- Propulsion maritime
-
 Moteur principal d'un pétrolier géant VLCC
Moteur principal d'un pétrolier géant VLCC
La propulsion maritime désigne l'ensemble des systèmes qui permettent aux navires et bateaux de se déplacer. Elle est effectuée par un propulseur entraîné par un moteur. Le propulseur peut être :
- une force naturelle (courant d'un fleuve entraîné par la gravité),
- une force extérieure animale (halage) ou mécanique (remorqueur ou pousseur).
- un système mécanique embarqué transformant une énergie extérieure :
- une voile utilisant la force du vent,
- un système mécanique embarqué transformant une énergie embarquée :
- un aviron utilisant la force musculaire,
- une hélice ou un autre système (roue à aubes, treuil) entraîné par un moteur.
Sommaire
Objectifs
Un système de propulsion répond à plusieurs objectifs :
- Fournir une poussée propulsive avec le meilleur rendement possible, pour consommer moins de carburant à une vitesse donnée. Le rendement de propulsion dépend du rendement énergétique du moteur (consommation spécifique), du rendement mécanique de la transmission et du rendement hydrodynamique du propulseur.
- Fonctionner avec sûreté dans des conditions diverses : vitesse de croisière, vitesse lente, mauvaises conditions météorologiques (mer formée), à pleine charge ou sur ballast...
- Assurer la manœuvrabilité en marche, soit directement (poussée vectorielle), soit par l'intermédiaire d'un ou plusieurs gouvernails.
- Permettre, dans certains cas, la manœuvre à l'arrêt et à basse vitesse (effet différentiel, effet sur le ou les gouvernails).
- Sur certains navires, un poids minimum est recherché (par exemple pour de petites embarcations, ou sur un remorqueur). Pour d'autres, c'est un volume minimum (frégates, transporteurs de voitures...)
Propulsion animale
Un certain nombre de constructions flottantes ne disposent pas de système de propulsion autonome et ont besoin d'une intervention externe pour se déplacer. C'est le cas des barges fluviales : elles étaient autrefois halées par des chevaux marchant le long des berges d'un canal, parfois par des personnes quand le bateau était suffisamment léger.
Propulsion humaine
 L'embarcation à droite est déplacée par une perche en présence de petits fonds, mais l'aviron sert aussi de godille en eaux libres.
L'embarcation à droite est déplacée par une perche en présence de petits fonds, mais l'aviron sert aussi de godille en eaux libres.Dans cette expression, le terme "propulsion" désigne en fait le moteur et non le propulseur. Les anglais utilisent l'expression plus exacte "human powered". La propulsion est humaine quand une personne utilise ses mains (et ses pieds) comme propulseur pour se déplacer dans l'eau ou sur l'eau.
En appui sur le fond
Utilisation d'une perche, ou d'un aviron quand la profondeur est suffisamment faible.
En appui sur l'eau
La force musculaire est probablement la première force motrice utilisée sur un navire, comme sur la barque solaire de Chéops avec son système d'aviron.
La rame
De manière générale, ce type de propulsion consiste à actionner une rame formée d'un manche et d'une pelle immergée ; la rame peut soit être reliée au bateau par un ou deux tolets, une dame de nage ou une engoujure, soit être tenue à deux mains. L'action effectuée consiste en un va-et-vient régulier, en alternant une phase de poussée pelle dans l'eau et une phase de retour pelle hors de l'eau, ou en alternant des phases de poussée entièrement dans l'eau pour la godille.
L'action de la pelle dans l'eau est de deux sortes : avec la godille, la pelle agit comme une aile, avec un angle d'incidence réduit maintenant un écoulement attaché sur les deux faces de la pelle; avec l'action de ramer, la pelle pousse l'eau directement vers l'arrière du bateau, en écoulement complètement décroché.

Applications :
- La godille consiste à actionner un aviron à l'arrière du bateau, par un mouvement oscillant dans le plan transversal. La godille est très pratiquée pour la propulsion des annexes, pour sa simplicité (un seul aviron qui pivote dans une échancrure du tableau arrière), son rendement (la pelle travaille en faible incidence, comme un profil d'aile) et ses avantages en manœuvre d'accostage (pas d'encombrement latéral comme pour les rames). On peut godiller debout ou assis, d'une seule main. La godille était utilisée notamment en Bretagne par des passeurs (ou des passeuses, comme à Lanildut en Finistère), sur des barques plutôt lourdes, pour transporter plusieurs personnes d'une rive à l'autre.
- La pagaie, où une rame est actionnée sur le côté du bateau, sans point d'appui, ce qui nécessite l'emploi des deux mains. Elle est utilisée sur les pirogues et canoës (où chaque pagayeur ne pagaie que d'un côté), sur les kayaks (où le rameur pagaie des deux côtés alternativement), et en secours sur certains dériveurs.
- La nage où les rameurs, assis et faisant face à l'arrière de l'embarcation, actionnent l'aviron, articulé sur un pivot, par traction ; on le trouve sur les bateaux du même nom. Ce système fut le plus utilisé de façon historique, conjointement à la voile, en particulier pour la guerre navale. Les galères naviguant en croisière grâce à leur voilure, utilisaient au combat la force combinée de plusieurs rangs de rameurs, répartis des deux côtés sur plusieurs étages, ce qui permettait d'atteindre des vitesses et une maniabilité nécessaires aux manœuvres d'éperonnage, et de s'affranchir de la dépendance au vent quand la situation tactique l'exigeait.
- La vogue où le ou les rameurs, debout et faisant face à l'avant de l'embarcation, actionnent l'aviron, également articulé sur un pivot, par poussée. Ce système est principalement utilisé autour de la Méditerranée sur des bateaux de relativement petite taille.
Hélice immergée
- l'hélice est actionnée par un levier ou un vilebrequin : premiers sous-marins autonomes à énergie musculaire, le Turtle, le Nautilus de Robert Fulton;
- l'hélice est actionné grâce à un pédalier, comme sur une bicyclette. Ce système est utilisé par quelques engins de vitesse de type hydroptère et surtout par des petites embarcations de bord de plage de type pédalo, l'hélice étant alors parfois remplacée par une roue à aubes.
