- Sondes Viking
-
Programme Viking
 Pour les articles homonymes, voir Viking (homonymie).
Pour les articles homonymes, voir Viking (homonymie). Décollage de Viking 1 à bord d'une fusée Titan-Centaur.
Décollage de Viking 1 à bord d'une fusée Titan-Centaur.
Le programme Viking était composé de deux missions distinctes de sondes spatiales de la NASA, Viking 1 et Viking 2. L'équipement de ces deux sondes était identique. Ces deux missions avaient pour but, chacune, de placer en orbite autour de Mars un satellite d'observation et d'y faire atterrir un module d'atterrissage. Le programme Viking fût l'une des plus ambitieuses et onéreuses mission envoyée vers Mars. On considère aujourd'hui qu'elle fût un grand succès, et que cette mission permit de constituer une des bases de données sur la planète Mars qui était toujours la plus riche jusqu'à la fin des années 1990.
Le programme Viking fût la suite, moins coûteuse, du programme Voyager vers Mars qui avait été planifié dans le cadre du programme Apollo, et qui, finalement, avait été abandonnée. Viking 1 fût lancé le 20 août 1975, et Viking 2 le 9 septembre 1975. Les deux sondes furent satellisées par un fusée Titan, équipée d'un dernier étage Centaur. Les deux sondes parvinrent sur mars en quelques mois et se posèrent. Le programme est considéré comme une réussite.
Sommaire
Historique
 Maquette du module d'atterrissage Viking (Musée de la Villette (Paris).
Maquette du module d'atterrissage Viking (Musée de la Villette (Paris).Le début du programme Viking s'inscrit dans la continuité du Programme Mariner et de ses sondes qui ont visité Mars. C'est ainsi que dès 1969, le Jet Propulsion Laboratory (JPL), responsable du programme Mariner, envisage d'effectuer un atterrissage sur le sol martien[1].
De son côté, dès 1964, la NASA envisage d'envoyer un module d'atterrissage sur Mars, ce programme a été appelé Voyager (il n'a strictement rien à voir avec le programme Voyager, qui lui avait pour objectif d'envoyer deux sondes spatiales étudier les planètes du système solaire les plus éloignées). En raison d'un coût trop élevé, le programme Voyager martien est abandonné en 1967.
Le programme Viking tel qu'il a été réalisé démarre officiellement en décembre 1968. Le centre de la NASA de Langley, à Hampton en Virginie, est désigné responsable de la gestion globale du projet et de la supervision du module d'atterrissage. Sa conception sera elle confié à une entreprise privé, Martin Marietta Aérospace à Denver dans le Colorado. Le JPL sera quant à lui responsable du satellite d'observation, du module de navigation jusqu'à Mars, de l'acquisition des données et de la gestion du programme lorsque les sondes seront parties vers la planète rouge. La réalisation du lanceur sera confiée au centre de recherche Lewis de la NASA, à Cleveland dans l'Ohio.
Difficultés budgétaires
Quand il fût présenté devant le Congrès Américain en mars 1969, le projet Viking était estimé a $364.1 million de dollars. En août de la même année, il était estimé à 606 millions avec un coût additionnel de 50 millions pour la fusée de lancement. Ces dépassements dans un contexte budgétaire sévère allaient inciter les divers acteurs du projet à arbitrer en permanence leurs dépenses.
Le 29 mai 1969 le Dr Paine (Administrateur de la Nasa) annonça que la Nasa avait alloué un budget complémentaire pour un montant de 280 millions de dollars[2]. Le système d'atterrissage proposé par les contractants entama son évaluation par les ingénieurs de Langlay afin d'identifier les modifications qui pourraient être réalisées avant que les négociations en vue de l'établissement d'un contrat définitif entre la Nasa et Martin Marietta ne débutent. Ces modifications furent documentées dans une liste d'achat qui consistait en 18 points de négociation entre les parties.
L'été 1969 fût à la fois exaltant et difficile pour le projet: Apollo 11 avait atterrit sur la Lune mais dans le même temps, le budjet de la Nasa était sévèrement réduit. Bien qu'ardent supporter du projet Viking, Thomas O. Paine, administrateur depuis le mois de mars, commença à militer pour une réduction des coûts du programme Viking dès juin 2009[3].
On chercha pendant tout le programme à inciter les contractants à réduire leur coûts de développement. Ainsi le montant final du contrat de Martin Marietta fût fixé à 299,1 million de dollars et approuvé par Paine le 20 Octobre. Les coûts supportés à ce stade par Martin Marietta furent évalués à 14,53 millions de dollars, mais le budget complémentaire alloué permettait à l'entreprise de gagner plus d'argent si le coût de développement final était d'un montant inférieur au 299,1 millions prévus. Des pénalités étaient également prévues en cas de dépassement: chaque dollar de coût non prévu devait couter 15 cents de pénalité (15%), et inversement, chaque dollar économisé rapportait à l'entreprise un bonus de 15 cents[4].
Le coût total du projet Viking fût d'environ 915 millions de dollars américains[5].
