des holonomies affines irréductibles par Merkulov et Schwachhöfer (en 1999), Bryant montrant en 2000 que chaque groupe de leur liste se réalise effectivement comme un groupe d'holonomie affine.
La classification de Merkulov-Schwachhöfer a été simplifiée par la découverte d'une relation entre les groupes de la liste et certains espaces symétriques, les espaces symétriques hermitiens et les espaces symétriques Kähler-quaternioniques. Cette relation est particulièrement claire dans le cas des holonomies complexes affines, comme cela fut démontré par Schwachhöfer (2001).
La correspondance de SchwachhöferSoit V un espace vectoriel complexe de dimension finie, soit H ⊂ Aut(V) un sous-groupe de Lie irréductible, semi-simple et connexe, et soit K ⊂ H un sous-groupe compact maximal de H.
- S'il existe un espace symétrique hermitien irréductible de la forme G/(U(1) · K), alors H et C∗ · H sont des groupes d'holonomie affine non-symétriques irréductibles, où V est la représentation tangente de K.
- S'il existe un espace symétrique Kähler-quaternionique irréductible de la forme G/(Sp(1) · K), alors H est un groupe d'holonomie affine non-symétrique irréductible, et il en est de même de C∗ · H si dim V = 4. Ici, la représentation complexifiée tangente de Sp(1) · K est C2 ⊗ V, et H laisse invariante une forme complexe symplectique sur V.
Ces deux familles donnent naissance à tous groupes d'holonomie affine non-symétriques irréductibles complexes, en dehors des trois suivants :
Utilisant la classification des espaces hermitiens symétriques, la première famille correspond aux groupes d'holonomie affine suivants :
where ZC is either trivial, or the group C*.
De même, la classification des espaces symétrique Kähler-quaternioniques amène aux groupes d'holonomie suivants :
(dans la seconde ligne, ZC doit être trivial sauf si n = 2.)
À partir de ces listes, on peut observer un analogue du résultat de Simon affirmant que les groupes d'holonomie riemannienne agissent transitivement sur les sphères : les représentations des holonomies complexes sont toutes des espaces vectoriels préhomogènes (en). On ne connait pas de démonstration synthétique de ce résultat.
La classification des holonomies affines irréductibles réelles se déduit des listes précédentes à l'aide d'une analyse soigneuse utilisant le fait que les holonomies affines réelles se complexifient pour donner des holonomies affines complexes.
Historique
La notion d'holonomie fut introduite par Élie Cartan en 1926 dans le but d'étudier et de classifier les espaces symétriques. Ce n'est que longtemps après que les groupes d'holonomie furent utilisés pour étudier la géométrie riemannienne dans un cadre plus général. En 1952, Georges de Rham démontra le théorème de décomposition de de Rham, permettant de décomposer une variété riemannienne en produit cartésien de variétés, en décomposant le fibré tangent en sous-espaces irréductibles sous l'action du groupe local d'holonomie. En 1953, M. Berger complèta ce théorème en donnant une classification des holonomies irréductibles ; ces résultats devaient trouver des applications en physique, en particulier en théorie des cordes.
Étymologie
Un mot similaire, "holomorphe", fut introduit par deux des élèves de Cauchy, Briot et Bouquet, qui le formèrent à partir du grec ὅλος (holos), signifiant "entier", et μορφή (morphē) signifiant "forme" ou "apparence"[14].
L'étymologie de "holonomie" est plus obscure : S. Golwala l'attribue à Poinsot[15], qui aurait introduit le mot dans son analyse du mouvement du solide, l'utilisant pour parler de systèmes permettant de déterminer l'information globale à partir de données locales, le mot étant forgé à partir de holos et de νόμος (nomos), signifiant "loi" (mais voir aussi -nomie pour d'autres significations possibles de ce suffixe).
Notes
- C'est-à-dire que l'inclusion canonique est une immersion
- S. Kobayashi et K. Nomizu, Foundations of Differential Geometry, §II.7
- R.W.Sharpe, Differential Geometry: Cartan's Generalization of Klein's Erlangen Program, §3.7
- M. Spivak, A comprehensive introduction to differential geometry, Volume II,, p.241
- S. Sternberg, Lectures on differential geometry, théorème VII.1.2
- S. Kobayashi et K. Nomizu, Foundations of Differential Geometry, §II.8
- Armand Borel et André Lichnerowicz, Groupes d'holonomie des variétés riemanniennes
- S. Kobayashi et K. Nomizu, Foundations of Differential Geometry, §IV.5
- Ce théorème se généralise à des variétés non simplement connexe, mais son énoncé est alors plus compliqué.
- S. Kobayashi et K. Nomizu, Foundations of Differential Geometry, §IV.6
- H. B. Lawson et M-L. Michelsohn, Spin Geometry, §IV.9-10
- H. Baum, Th. Friedrich, R. Grunewald et I. Kath, Twistors and Killing spinors on Riemannian manifolds
- Steven S. Gubser, Special holonomy in string theory and M-theory (TASI lectures).
- A.I.Markushevich et R.A. Silverman, Theory of functions of a Complex Variable, 2ème éd., p.112
- S. Golwala, Lecture Notes on Classical Mechanics for Physics 106ab, p. 65–66.
Références
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Holonomy » (voir la liste des auteurs)
- Élie Cartan, Sur une classe remarquable d'espaces de Riemann (1) , Bull. Soc. Math. France, vol. 54, pp. 214–264 (1926)
- Élie Cartan, Sur une classe remarquable d'espaces de Riemann (2) , Bull. Soc. Math. France, vol. 55, pp. 114–134 (1927)
- Armand Borel et André Lichnerowicz, Groupes d'holonomie des variétés riemanniennes, Comptes rendus de l'Académie des sciences, vol. 234, pp. 1835–1837 (1952)
- (en) Ambrose W. Singer et Isadore M. Singer, A theorem on holonomy, Trans. Amer. Math. Soc., vol.75, pp. 428–443 (1953)
- Marcel Berger, Sur les groupes d'holonomie des variétés à connexion affine et des variétés riemanniennes, Bull. Soc. Math. France, vol. 83, pp. 279–330 (1953)
- (en) S. Kobayashi et K. Nomizu, Foundations of Differential Geometry, Vol. 1 & 2, Wiley-Interscience (1963 ; nouvelle édition en 1996)
- (en) M. Spivak, A comprehensive introduction to differential geometry (vol. II), Publish or Perish (1999)
Pour aller plus loin
- (en) Literature about manifolds of special holonomy, une bibliographie due à Frederik Witt.
Voir aussi










Wikimedia Foundation. 2010.