Hélice aérienne
- l'hélice est actionnée grâce à un pédalier : engin de vitesse Decavitator, vitesse 18.5 nds !
- Différente de propulsion ''humaine''
-

Aviron olympique, utilisant la nage
-

Un pédalo au lac de Donkmeer, Pays-Bas
Propulsion vélique
La propulsion vélique consiste à utiliser la force du vent (le moteur) pour propulser un voilier, le plus souvent grâce à des voiles (le propulseur). Les nombreuses combinaisons de formes et de dispositions de voiles ont donné naissance à une grande variété de gréements, mais aussi à des formes de coques spécialement étudiées pour ce type de propulsion.
Principe
Article détaillé : Voile (navire).De même que la pelle d'une rame, une voile peut fonctionner de deux façons :
1. la voile peut être placée à peu près perpendiculairement au vent, qui la « pousse » et fait ainsi avancer le bateau. Dans ce cas, l'écoulement est dit "décroché" et le rendement est moyen; c'est le type de fonctionnement de tous les voiliers quand ils suivent une route parallèle au vent dite "vent arrière".
2. la voile peut être placée avec un angle d'incidence plus faible avec le vent (moins de 20°) ; dans ce cas, le vent agit sur la voile comme sur une aile d'avion, l'écoulement est dit "attaché" sur les deux faces de la voile. Il se produit une dépression relative "sous le vent" (côté bombé) de la voile qui s'ajoute à la pression relative du côté "au vent" pour propulser le bateau. Quand le vent vient de côté la force exercée par la voile n'est pas dans l'axe du bateau. La composante transversale de cette force est une force de dérive (dérapage latéral) qui doit être compensée par la portance d'un plan anti-dérive quille ou "dérive". La force du vent entraîne une gîte (inclinaison latérale) qu'il faut limiter par l'effet d'un lest fixe et/ou du déplacement latéral du poids de l'équipage ou d'une masse mobile (ballast).Afin de porter la voilure, il y a besoin d'un support surélevé (en général un mât), d'un moyen d'établir la voilure (drisses) et de l'orienter par différents cordages (écoutes). Selon le type voile, il peut y avoir besoin d'espars supplémentaires, comme une bôme ou un whishbone pour une grand'voile, un tangon pour un foc ou un spinnaker. Les différentes formes de voiles et la façon de les établir sur un ou plusieurs mâts permettent de caractériser les gréements.
Gréements
Article détaillé : Gréement. Détail du gréement d'un grand voilier à Amsterdam.
Détail du gréement d'un grand voilier à Amsterdam.Deux types de gréements, opposés par leur origine géographique, ont fini par se combiner pour obtenir la voilure idéale en termes d'efficacité et de souplesse :
- le type dit latin, et son dérivé aurique, où la voile est au repos alignée dans l'axe du bateau est originaire des contrées méditerranéennes, adapté aux changements d'allures et à celles proches du vent, nécessaire dans ces mers resserrées.
- Le type dit carré est originaire des pays nordiques et océaniques, où la voile est perpendiculaire à l'axe du navire, plus adapté aux grandes distances avec un vent sur l'arrière.
Si les premiers voiliers ne comportaient qu'une seule voile, la combinaison de plusieurs voiles en les répartissant en hauteur et en longueur permet d'améliorer la manœuvrabilité du bateau et d'adapter la voilure aux conditions de navigation. La combinaison de différentes formes de voiles sur un seul bateau survient avec les caraques ; les vaisseaux construits par la suite montrent une grande inventivité dans les gréements. Actuellement, les gréements se sont à nouveau simplifiés et n'intègrent plus que deux ou trois voiles, souvent en matériaux synthétiques.
Les voiles, du fait de leur caractère très économique et de l'autonomie qu'elles permettent, étaient utilisées sur la plupart des navires même après l'arrivée de la vapeur, jusqu'à la fin du XIXe siècle, où la navigation à voile atteignit son apogée technique avec des quatre-mâts et cinq-mâts de plus de 100 m de long menés par des équipages réduits. Par la suite, le besoin de vitesse et de régularité d'exploitation, l'autonomie permise par le diesel, et le droit du travail imposant trois bordées au lieu de deux, entraînèrent sa disparition pour les navires de guerre d'abord, et de commerce ensuite. Les derniers grands voiliers marchands, qui avaient résisté sur les cargaisons lourdes au long cours, comme les nitrates du Chili, disparurent en quelques années dans la décennie 1950 (naufrage du Pamir en 1957). Quelques utilisations de niche subsistèrent jusque dans les années 1970. De nos jours, les voiles restent utilisées sur les petits voiliers et sur certains yachts de luxe, pour la navigation de plaisance (loisir) ou sportive.
Voiles rigides
- Des gréements à voiles "rigides" ont été utilisés sur de voiliers de course type catamaran, notamment de type Classe C (mini Coupe America). Ce sont généralement des mâts-ailes profilés comportant des parties mobiles faisant office de volets de courbure, profilées elles aussi. Une mécanique complexe permet de positionner les différents éléments pour obtenir une voilure à simple ou double fente présentant des coefficients de portance élevés.
- Un système expérimental est la turbovoile, où un mât rotatif utilise l'effet Magnus pour créer une portance, à la manière d'une voile. Si certains projets ont intégré ce concept comme l'Alcyone, il n'a pas connu d'application commerciale, malgré un bon rendement, en raison de la complexité de la machinerie requise et de sa fragilité, nécessitant une coque spécialement conçue.