Lancement des sondes
 Lancement de Viking 2
Lancement de Viking 2À l'origine le lancement des sondes devait être effectué en 1973, mais suite à des problèmes de budget, la NASA recula de deux ans le projet. Cette décision s'avéra finalement une aubaine pour les différentes équipes techniques du programme. Finalement, c'est en 1975 que les deux sondes s'envolent vers Mars, le 20 août pour Viking 1 et le 9 septembre pour Viking 2. Après un voyage d'un peu moins d'un an, Viking 1 se place en orbite de certification le 21 juin 1976, elle est rejointe par Viking 2 le 9 août sur son orbite de certification. Les deux modules d'atterrissage atterrissent sur Mars le 20 juillet pour Viking 1 et le 3 septembre pour Viking 2. Viking 1 fonctionnera pendant plus de six ans, jusqu'au 13 novembre 1982. Viking 2 durera un peu moins longtemps, mais continuera tout de même de fonctionner pendant un peu moins de quatre ans, jusqu'au 11 avril 1980.
Bilan final de la mission
Outre leur mission scientifique principale de détection de la présence ou non de vie sur mars, les missions Viking ont permes de fournir une imagerie complète de la surface de Mars avec une résolution de 150 à 300 mètes en moyenne, avec des zones dont la résolution est de 8 mètres. Les missions Viking nous ont fourni la plus complète vision de la planète Mars. Les volcans, les plaines de lave, les canyons immenses, les formations dues aux vent, et des preuves de la présence d'eau en surface sont démontrées par les images des modules orbitaux. La mission Viking a également permis de fournir des photographies précises de ses satellites.
Les modules de surface ont fournis pour leur part des images de la surface, on prélevé et analysé pour la première fois des échantillons, étudiés le climat, la composition atmosphérique et la sismicité de la planète. Ces deux modules ont également fourni près de 1400 images de leurs deux sites d'atterrissage.
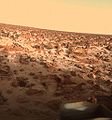
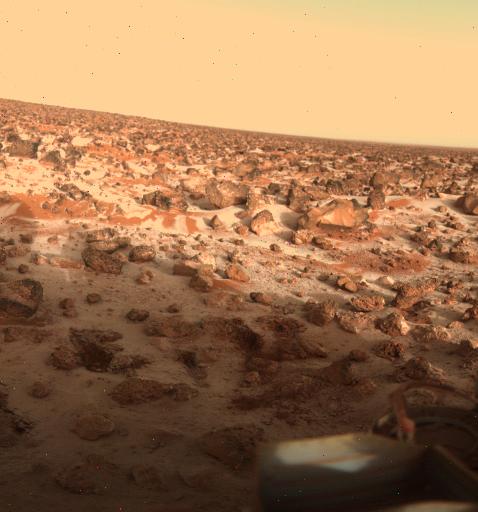
Preuve de présence de glace sur Utopia Planitia; photo prise par le module de surface de Viking 2
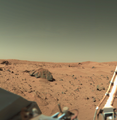
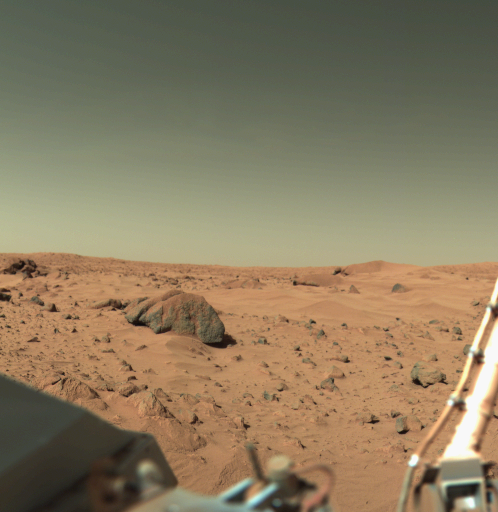
Photo prise par Viking Lander 1 le 11 février 1978. Le rocher situé à gauche mesure 2 mètre de large.

