- Théorème de Helly
-
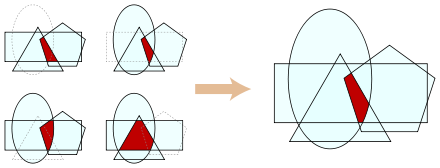 Théorème de Helly dans le plan : si trois quelconques des convexes de la famille se rencontrent alors l'intersection de tous ces convexes est non vide.
Théorème de Helly dans le plan : si trois quelconques des convexes de la famille se rencontrent alors l'intersection de tous ces convexes est non vide.
Le théorème de Helly est un résultat combinatoire sur les convexes.
Ce résultat a été prouvé en 1913 par Eduard Helly, et il a été publié par Johann Radon en 1921[1],[2].
Sommaire
Énoncé
Théorème — On considère
 une famille finie de n ensembles convexes de Rd (où on suppose que
une famille finie de n ensembles convexes de Rd (où on suppose que  ). On suppose que, pour tout choix de d + 1 convexes parmi , ces d + 1 convexes se rencontrent. Il existe alors un point qui appartient à tous les Xi.
). On suppose que, pour tout choix de d + 1 convexes parmi , ces d + 1 convexes se rencontrent. Il existe alors un point qui appartient à tous les Xi.Il est facile d'étendre le théorème à des familles infinies d'ensembles convexes, en rajoutant une hypothèse de compacité
Corollaire — Si
 est une collection de sous-ensembles compacts convexes de Rd et que pour toute partie
est une collection de sous-ensembles compacts convexes de Rd et que pour toute partie  finie de cardinal inférieur ou égal à d + 1,
finie de cardinal inférieur ou égal à d + 1,  alors l'intersection de tous les Xi est non vide, c'est-à-dire :
alors l'intersection de tous les Xi est non vide, c'est-à-dire :  .
.Preuves
On donne la preuve dans le cas fini (le cas infini se ramène au cas fini par un argument de compacité).
Il y a plusieurs preuves du théorème de Helly[3], mais toutes se prêtent bien à être aiguillées par l'énoncé intermédiaire suivant :
Énoncé intermédiaire — Dans un espace affine de dimension d, soit
 un d + 2-uplet de points. Pour chaque indice i variant entre 1 et d + 2, on note
un d + 2-uplet de points. Pour chaque indice i variant entre 1 et d + 2, on note  l'enveloppe convexe des points de A autres que le point ai.
l'enveloppe convexe des points de A autres que le point ai.Il existe alors un point commun aux d + 2 simplexes Δi.
Dans tous les modes de démonstration, il y a un travail géométrique un peu subtil à faire pour parvenir à cet énoncé intermédiaire ; en revanche terminer la preuve ne demande pas d'idée bien compliquée.
Commençons donc par le plus facile, en montrant que l'énoncé intermédiaire entraîne le théorème de Helly sous la forme donnée plus haut.
Supposons d'abord que n = d + 2. Les hypothèses du théorème assurent l'existence d'un point a1 qui se trouve dans l'intersection des
 .
.De la même manière on peut définir pour tout
 un élément aj dans l'intersection des
un élément aj dans l'intersection des 
Appliquons l'énoncé intermédiaire à ces points : il fournit un point x qui est à la fois dans tous les simplexes Δi. Mais, par définition de Δi, tous les sommets de ce simplexe sont dans Xi. Donc x est un point de Xi pour tout i.
À présent, raisonnons par récurrence : supposons que n > d + 2 et que le résultat soit vrai au rang n − 1. Le raisonnement précédent montre que toute intersection de d + 2 ensembles convexes est non vide. On considère la nouvelle collection obtenue en remplaçant Xn − 1 et Xn par l'ensemble

Dans cette nouvelle collection, chaque intersection de d + 1 ensembles est non vide. L'hypothèse de récurrence implique donc que l'intersection de cette nouvelle collection est non vide ; mais cette intersection est la même que celle de la collection initiale.
On va maintenant donner plusieurs preuves de l'énoncé intermédiaire.