Voiles libres
Une voile "libre" n'est pas établie sur un gréement; c'est une voilure souple reliée au bateau par un câble en tension. Sa forme (type parapente) doit lui procurer la stabilité aérodynamique nécessaire à son maintien dans l'air. Un cerf-volant de traction est actuellement en mise au point par la firme allemande SkySails afin de permettre des économies de combustible qui pourraient aller de 10 à 30%. Les essais réels ont eu lieu en décembre 2007 sur le Beluga Skysails de type cargo (132 mètres de long, 9770 tonnes). La surface de l'aile qui vole entre 100 et 300 mètres d'altitude est de 160 m², la force de traction étant de l'ordre de 5 tonnes. La vitesse de route de ce navire est de 15.5 nds soit un Nombre de Froude de 0.22. A cette vitesse la traînée relative est de l'ordre de 0.0025, ce qui donne une traînée (résistance à l'avancement) de l'ordre de 25 tonnes. La traction de la voile vaut alors 20 % de la traînée. En février 2008, ce navire est en cours de voyage de Brême (Allemagne) en direction du Venezuela.
Limitations du système :- . angle mort de 50° de part et d'autre de la direction d'où vient le vent,
- . vitesse du navire inférieure à 16 nds.
Propulsion motorisée
La propulsion motorisée consiste à actionner un propulseur grâce à un moteur. Ce système était introduit au début du XIXe siècle avec la machine à vapeur actionnant une roue à aubes, l'énergie étant fournie par la combustion du charbon. Les premiers travaux et applications pratiques, furent réalisés par l'américain Robert Fulton dès 1803. Depuis, d'autres systèmes, plus efficaces, ont été créés.
Dans toute propulsion motorisée, on peut distinguer quatre fonctions principales :
- le stockage à bord d'une forme d'énergie,
- la transformation par un moteur de l'énergie disponible en énergie mécanique ;
- la transmission de cette énergie vers le propulseur,
- la transformation de cette énergie en force motrice par le propulseur.
L'énergie
Carburants fossiles (charbon, fuel lourd, gazole, essence), énergie nucléaire, électricité, (énergie musculaire). Stockage à bord. à développer.
Le moteur
Le moteur est chargé de transformer l'énergie primaire du combustible en énergie mécanique et / ou électrique, parfois hydraulique. Les deux principales catégories sont les moteurs à combustion externe (chaudières et machines ou turbines à vapeur) et ceux à combustion interne (moteurs Diesel, moteurs à essence et turbines à gaz).
Combustion externe : la vapeur
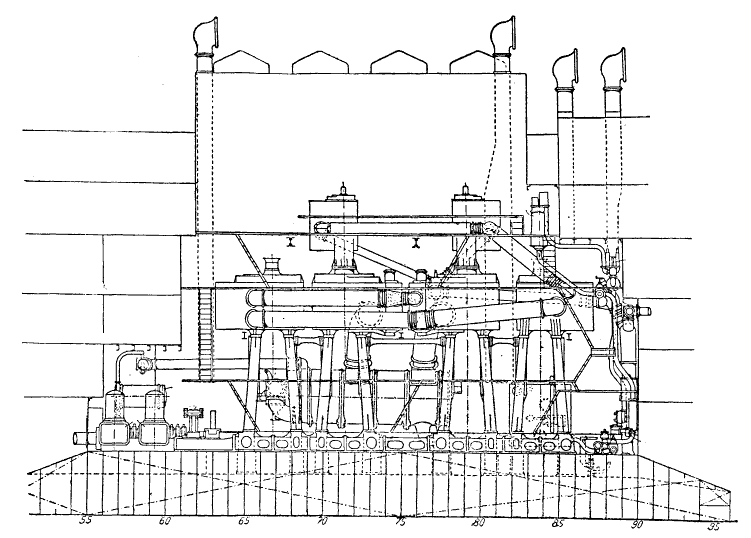
Articles détaillés : Machine à vapeur et Turbine.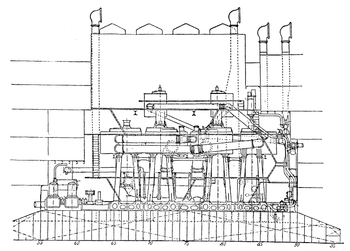 Schéma de la machine à vapeur du Deutschland ; les traits horizontaux représentent les ponts et donnent une idée de la taille de l'ensemble.
Schéma de la machine à vapeur du Deutschland ; les traits horizontaux représentent les ponts et donnent une idée de la taille de l'ensemble.
Ce système est le plus ancien. Il se caractérise par sa division en deux parties : la chaudière produit de l'énergie en chauffant de l'eau en vapeur grâce au combustible ; le moteur transforme cette énergie calorique en travail mécanique.
- Les chaudières sont constituées d'un corps étanche, parcouru par des tubes de chauffe où circule le liquide à chauffer, qui entoure un foyer où a lieu la combustion. Les premiers modèles créés sont assez simples du fait des limitations de la métallurgie de l'époque, les tubes de chauffe sont en cuivre et les pressions internes très faibles. L'utilisation de l'acier permettra par la suite d'augmenter très fortement le rendement en augmentant les pressions en jeu et récupérant la plus grande partie de l'énergie crée, par des techniques très raffinées. À la fin du XIXe siècle, le charbon commence à céder la place au mazout en tant que combustible, ce qui permet de diminuer la main d'œuvre nécessaire au fonctionnement, en supprimant les hordes de chauffeurs qui alimentaient les chaudières à la pelle et de simplifier le stockage du combustible, maintenant liquide. L'apogée de cette technologie survient dans les années 1920. Après la Seconde Guerre mondiale, elles furent définitivement supplantées du fait de leur rendement inférieur, mais leur fonction de production de vapeur se retrouva alors dans les réacteurs nucléaires qui présentent l'avantage d'utiliser un carburant quasiment inépuisable ; voir l'article Énergie nucléaire.
 Chaudières du HMS Warrior
Chaudières du HMS Warrior Chaudière du HMS Warrior
Chaudière du HMS Warrior- Le moteur peut être une machine à vapeur ou une turbine à vapeur.