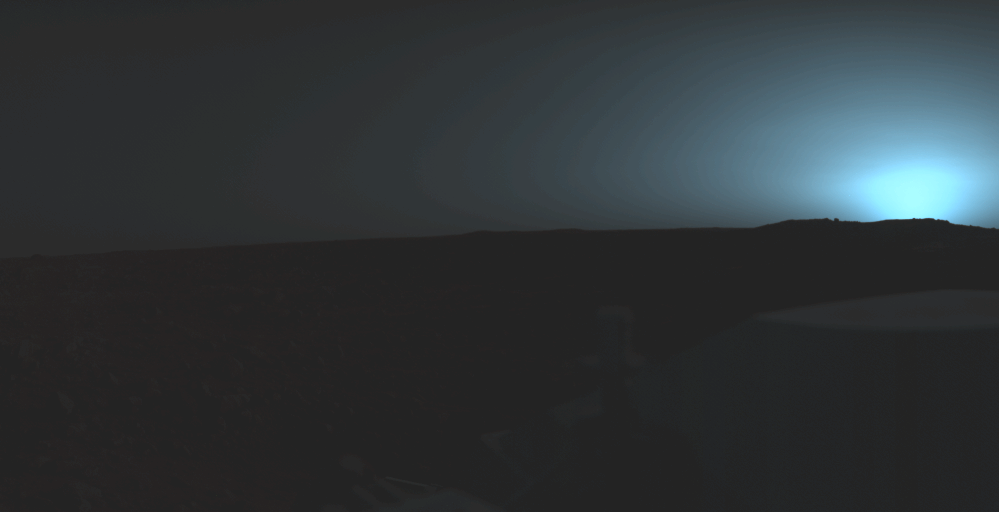
Lever de soleil martien sur Chryse Planitia par Viking 1

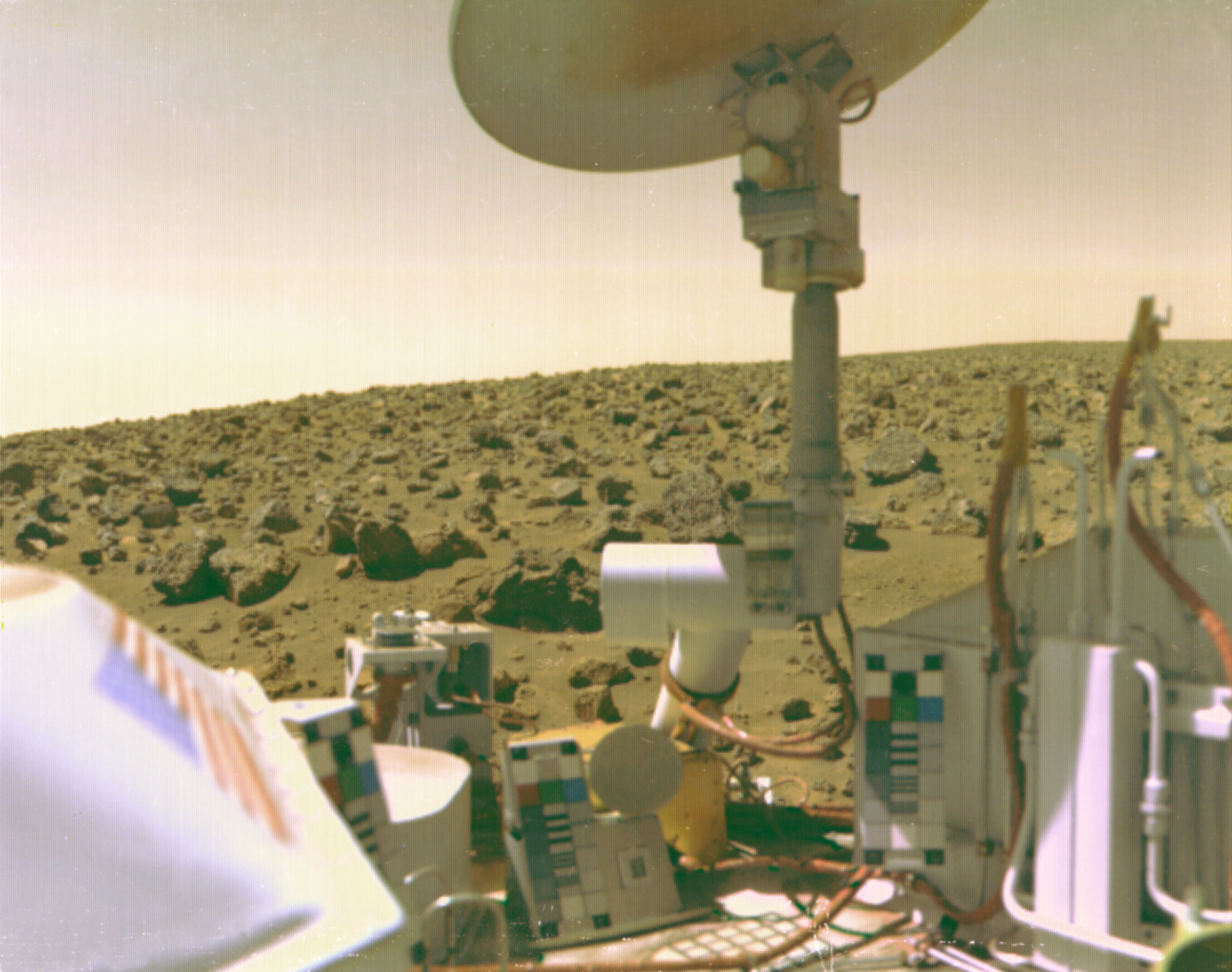
Photo prise par Viking 2 et dont le traitement des couleurs serait celui le plus représentatif de mars
Objectifs
Le projet Viking consiste en un lancement de deux vaisseaux spatiaux vers mars en vue de mener des expérimentations scientifiques. Les expériences biologiques étaient conçues pour détecter de la vie dans le sol martien. Les expériences étaient conçues par trois équipes différentes.