Première preuve : via le théorème de Radon
S'il y a une répétition dans la liste de points
 , disons aj = ak, avec
, disons aj = ak, avec  , alors aj est clairement dans l'intersection
, alors aj est clairement dans l'intersection  , et la propriété est prouvée. Sinon, on applique le théorème de Radon à l'ensemble
, et la propriété est prouvée. Sinon, on applique le théorème de Radon à l'ensemble  .
.Ce théorème assure l'existence de deux sous-ensembles disjoints
 tels que l'enveloppe convexe de A1 intersecte celle de A2. Il existe donc un point x appartenant à l'intersection des deux enveloppes convexes de A1 et A2. On va montrer que l'intersection des Δi contient ce point x, ce qui démontrera l'énoncé intermédiaire.
tels que l'enveloppe convexe de A1 intersecte celle de A2. Il existe donc un point x appartenant à l'intersection des deux enveloppes convexes de A1 et A2. On va montrer que l'intersection des Δi contient ce point x, ce qui démontrera l'énoncé intermédiaire.Prenons
. Si  , alors
, alors  , et par conséquent tous les points de A2 sont des ak avec
, et par conséquent tous les points de A2 sont des ak avec  . Or de tels points sont dans Δj par définition, et donc
. Or de tels points sont dans Δj par définition, et donc  . Comme Δj est convexe, il contient alors l'enveloppe convexe de A2 et par conséquent on a :
. Comme Δj est convexe, il contient alors l'enveloppe convexe de A2 et par conséquent on a :  . De la même manière, si
. De la même manière, si  , alors
, alors  , et le même raisonnement donne . Le point x fourni par Radon est donc bien commun à tous les Δi.
, et le même raisonnement donne . Le point x fourni par Radon est donc bien commun à tous les Δi.Deuxième preuve : via le théorème de Carathéodory
On munit l'espace affine d'une structure euclidienne.
Sur le polytope compact enveloppe convexe des points de
, on considère la fonction continue f définie par :puis on prend un point x de ce polytope en lequel elle admet son minimum. Montrer que les simplexes se rencontrent revient donc à montrer que f(x) = 0.
Le théorème de Carathéodory assure qu'on peut extraire de A une sous-famille avec seulement d + 1 points dont x est barycentre à coefficients positifs, autrement dit qu'il existe un indice i tel que x appartient à Δi. Quitte à renuméroter les points de A, on supposera que x appartient à Δ1.
Pour
![\theta\in[0,1]](a/47a3741e5d5e897fe367d00a31461023.png) , on va noter xθ = (1 − θ)x + θa1 le point courant du segment [x,a1].
, on va noter xθ = (1 − θ)x + θa1 le point courant du segment [x,a1].L'idée de la fin de la preuve est alors la suivante : puisque a1 est dans
 , quand on fait glisser xθ le long du segment [x,a1] en direction de a1, ce point se rapproche de tous les simplexes
, quand on fait glisser xθ le long du segment [x,a1] en direction de a1, ce point se rapproche de tous les simplexes  . Par ailleurs, il s'éloigne peut-être de Δ1, mais au départ il en était à distance nulle et pour θ petit il en est encore à distance très petite et donc sans influence sur la valeur f(xθ) (puisque c'est un Max) —du moins si
. Par ailleurs, il s'éloigne peut-être de Δ1, mais au départ il en était à distance nulle et pour θ petit il en est encore à distance très petite et donc sans influence sur la valeur f(xθ) (puisque c'est un Max) —du moins si  . Le résultat de ces observations, c'est que f(xθ) commence par diminuer quand θ augmente en restant suffisamment petit, et diminue même strictement si . Ceci contredit la minimalité de f(x).Exécution technique de l'idée ci-dessus
. Le résultat de ces observations, c'est que f(xθ) commence par diminuer quand θ augmente en restant suffisamment petit, et diminue même strictement si . Ceci contredit la minimalité de f(x).Exécution technique de l'idée ci-dessusPrenons
![\theta\in]0,1]](a/43aa23db8c183917abe5a85b33883afc.png) et accumulons des informations sur f(xθ).
et accumulons des informations sur f(xθ).- Tout d'abord, puisque la valeur f(x) est le minimum de f,
- Ensuite, soit un indice i avec
 . Notons πi(x) la projection de x sur le convexe fermé Δi. En remarquant que le point (1 − θ)πi(x) + θa1 est sur Δi (comme point d'un segment dont les deux extrémités sont sur Δi), la distance de xθ à Δi est inférieure ou égale à la distance de xθ à (1 − θ)πi(x) + θa1, qui vaut (1 − θ)d(x,Δi).