1. La machine à vapeur est une machine alternative. La détente de la vapeur est utilisée dans des cylindres, en poussant un piston ; ce mouvement rectiligne était alors transformé en une rotation par l'intermédiaire d'une bielle, qui agissait sur un arbre. La métallurgie progressant et la pression des vapeurs produites augmentant, on fit passer alors la vapeur par plusieurs détentes, dans plusieurs cylindres successifs, donnant naissance aux machines à double, puis triple expansion.
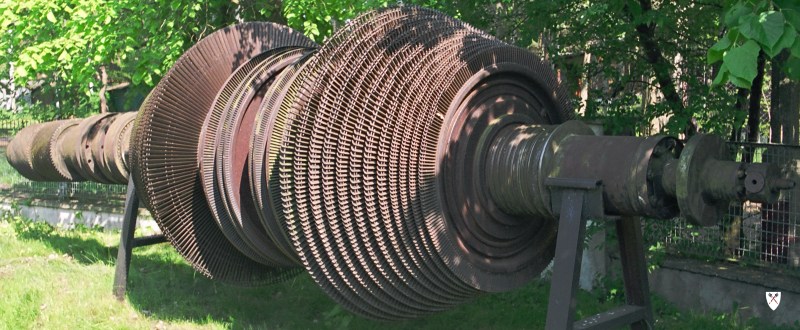
 Rotor d'une turbine Parsons, provenant du destroyer polonais ORP Wicher II
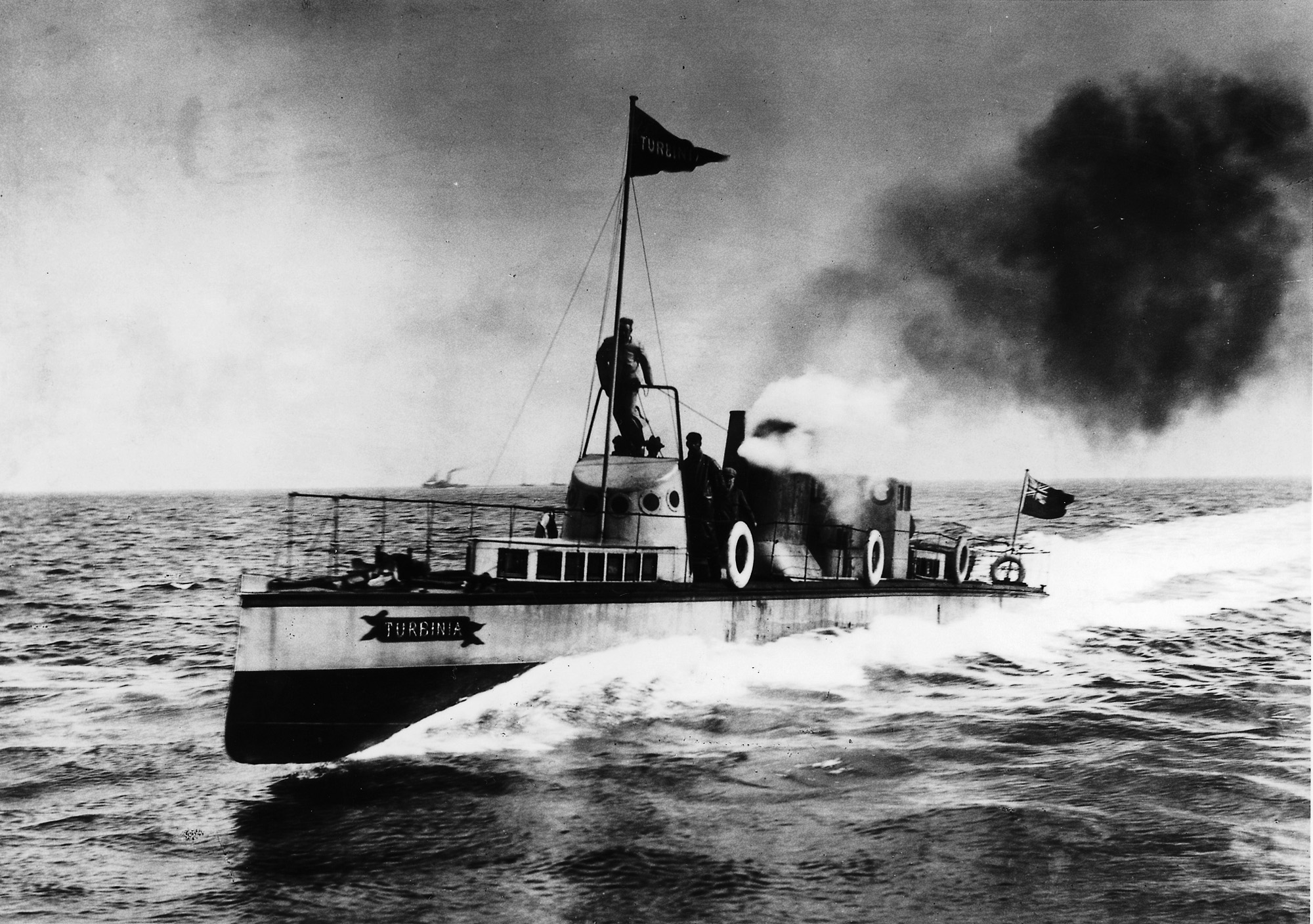
Rotor d'une turbine Parsons, provenant du destroyer polonais ORP Wicher II2. La turbine à vapeur est une machine rotative qui permit une utilisation plus souple et efficace de la vapeur, le mouvement circulaire supprimant beaucoup de pertes par frottement mécanique et permettant d'atteindre plus facilement des vitesses de rotation supérieures. À l'aube du XXe siècle, les premiers travaux furent réalisés par le britannique Charles Algernon Parsons et déboucha sur le navire expérimental Turbinia, qui atteignit 34 nœuds en 1897. Comme la machine à vapeur, on perfectionna de façon très poussée l'utilisation maximale de la vapeur par l'utilisation de groupe de turbines, travaillant dans des gammes de pressions décroissantes et entraînant le même arbre. L'usage des turbines finit par remplacer totalement les machines à vapeur à piston, entre les deux guerres mondiales.