Chaque vaisseau était composé d'un orbiteur et d'un module d'atterrissage. Après avoir tourné autour de mars, et renvoyé les images de vérification du site d'atterrissage, l'orbiteur et le module d'atterrissage se détachaient. Le module d'atterrissage entrait dans l'atmosphère martienne et se posait sur le site sélectionné. A ce stade de la mission, les deux objectifs scientifiques du programme Viking à remplir étaient :
- pour le satellite d'observation, de cartographier le plus précisément possible le sol martien
- pour le module d'atterrissage, de détecter une éventuelle présence de vie au stade élémentaire
Le dispositif orbital
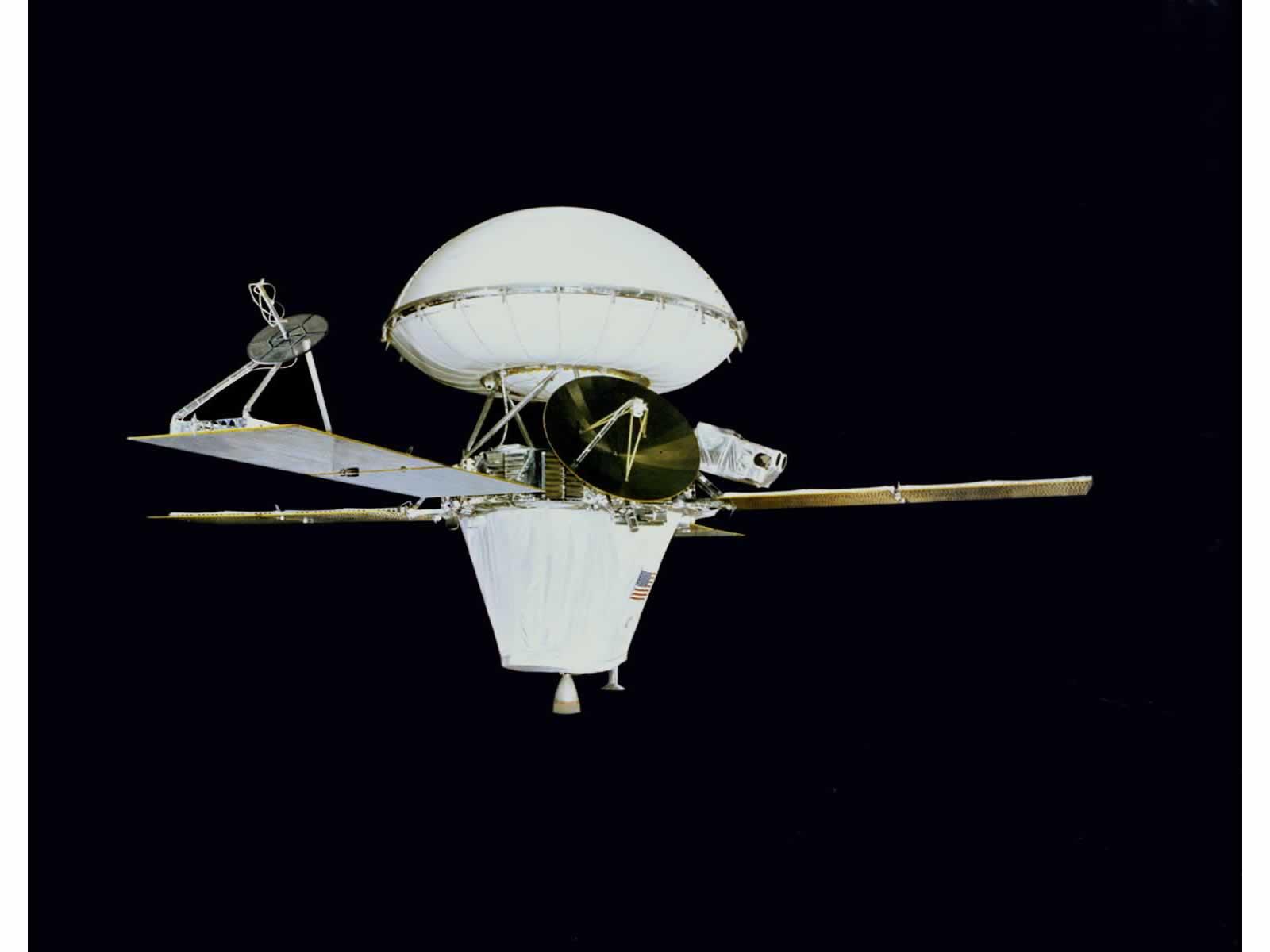
 Dispositif orbital de la mission Viking
Dispositif orbital de la mission VikingL'objectif premier des dispositifs orbitaux Viking était de transporter le vaisseau d'atterrissage sur Mars. Il devait également assurer en préambule une reconnaissance du terrain depuis l'espace, pour localiser et valider un site d'atterrissage. Il servait pour finir de relais de communication pour le vaisseau posé sur Mars, afin que ce dernier puisse transmettre ses résultats scientifiques. La conception du vaisseau orbital était basé sur celle de la précédente sonde Mariner 9.
Le vaisseau orbital était un octogone d'un diamètre d'environ 2,5 m. La masse totale au lancement était de 2328 kg, sur lesquelles 1445 étaient dévoués au propergol, ainsi qu'à un gaz utilisé pour les fusées de contrôle d'altitude. Les huit faces de la structure en année mesuraient 0.4572 m de haut et avaient une largeur alternée de 1.397 à 0.508 m. La hauteur totale du dispositif comprenant l'orbiteur et le l'atterrisseur était d'environ 3,29 m depuis les points d'attaches du vaisseau d'atterrissage, jusqu'au dessus du véhicule orbital.