. Notons πi(x) la projection de x sur le convexe fermé Δi. En remarquant que le point (1 − θ)πi(x) + θa1 est sur Δi (comme point d'un segment dont les deux extrémités sont sur Δi), la distance de xθ à Δi est inférieure ou égale à la distance de xθ à (1 − θ)πi(x) + θa1, qui vaut (1 − θ)d(x,Δi).
L'inégalité (1) peut donc se préciser en :
Si f(x)=0, on a terminé. Sinon, l'inégalité précédente entraîne alors l'inégalité beaucoup plus simple :
 dans laquelle, en faisant tendre θ vers 0, on trouve encore f(x) = 0.
dans laquelle, en faisant tendre θ vers 0, on trouve encore f(x) = 0.Troisième preuve : par le théorème de Carathéodory et le lemme de Farkas
On va montrer le théorème par l'absurde. Supposons donc l'intersection des Δi vide.
Chacun des simplexes Δi est une intersection d'un nombre fini de demi-espaces. Énumérons la liste complète de ces demi-espaces
 de
de  . On remarque tout de suite que l'intersection des Δi est égale à l'intersection des Rj qui est donc elle aussi vide.
. On remarque tout de suite que l'intersection des Δi est égale à l'intersection des Rj qui est donc elle aussi vide.Pour chacun de ces demi-espaces, prenons une forme affine fj pour laquelle
 .
.Par le lemme de Farkas sous sa forme de critère de consistance pour un système d'inéquations affines, il existe donc une combinaison linéaire à coefficients positifs des fj égale à la forme constante − 1. Dit autrement, il existe un λ > 0 tel que − λ soit dans l'enveloppe convexe des fj.
Par le théorème de Carathéodory, il existe une sous-collection d'au plus d + 1 de ces fj qui contienne encore − λ dans son enveloppe convexe. En réappliquant le lemme de Farkas (dans ce sens c'est une évidence), l'intersection des Rj correspondants est alors vide.
Pour chacun d'entre eux, prenons un simplexe qu'il contient parmi la liste des Δi : ces simplexes sont au plus d + 1 donc se rencontrent par hypothèse. C'est contradictoire.
Application
Dans le plan, soient S1, …, Sq des segments portés par q droites parallèles. Si les segments Si admettent trois à trois une sécante commune alors il existe une droite qui les rencontre tous. En effet, en choisissant un repère pour lequel les Si sont parallèles à l'axe Oy, les Xi = { (a,b) | la droite d'équation y = ax+b rencontre Si } sont des convexes de R2 auxquels on peut appliquer le théorème de Helly.
Notes et références
- (de) Johann Radon, « Mengen konvexer Körper, die einen gemeinsamen Punkt enthalten », dans Math. Ann., 83:113-115, 1921
- (en) Jiří Matoušek (en), Lectures on Discrete Geometry [détail des éditions]
- Les deux premières données ci-dessous sont adaptées de l'ouvrage d'Eggleston référencé ci-dessous, p. 33-34 pour la première, qui est celle publiée par Radon, p. 39-40 pour la seconde. La troisième est de Terence Tao qui l'a publiée sur son blog le 30 novembre 2007 et est disponible en ligne.
- (en) H. G. Eggleston, Convexity, CUP
- (en) S. R. Lay, Convex Sets and Their Applications, Wiley
Voir aussi
Théorème de Kirchberger, par exemple dans (en) Alexander Barvinok, A Course in Convexity, AMS, coll. « GSM (en) » (no 54), 2002 (ISBN 978-0-82182968-4), p. 21
Catégories :- Analyse convexe
- Géométrie convexe
- Théorème de géométrie






Wikimedia Foundation. 2010.