Les systèmes à combustion externe permettent d'atteindre de grandes puissances (70 MW) avec des carburants de basse qualité, mais avec une grande consommation (380 kg/MWh) et une faible efficacité thermique. Ils sont aussi très longs à mettre en route (4 h) et demandent beaucoup d'espace. Ils sont encore typiquement utilisés pour des applications spécialisées : sur les bâtiments militaires en utilisant l'énergie nucléaire pour une meilleure autonomie, et sur les transporteurs de gaz liquéfié où il est possible de réutiliser le gaz des soutes.
Combustion interne : le moteur à combustion interne
Articles détaillés : Moteur Diesel et Turbine à gaz. Un moteur Diesel en train d'être installé sur le USCGC Bertholf.
Un moteur Diesel en train d'être installé sur le USCGC Bertholf.Issu des travaux de François Isaac de Rivaz, puis de Rudolf Diesel, le moteur à combustion interne finit par atteindre des puissances acceptables pour son utilisation navale, avant la Première Guerre mondiale. Sauf pour les plus petits bateaux, ils sont de type Diesel. Ils permettent des rendements importants, et par là une consommation moindre, mais nécessitent des carburants moins grossiers, faisant appel au raffinage des produits pétroliers. On distingue :
- Le moteur diesel deux-temps : C'est l'application la plus courante sur les navires marchands à partir de 100 m de long. Ces moteurs peuvent fournir une grande puissance (80 MW). Leur consommation spécifique (170 kg/MWh) est la plus faible de celle des moteurs thermiques, ceci venant du cycle diesel deux temps, du faible régime et des effets d'échelle (fort volume, faible surface de frottement). Ils tournent entre 80 et 180 tours par minute, permettant un entraînement direct du propulseur. Ils peuvent aussi utiliser des carburants de basse qualité. En revanche, ils occupent une place importante (celle d'une petite maison). Leur rapport poids/puissance est de l'ordre de 30 à 45 kg/kW ; leur masse élevée demande du temps pour monter en température (2h).
- Le moteur diesel quatre-temps : Il tourne à vitesse intermédiaire (400-800 tr/min) ou élevée (> 1000 tr/min) et nécessite un réducteur pour diminuer le régime (la vitesse de rotation) de l'hélice. Il offre une plus grande flexibilité mais est moins efficace qu'un moteur deux-temps et consomme plus (220 kg/MWh). Sa taille plus petite permet l'implantation de plusieurs moteurs, ce qui est utile pour assurer une certaine redondance et mieux gérer les pannes. Ces moteurs sont aussi utilisés pour la production électrique sur la plupart des navires (groupe électrogène). La puissance maximale par moteur est de l'ordre de 28 MW. Le rapport poids/puissance d'un diesel semi-rapide est de 12 à 18 kg/kW, et de 2,5 à 4 kg/kW pour un diesel rapide.
 Turbine à gaz.
Turbine à gaz.Après la Seconde Guerre mondiale, les turbines à gaz dérivées des réacteurs d'avion s'ajoutèrent à la liste. Il s'agit en général de turbines aéronautiques "marinisées" (ajout d'une arbre et matériaux résistants à la corrosion). Elles peuvent procurer une grande puissance (jusqu'à 43 MW) pour une faible masse (rapport poids/puissance d'approximativement 1,2 à 4 kg/kW) et permettent aussi des temps de démarrage extrêmement courts, de l'ordre de deux minutes, d'où leur application fréquente sur les navires militaires pour des accélérations rapides. A cause d'un débit d'air très important, les turbines demandent des gaines de passage d'air d'admission et d'échappement de grandes dimensions. Elles sont surtout très coûteuses à l'achat et en exploitation car elles consomment plus (250 à 300 kg/MWh) et exigent un carburant de très bonne qualité.

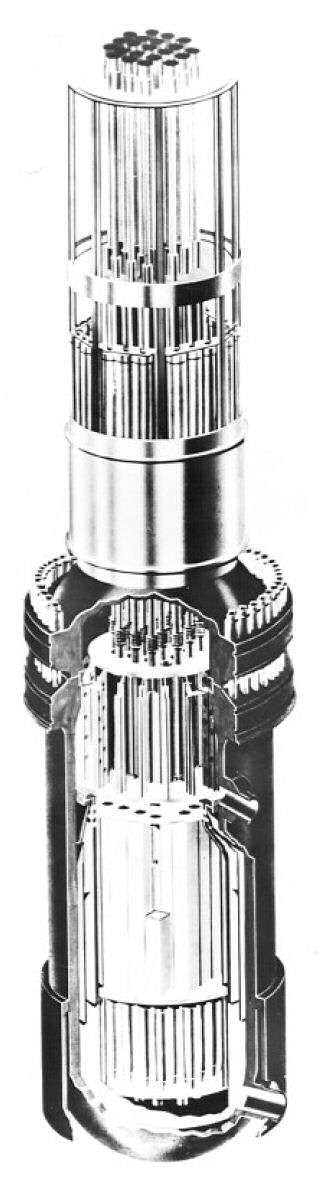
 Le brise-glaces russe à propulsion nucléaire NS 50 Let Pobedy ("Les 50 ans de la victoire") mis en service en 2007, est le plus gros brise-glaces du monde.
Le brise-glaces russe à propulsion nucléaire NS 50 Let Pobedy ("Les 50 ans de la victoire") mis en service en 2007, est le plus gros brise-glaces du monde. Article détaillé : Propulsion nucléaire navale.
Article détaillé : Propulsion nucléaire navale.Les bâtiments à propulsion nucléaire utilisent un ou plusieurs réacteurs nucléaires. La chaleur produite est transmise à un fluide caloporteur utilisé pour générer de la vapeur d’eau actionnant :
- des turbines couplées aux hélices de propulsion (propulsion à vapeur);
- des turbines couplées à des alternateurs alimentant en énergie électrique tout le bâtiment, et éventuellement des moteurs électriques de propulsion (propulsion électrique).