L'orbiteur était équipé de 16 compartiments modulaire, 3 sur disposé sur chacune de 4 faces longues de la structure, et un sur chaque face courte. Quatre supports de panneaux solaires étaient déployés sur l'axe de l'orbiteur. La distance point à point des panneaux solaires était de 9,75m. L'énergie était produite par 8 panneaux solaires de 1.57 par 1.23 m installés par groupes de deux sur chaque support. Les panneaux solaires étaient composés de 34.800 cellules photovoltaïques, capables de produire 620 watts de puissance depuis l'orbite de Mars. L'énergie était stockée dans 2 batteries au Cadmium-Nickel de 30 ampères heures.
Le système de propulsion principal était monté au dessus du bus électrique du vaisseau. L'énergie de propulsion était fournie par une fusée à propergol liquide. Les ergols étaient le Méthylhydrazine et le Peroxyde d'azote. Les moteurs étaient montés sur cardans qui pouvaient leur fournir un angle de 9 degrés.
Le moteur était capable de fournir 1323 Newtons de poussée, ce qui permettait au vaisseau d'atteindre un Delta-v de 1480 mètres par seconde. Le contrôle d'altitude était réalisé par un ensemble de 12 petits propulseurs à jet de Peroxyde d'azote compressé. Un capteur de détection de position du Soleil, un capteur de déplacement du Soleil, un traceur de position de l'étoile Alpha Carinae et une centrale inertielle composée de six gyroscopes permettait une orientation et une stabilisation sur trois axes. Trois accéléromètres étaient également embarqués.
Les communications étaient assurées par un émetteur de 20 watts, sur Bande S à 2.3 gigahertz et deux Tube à ondes progressives. Une voie descendante en bande X à 8,4 gigahertz fût ajoutée pour des expérimentations de communications radio. La voie montante utilisait un récepteur en bande X sur la Bande S (8,4 gigahertz). Une antenne parabolique à fort gain sur deux axes orientables d'un diamètre d'approximativement 1,5m était attachée sur l'un des bords de la base de l'orbiteur. Une autre antenne à faible gain était attachée au sommet du support. Deux enregistreurs à bande magnétiques, d'une capacité de 1280 megabits chacun servaient à l'archivage temporaire des données. Un relais radio à 381 mhz était également installé.
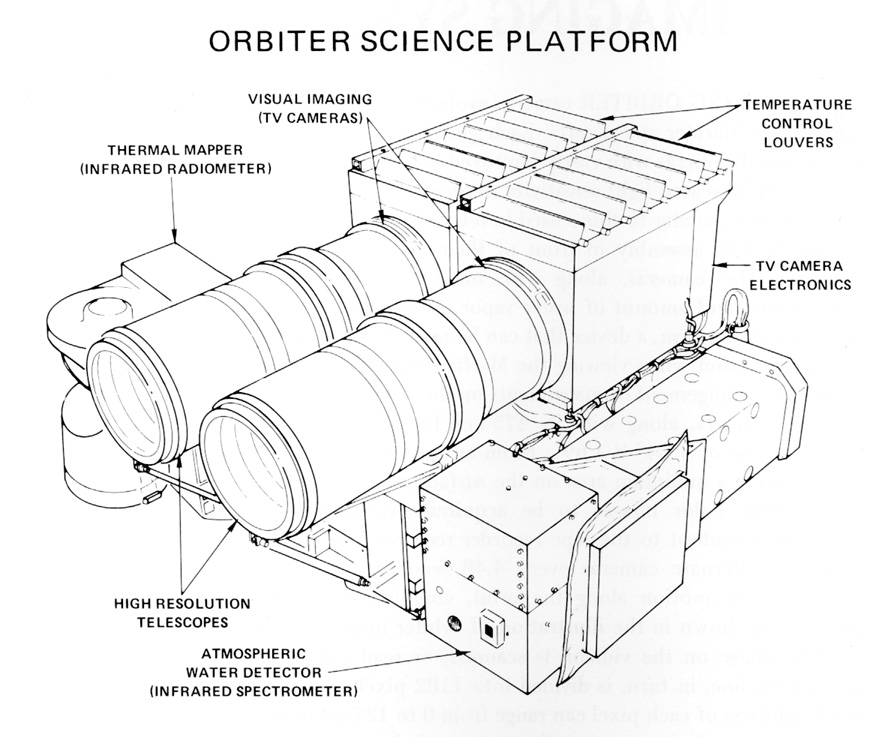
Plateforme scientifique du module orbital
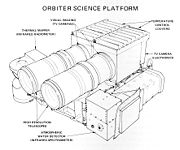 Plateforme scientifique du module orbital avec ses deux téléscopes situés devant les systèmes d'acquisition vidéo, de mesure thermique et de détection d'eau dans l'atmosphère
Plateforme scientifique du module orbital avec ses deux téléscopes situés devant les systèmes d'acquisition vidéo, de mesure thermique et de détection d'eau dans l'atmosphèreLa plateforme d'équipement scientifique du module orbital était équipée pour conduire des expériences de prises de vue de mars, de mesure de vapeur d'eau dans l'atmosphère et de cartographie infra-rouge. Les équipements nécessaires étaient contenus dans un réceptacle orientable dont la température était régulée, situé à la base du module orbitale. Les instruments scientifiques pesaient environ 72 kg[6]. Les expériences scientifiques de nature radiologique étaient menées avec les éléments de transmission de l'orbiteur.
