- Algorithme de Graham
-
Parcours de Graham
Le parcours de Graham est un algorithme déterminant l'enveloppe convexe d'un ensemble de points. Son principal intérêt est sa complexité algorithmique en O(n log n). Cet algorithme doit son nom à Ronald Graham, qui a publié l'algorithme original en 1972[1].
Sommaire
Algorithme
Illustration 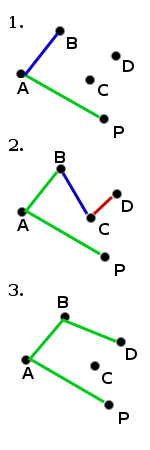
Comme on peut le voir, passer de A à B ou de B à C se fait dans le sens opposé aux aiguilles d'une montre, mais ce n'est pas le cas pour passer de C à D. L'algorithme détecte cette situation et rejette les segments précédemment choisis jusqu'à ce que le tournant pris soit dans le sens opposé aux aiguilles d'une montre (B à D dans ce cas).
La première étape de cet algorithme consiste à rechercher le point de plus petite ordonnée. S'il y a égalité entre un ou plusieurs points, l'algorithme choisit parmi eux le point de plus petite abscisse. Nommons P ce point. La complexité en temps de cette étape est en O(n), n étant le nombre de points de l'ensemble.
L'ensemble des points (P compris) est ensuite trié en fonction de l'angle que chacun d'entre eux et le point P font avec l'axe des abscisses. N'importe quel algorithme de tri convient pour cela, par exemple le tri par tas (qui a une complexité de O(n log n)). Dans le but d'accélérer les calculs, on peut se dispenser de calculer l'angle réel que ces points font avec l'axe des abscisses. Il suffit en effet de calculer la tangente de cet angle, ce qui est réalisable par arithmétique simple. À l'issue de cette étape, on dispose d'un tableau T contenant les points ainsi triés.
L'algorithme considère ensuite successivement les séquences de trois points contigus dans le tableau T, vus comme deux couples successifs. Pour chacun de ces paires de couples, il décide si passer du premier couple au second constitue un « tournant à gauche » ou un « tournant à droite ». Si c'est un « tournant à droite », cela signifie que l'avant dernier point considéré (le deuxième des trois) ne fait pas partie de l'enveloppe convexe, et qu'il doit être rejeté de T. Cette analyse se répète ensuite, tant que l'ensemble des trois derniers points est un « tournant à droite ». Dès que l'on rencontre un « tournant à gauche », l'algorithme passe au point suivant de T. (Si l'on rencontre trois points colinéaires, à quelque étape que ce soit, on peut choisir de conserver ou de rejeter le point considéré, au choix, suivant la définition que l'on choisit pour l'enveloppe convexe : en effet certaines applications requièrent que tous les points sur l'enveloppe soient compris dans l'enveloppe).
Ici encore, déterminer si trois points constituent un « tournant à gauche » ou un « tournant à droite » ne requiert pas de calculer l'angle réel entre les deux segments, et peut être réalisé par simple arithmétique. Pour trois points (x1,y1), (x2,y2) et (x3,y3), il suffit de calculer le sens du produit vectoriel des deux vecteurs définis par les points (x1,y1), (x2,y2) et (x1,y1), (x3,y3), donné par le signe de l'expression (x2-x1)(y3-y1)-(y2-y1)(x3-x1). Si le résultat est nul, les points sont colinéaires. S'il est positif, les trois points constituent un « tournant à gauche », dans le cas contraire c'est un « tournant à droite ».
Ce processus retournera finalement au point auquel il a commencé, auquel cas l'algorithme sera terminé, et T contiendra alors les points formant l'enveloppe convexe, dans l'ordre inverse des aiguilles d'une montre.
Complexité algorithmique
Le tri des points peut se faire avec une complexité en temps en O(n log n). La complexité de la boucle principale peut sembler être O(n²), parce que l'algorithme revient en arrière à chaque point pour évaluer si l'un des points précédents est un « tournant à droite ». Mais elle est en fait en O(n), parce que chaque point n'est considéré qu'une seule fois. Ainsi, chaque point analysé ou bien termine la sous-boucle, ou bien est retiré de T et n'est donc plus jamais considéré. La complexité globale de l'algorithme est donc en O(n log n), puisque la complexité du tri domine la complexité du calcul effectif de l'enveloppe convexe.
Pseudo-code
Soit Points l'ensemble de points à examiner, sous la forme d'un tableau indexé à partir de un, et Pile une pile qui contiendra le résultat final.
Trouver le pivot P; Trier les points par angle (les points d'angle égal seront triés par rapport à leur abscisse); # Points[1] est le pivot, Points[longueur] aussi (fin du circuit) Pile.empiler(Points[1]); Pile.empiler(Points[2]); POUR i = 3 A Points.longueur TANT QUE (Pile.hauteur >= 2) ET (Produit_vectoriel(Pile.second, Pile.haut, Points[i]) <= 0) Pile.dépiler; FIN TANT QUE Pile.empiler(Points[i]); FIN POUR FONCTION Produit_vectoriel(p1, p2, p3) RENVOYER(p2.x - p1.x)*(p3.y - p1.y) - (p3.x - p1.x)*(p2.y - p1.y); FIN FONCTION
Note: pour gérer les cas dégénérés où l'enveloppe convexe a moins de trois points, un seul point devrait être entré dans la pile au départ, et si jamais la pile a moins de deux points (elle en aura au moins toujours un), alors le haut de la pile devrait être également sorti si le nouveau point est le point considéré. En d'autres termes, la condition du « tant que » devrait être :Pile.hauteur >= 2 ? Produit_vectoriel(Pile.second, Pile.haut, Points[i]<= 0 : Pile.haut == Points[i].
Notes et références
- ↑ (en) Graham, R.L. (1972). An Efficient Algorithm for Determining the Convex Hull of a Finite Planar Set. Information Processing Letters 1, 132-133
- (en) Cet article est partiellement ou en totalité issu d’une traduction de l’article de Wikipédia en anglais intitulé « Graham scan ».
Voir aussi
Liens et documents externes
- (en) Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, et Clifford Stein. Introduction to Algorithms, Deuxième édition. MIT Press et McGraw-Hill, 2001. ISBN 0-262-03293-7. Pages 949–955 de la section 33.3: Finding the convex hull.
- (en) Implémentations du parcours de Graham en C++ et en Pascal Objet
- (fr) Présentation d'algorithmes pour calculer l'envelopper convexe d'un nuage de points
 Portail de la géométrie
Portail de la géométrie Portail de l’informatique
Portail de l’informatique
Catégories : Algorithme d'infographie | Algorithmique et convexité
Wikimedia Foundation. 2010.