Environ 400 navires à propulsion nucléaire existent dans le monde, très majoritairement militaires, surtout des sous-marins, mais aussi des porte-avions et des croiseurs, et quelques navires civils (brise-glaces). Des cargos nucléaires ont également été expérimentés dans les années 1960 et 1970 (l’américain NS Savannah, l’allemand Otto Hahn et le japonais Mutsu), mais leur exploitation ne s’est pas avérée rentable et, ces expériences ont été abandonnées.
Les coûts d’investissement et d’exploitation de la propulsion nucléaire ne la rendent véritablement intéressante que pour un usage militaire et particulièrement pour les sous-marins. Cette énergie apporte :
- Une très grande autonomie permettant d’éviter en opérations la contrainte du ravitaillement en combustible (retour à un port ou ravitaillement à la mer). Sur les porte-avions, l’espace libéré par l’absence de soute à combustible, permet de consacrer plus de volume au stockage du carburant et des munitions des aéronefs.
- Une propulsion totalement indépendante de l’atmosphère.
- Alors que les sous-marins classiques sont contraints de remonter en surface (ou à l’immersion périscopique en utilisant un schnorchel) pour alimenter les moteurs diesel en air (oxygène) et, ainsi recharger leurs batteries électriques, après quelques dizaines d’heures de plongée aux moteurs électriques (quelques jours pour ceux dotés de propulsion AIP), les rendant ainsi détectables et vulnérables, les sous-marins à propulsion nucléaire peuvent rester plusieurs mois en plongée, préservant ainsi leur discrétion.
- Ils peuvent également soutenir dans la durée des vitesses importantes en plongée qu’un sous-marin classique ne pourrait maintenir plus de quelques dizaines de minutes sans entièrement décharger ses batteries.
La propulsion nucléaire apporte donc aux sous-marins un avantage déterminant, au point que l’on peut qualifier les sous-marins classiques de simples submersibles.
La Transmission
L'énergie mécanique étant produite, il reste à la transmettre aux propulseurs. Historiquement la méthode utilisée était la plus simple : un arbre moteur entraînant directement l'arbre d'hélice ou de roue. Cependant la satisfaction de plusieurs besoins a pu entraîner une certaine complexité de transmission.
Boîtier inverseur/réducteur
- Désaccouplement. Un système d'embrayage est utilisé pour accoupler ou désaccoupler le moteur de la ligne d'arbre.
- Inverseur. Pour une hélice à calage fixe, on obtient la marche arrière en inversant le sens de rotation de l'arbre.
Ces deux systèmes sont généralement inclus dans le boîtier du réducteur.
- Réduction. Les moteurs peuvent avoir une vitesse de rotation trop grande pour un fonctionnement optimal du propulseur. Le réducteur comporte un système d'arbres et d'engrenages; le rapport entre le nombre de dents déterminant la différence de vitesse des deux arbres.
- boîtiers à plusieurs entrées/sorties. Cela permet à plusieurs moteurs d'entraîner un seul arbre ou inversement. On peut alors mixer différents types de moteurs pour utiliser aux mieux leurs avantages. Par exemple, les turbines à gaz sont en général combinées avec des moteurs diesel de différentes façons :
- CODAG, pour COmbined Diesel And Gas (Combinaison Diesel et gaz) : La vitesse de croisière est assurée par les moteurs diesels, plus économiques, tandis que des turbines à gaz permettent d'obtenir une puissance additionnelle pour les accélérations : utilisé sur les navires de guerre.
- COGOG, pour COmbined Gas Or Gas (Combinaison Gaz ou Gaz) : la vitesse de croisière est assurée par des turbines à gaz de grande puissance ; en cas de sprint, c'est une autre turbine qui est utilisée à la place.
- Il existe sur le même modèle des configurations CODOG ou COGAG, plus rares cependant.
Transmission mécanique
- par ligne d'arbre
- montage classique : moteur sensiblement horizontal-ligne d'arbre-hélice,
montage avec angulation en sortie de réducteur; l'arbre est incliné de 8 ou 10 degrés vers le bas.
- montage avec forte angulation ou "V-drive"; le renvoi d'angle est placé devant le moteur, l'arbre passe sous le moteur.
- par un ou deux renvois d'angle
- moteurs hors-bord (moteur à vilebrequin vertical, arbre vertical, renvoi d'angle, hélice),
- transmission Sail-drive, un ou deux renvois d'angle selon la position du moteur, vertical ou horizontal, hélice sous la coque.
- transmission Z-drive, deux renvois d'angle, embase et hélice au tableau arrière (vedettes)
- transmission Z-drive, deux renvois d'angle, hélice sous la coque. L'hélice peut éventuellement être orientée sur 360°, d'où son emploi fréquent sur les remorqueurs pour la manœuvrabilité ainsi procurée.
Transmission électrique
Dans ce cas les moteurs agissent comme générateurs d'électricité et les arbres d'hélice sont entraînés par des moteurs électriques. Cette configuration permet de placer les moteurs diesel à différents endroits du navire (par exemple pour minimiser le bruit, équilibrer le navire, mieux protéger la machine, etc. ) ; les moteurs électriques supportent mieux les variations brusques de vitesse, comme sur les brise-glaces. Le moteur électrique peut également être déporté dans un pod (nacelle) extérieur à la carène. Ce système permet, outre une orientation sur 360°, une meilleure efficacité grâce à la suppression de l'arbre d'hélice (transmission électrique), et la possibilité de placer l'hélice à l'avant du pod, ce qui augmente son efficacité.
La propulsion électrique permet aussi, grâce à l'emploi d'accumulateurs, d'utiliser la puissance de façon différée, comme c'est le cas sur les sous-marins à propulsion diesel-électrique, la propulsion électrique étant utilisée en plongée quand les diesels ne peuvent fonctionner sans apport d'oxygène.
Article détaillé : Propulsion électrique des navires.Le Propulseur
Le propulseur transforme l'énergie mécanique qu'il reçoit en poussée motrice.