Caractéristiques des caméras
Chaque vaisseau orbital était équipé de 2 caméras. Les caméras de la sonde orbitale Viking étaient dérivés de ceux des sondes Mariner. Il s'agit de caméras vidéo noir et blanc haute performances de type vidicon, semblables à celle utilisées à l'époque dans les stuios de télévision. Elles étaient équipées d'un téléobjectif à lentille. La plateforme scientifique sur laquelle les caméras étaient montées pouvait être orientée sur 2 axes pour sélectionner avec précision la zone à observer.
Le téléobjectif était à focale de 475 mm, avec un champs de vision de 1.54° X 1.69°. Depuis une altitude de 1500 km, chaque prise de vue couvrait une surface minimum de 40 x 44 km. Six filtres pouvaient être activés, autorisant l'acquisition d'images couleurs (après assemblage de prises de vue filtrées avec les composants de couleur rouge, verte et bleue). Le temps acquisition était contraint par la vitesse de l'enregistreur à bande. Une image pouvait être acquise par chaque caméra alternativement toutes les 4,48 secondes. La résolution était de 1056 lignes horizontales, divisées en 1182 pixels chaque. La luminosité de chaque pixel pouvait être modulé sur 7 bits (127 niveaux de gris)[7].
Ordinateur de bord du module orbital
La gestion du module et le contrôle des expériences était dévolue à deux ordinateurs redondants, chacun équipé d'une mémoire de 4096 mots. Cette mémoire était dédiée à la conservation des séquences de commandes et des données acquises. Tous les événements liés au pilotage de l'orbiteur tel que manœuvres de corrections, allumages moteurs, pointages de l'antenne haut-gain et lancement d'expériences scientifiques était pris en charge par ces ordinateurs.
Les transmissions numériques étaient réalisées via l'émetteur S-Band de l'orbiteur. La vitesse de transmission variait de 8,3 à 33,3 bits par seconde pour les données de commande, et de 2000 a 16 000 bits par secondes pour les données scientifiques. Deux enregistreurs numériques a bande 8 pistes servaient à stocker les données. Les sept premières pistes étaient dédiées au stockage des images, et la huitième piste au données infra-rouge. Chaque enregistreur pouvait conserver 640 méga bits de données[8].
Le module d'atterrissage
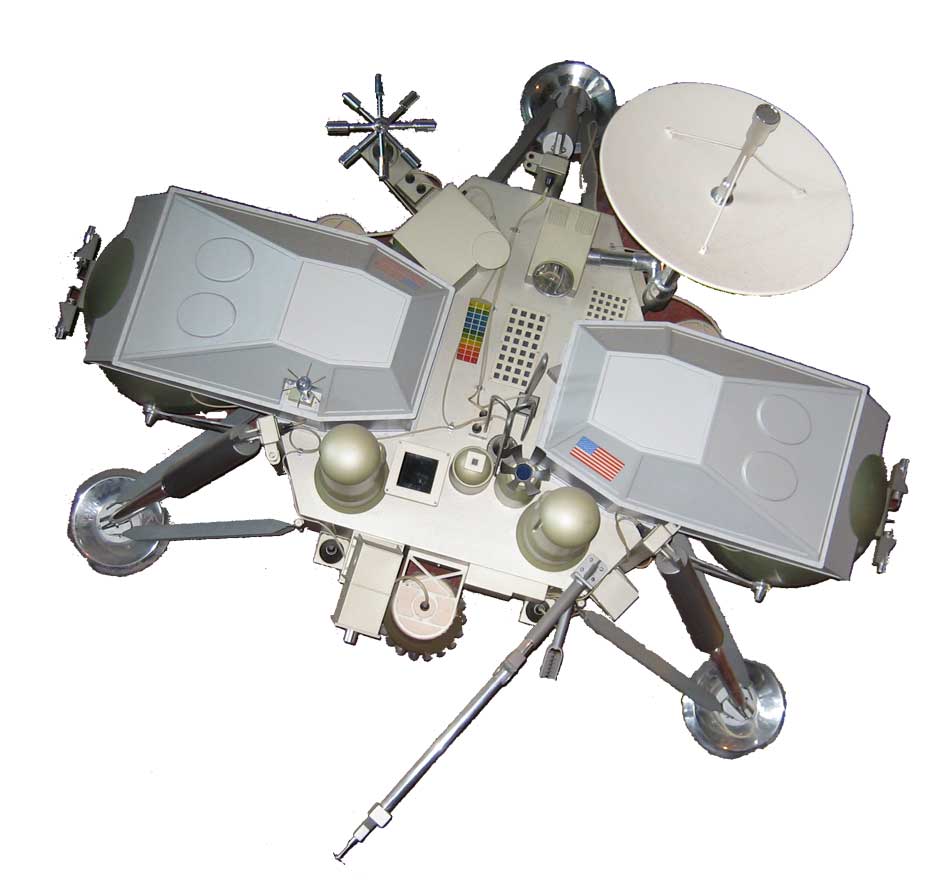
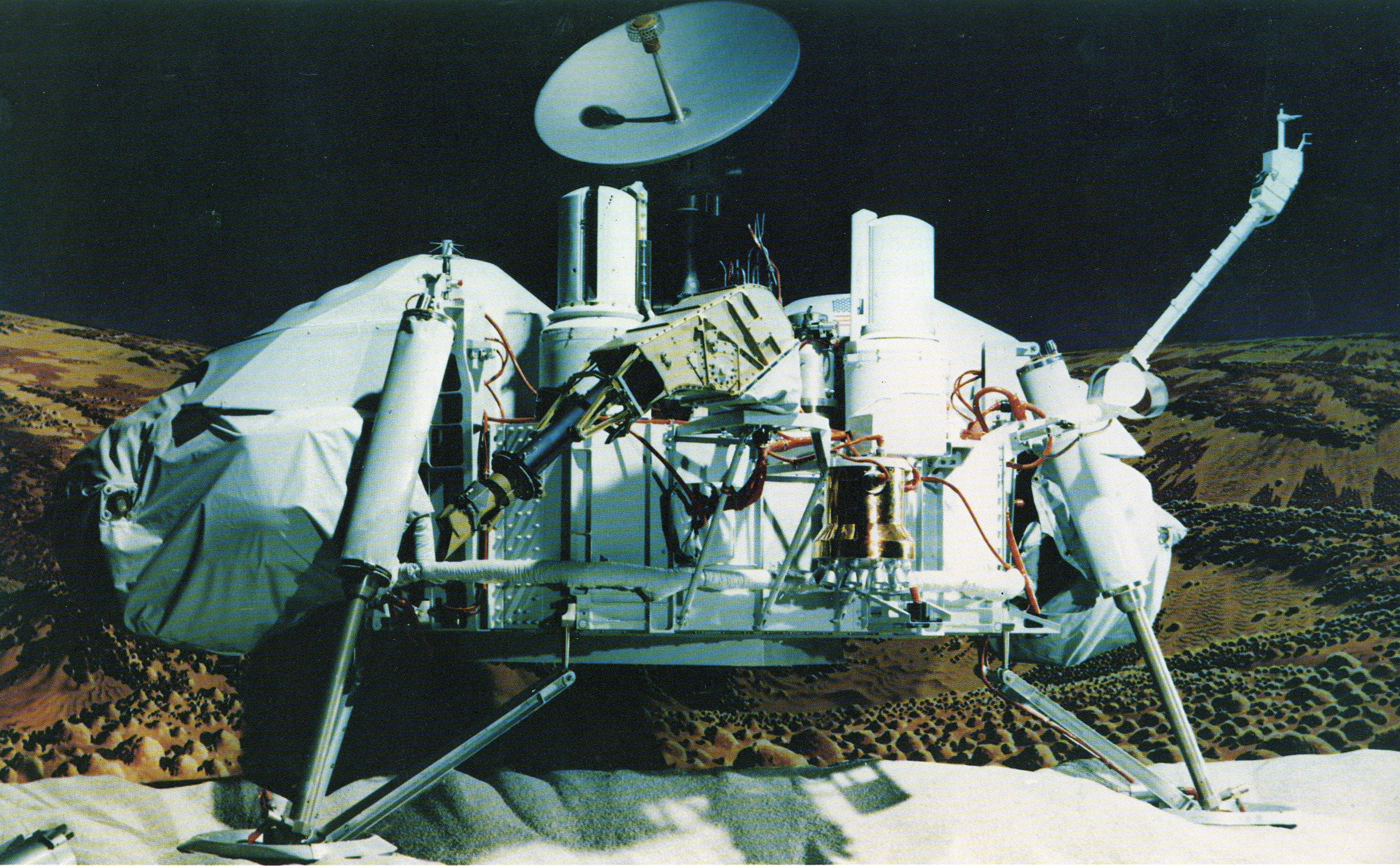
 Module d'atterrissage de la mission Viking
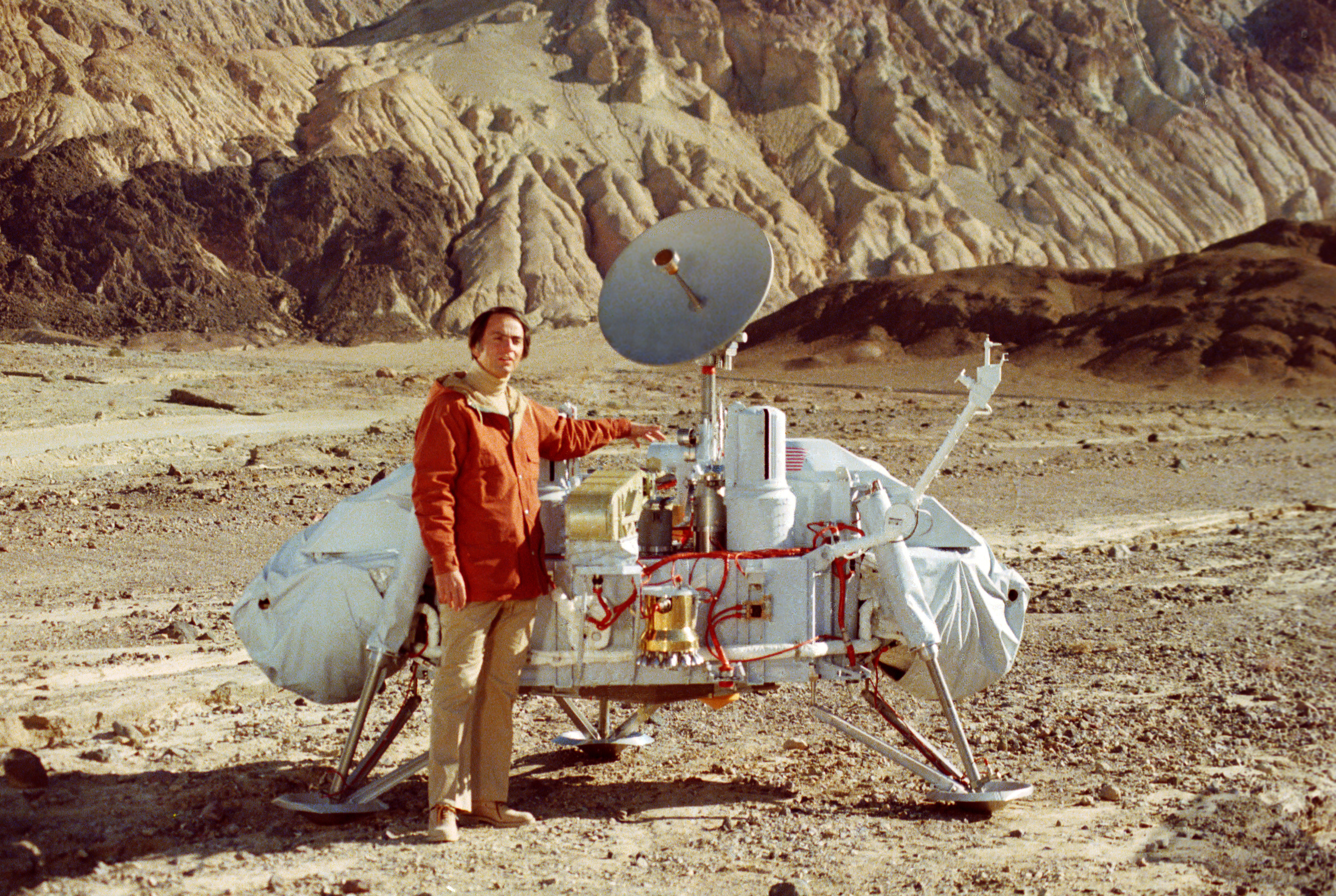
Module d'atterrissage de la mission Viking Carl Sagan aux côtés d'un modèle du module d'atterissage de Viking Lander montre l'échelle de ce dernier
Carl Sagan aux côtés d'un modèle du module d'atterissage de Viking Lander montre l'échelle de ce dernierLe module d'atterrissage[9] consiste en une structure à six pans réalisée en aluminium. Ces pans ont une longueur alternée de 1,09m et 0,56m. Ils reposent sur les trois jambes du train d'atterrissage, attachées aux côtés les plus courts. Lorsqu'on les regarde du dessus, les jambes d'atterrissages forment les côtés d'un triangle équilatéral de 2,21 m de côté. Les instruments étaient attachés au sommet de la structure du module, et surplombaient ainsi la surface du sol, une foi les jambes d'atterrissage déployées.