Roue à aubes
 Les roues à aubes à l'arrière du Murray Princess à Mannum
Les roues à aubes à l'arrière du Murray Princess à MannumLa roue à aubes est le premier système à avoir été historiquement employé, pour la navigation fluviale ou côtière avec machine à vapeur, et pour les premiers transatlantiques. Mais la faible efficacité de la roue, son encombrement latéral, sa vulnérabilité (navires de guerre) ont entraîné son remplacement par les systèmes à hélice. Ce propulseur n'est plus utilisé que pour quelques embarcations en eaux intérieures : les ferrys du Lac Léman, par exemple.
Hélice immergée
L'hélice est actuellement le propulseur le plus employé. Dans sa forme la plus simple et la plus courante, on trouve l’hélice à pas fixe: elle tourne autour d'un axe horizontal et est placée en général à l'arrière du navire. La "vitesse totale " des pales (somme de la vitesse de rotation et de la vitesse d'avance) génère une poussée qui fait avancer le navire.
- Nombre de pales. Les hélices peuvent posséder 2 à 3 pales (petites embarcations), 4 pales (la plupart des navires de commerce) ou jusqu'à 7 ou 8 pales (sous-marins).
- Pas variable. Si le pas (le calage des pales) peut être ajusté, on parle d’hélice à pas variable. Dans ce cas le calage, c'est-à-dire l'orientation des pales, peut être ajusté afin d'assurer une efficacité optimale à des vitesses différentes. Ce système, qui présente l'inconvénient d'être assez complexe (et donc plus cher) est utilisé sur les remorqueurs et les chalutiers pour améliorer leurs performances en traction, et également sur des cargos.
- Inversion de pas. La mécanique de variation du pas permet également de sélectionner la marche avant ou la marche arrière au niveau de l'hélice et non plus au niveau de la transmission.
- Hélice à pales repliables. Utilisées sur les voiliers pour réduire la traînée de l'hélice sous voiles. Il existe aussi des hélices à mise en drapeau.
- Nombre d'hélices. Les navires à passagers doivent avoir au minimum deux propulseurs, et donc au minimum deux hélices. On parle d' hélices jumelles, quand deux hélices sont placées de part et d'autre, à l'arrière du navire. Ce système améliore la manœuvrabilité (poussée différentielle) et la flexibilité d'emploi du navire. D'autres configurations à trois ou quatre hélices sont possibles, notamment sur les grands navires militaires (porte-avions et croiseurs) et les navires de croisière.
- Hélices contra-rotatives. Quand les hélices sont placées l'une derrière l'autre hélices à contre-rotation elles tournent en sens contraire. L'hélice arrière récupère en la redressant une partie de l'énergie dissipée en rotation par l'hélice avant. Les torpilles utilisent souvent cette configuration qui est chère et complexe pour des puissances élevées. On trouve aussi des systèmes ou l'hélice arrière est libre et d'un diamètre supérieur à l'hélice avant. Dans ce cas l'hélice arrière récupère l'énergie de rotation de l'eau mise en mouvement par l'hélice motrice (dans le disque de diamètre de l'hélice motrice) et fournit une poussée supplémentaire en extrémité de pale (disque de diamètre supérieur à l'hélice motrice). Les gains de ce système sont de l'ordre de 8 %.
Hélice en tuyère
- Tuyère de traction ou tuyère Kort. Il est possible d'adjoindre une tuyère à l'hélice ; dans la plupart des cas, la tuyère est utilisée pour augmenter la force de la traction à faible vitesse (sur les remorqueurs et chalutiers). Certaines de ces tuyères permettent aussi d'orienter le flux d'eau
- Tuyère de "discrétion". Montée sur certains sous-marins, la tuyère limite les survitesses en bout de pale, ce qui retarde l'apparition de la cavitation et du bruit associé. Dans le cas des sous-marins ce type de propulseur est aussi dénommé pompe-hélice. En plus de la tuyère il existe un système d'aubes à l'entrée de la tuyère qui donne un mouvement de prérotation au flux d'eau en amont de l'hélice. Ce système permet d'augmenter le rendement du propulseur seul comparé à une hélice simple. Par contre son coût, sa masse et le rendement global du système en font un propulseur non utilisé dans la propulsion civile.
Hélices sur pods
Le pod est une nacelle installée sous la coque d’un navire.
- Moteur. Le pod peut contenir un moteur électrique qui entraîne une ou deux hélices. Le moteur est alimenté par un générateur électrique à bord du navire, qui est habituellement entraîné par un moteur diesel.
- Propulseur. Il porte le plus souvent une hélice dite "tractrice" située sur l'avant de la nacelle. Il peut présenter deux hélices, montées en tandem, une à l'avant et l'autre à l'arrière, ou bien deux hélices contrarotatives.
- Direction. La nacelle peut être fixe, mais elle est le plus souvent orientable. Le pod fixe présente un gouvernail au bord de fuite du montant qui relie la nacelle à la coque. Quand le pod peut être orienté sur 360°, il est dit "azimutal"; ce système rend ce type de navire très maniable.
Hélices de surface
Ce sont des hélices semi immergées, au profil de pale particulier pour éviter la "ventilation" du profil. Dans cette configuration l'arbre de transmission sort du tableau arrière au-dessus de l'eau; il n'y a pas de gouvernail, c'est l'orientation latérale de l'arbre porte hélice qui assure la manoeuvrabilité (poussée vectorielle). Ce système est employé sur des bateaux rapides (plus de 30 nds).
Hydrojets ou water-jets.
L'hélice est placée dans un conduit; l'eau est pompée sous la carène et expulsée au niveau du tableau arrière, à l'air libre. L'orientation du jet est contrôlée dans le plan latéral pour assurer la direction et dans le plan vertical pour obtenir l'inversion du sens de poussée (marche arrière), remplaçant ainsi le gouvernail et l'inverseur. Ce type de propulseur a d'abord été utilisé sur les petites embarcations portuaires très maniables sous la marque Schottel. Il est souvent utilisé (à partir de 25 nds) sur les navires à passagers, et c'est le système le plus utilisé à grande vitesse (plus de 30 nds) : yachts rapides, ferrys à grande vitesse (NGV), hydroptères à vocation militaire. Les hydrojets sont montés sur des engins de loisir de type jet-ski ou motomarine à la place des hélices pour des raisons de sécurité.
Propulseur type Voith-Schneider
 système de pales verticales sous la coque (Voith-Schneider)
système de pales verticales sous la coque (Voith-Schneider)Il tourne selon un axe vertical, les pales agissant comme des foils ; La capacité d'ajuster très rapidement la direction du flux d'eau rend ce système particulièrement intéressant pour les remorqueurs, mais sa complexité le handicape au bénéfice des Z-drive.
Hélices de manœuvre
Enfin, les propulseurs transversaux ou pousseurs (bow thruster et stern thruster en anglais) sont des hélices agissant dans le sens transversal dans un tunnel traversant la coque pour assister et faciliter les manœuvres des navires surtout dans la navigation fluviale et dans les approches portuaires. Ils peuvent être entraînés par moteur Diesel, mécaniquement ou par un système hydraulique, ou par un système électrique.
- Différentes hélices de manœuvre
-

Dessin des hélices verticales et horizontales du Turtle de 1775
-

Hélices doubles montées sur pods
-

Hélice et gouvernail d'un navire cargo moderne
-

Hélice en tuyère
Hélice aérienne
Les engins à très faible tirant d'eau (hydroglisseurs) et ceux qui se déplacent au-dessus de l'eau (navires à coussin d'air aéroglisseurs et à Effet de sol) font appel à des propulseurs aériens :
- hélice fixe libre ou carénée, une surface de gouverne étant disposée dans le flux,
- hélice libre ou carénée, pivotante (poussée vectorielle),
- réacteur (très rarement utilisé pour cause de rendement économique très faible, ou seulement comme appoint au décollage pour des engins à effet de sol).
Propulsion motorisée externe
Le halage animal a été progressivement remplacé par une traction mécanique pouvant être produite de différentes façons :
- par halage : des locomotives appelées « mules » tractent les navires, comme dans les écluses du canal de Panamá;
- par touage : le toueur (remorqueur) avance par traction sur une chaîne immergée (début du XXe siècle) ;
- par remorquage : le remorqueur tire la remorque avec un cordage de gros diamètre, système plus fréquent en haute mer ;
- par poussage : le remorqueur pousse la barge (en navigation fluviale).
L'avantage d'une barge non propulsée est de permettre une certaine flexibilité et plus de rentabilité dans les opérations : pendant que la barge effectue les opérations de chargement et déchargement au port (ce qui prend du temps), le remorqueur peut être libéré pour un autre déplacement. Le système remorqueur et barge est encore utilisé sur les lacs et grands fleuves, et en haute mer pour amener les plate-formes pétrolières à leur lieu de fonctionnement. Certains navires sont également transformés en fin de vie en leur retirant leur appareil propulsif devenu obsolète, et en les convertissant en barges mobiles ou fixes ; c'est le cas notamment pour certains pétroliers qui servent d'unités de stockage flottantes.
Systèmes expérimentaux
La propulsion magnétohydrodynamique est basée sur la force de Laplace : si on fait passer un courant électrique dans un corps soumis à un champ magnétique, alors ce corps est soumis à une force. Or l'eau de mer est conductrice. En théorie, il suffit donc de mettre un (gros) aimant dans un navire, puis de faire circuler un courant électrique dans l'eau soumise au champ magnétique créé, pour mettre l'eau en mouvement par rapport au navire, c'est-à-dire (symétriquement), pour mettre le navire en mouvement par rapport à l'eau. Ceci sans pièces mobiles, donc sans bruit, sans tourbillons, et sans avoir besoin de canaliser l'eau à l'intérieur du navire. Les gouvernails sont également superflus : il suffit de changer le sens du courant (ou du champ magnétique, si on utilise un électro-aimant) pour inverser la force d'un côté du navire et ainsi l'orienter. Le courant doit être en phase avec le champ magnétique, donc continu si l'aimant est permanent et fixe, mais par ailleurs de nombreuses configurations sont envisageables (notamment avec un électro-aimant). Cependant, les inconvénients ne sont pas bien maitrisés : risques électriques et magnétiques, électrolyse de l'eau de mer (perte de rendement électrique et risque de production de produits nocifs pour la vie et agressifs pour le matériel, comme le chlore et l'hydrogène), nécessité d'aimants puissants, poussées faibles par unité de surface, etc. Ce procédé reste donc expérimental. Au début des années 1990, Mitsubishi réalisa un bateau, le Yamato utilisant la propulsion MHD. Il fonctionnait grâce à des aimants supraconducteurs refroidis à l'hélium et pouvait se déplacer à 15 km/h.
La propulsion à réaction : sur un principe similaire à celui de l'avion à réaction, des bulles de gaz sont éjectées dans une tuyère ; l'expansion de fluide ainsi provoquée produit une poussée vers l'avant. Le gaz peut être produit soit par de l'air compressé, soit par réaction chimique de l'eau avec un "carburant" comme le sodium ou le lithium. Les résultats à ce jour sont peu encourageants en raison d'une très faible efficacité, du danger des produits mis en œuvre, et de la nécessité d'un système auxiliaire pour démarrer.
Sources
- Kenneth Rawson et Eric Tupper, Basic Ship Theory [détail des éditions]
- Dominique Paulet et Dominique Presles, Architecture navale, connaissance et pratique [détail des éditions]
- Prof. Anthony Molland, Ship Resistance & Propulsion, notes de cours, M.Eng Ship Science, Université de Southampton
 Portail du monde maritime
Portail du monde maritime
Catégories :- Technologie maritime
- Propulsion





















Wikimedia Foundation. 2010.