L'énergie électrique était fournie par deux générateur thermoélectrique à radioisotope. Ces systèmes à base de plutonium-238 utilisent des matériaux radioactifs (comme le plutonium 238), qui génèrent de la chaleur en rayonnant dans des matériaux non radioactifs. La chaleur est alors convertie en électricité par des modules thermoélectriques en utilisant l'effet thermoélectrique. Ils étaient fixés sur les face opposées de la base du module d'atterrissage, et protégés du vent par des écrans. Chaque générateur avait une taille de 28cm, 58 cm de diamètre, et une masse de 13,6 kg. Il pouvait fournir 30 watts d'énergie en continue, sous une tension de 4,4 volts. Quatre piles électriques rechargeables au cadmium-nicklel de 8 ampères/h sous une tension de 28 volts étaient également présentes afin de prévenir les baisses de puissance.
La propulsion de désorbitage était fournie par fusée fonctionnant avec un monergol à l'hydrazine(N2H4). Douze tuyères organisés par trois grappes de quatre fournissaient une poussée de 32 newtons, donnant au final un delta-V de 180 m/s. Ces tuyères étaient également utilisées en tant que propulseurs de contrôle pour assurer la translation et la rotation du vaisseau d'atterrissage. La phase de descente et d'atterrissage du vaisseau était assurée par trois propulseur à monergol d'hydrazine. Ces trois propulseurs étaient fixées sur chaque section longue de la base du vaisseau, sur un pas de 120 degrés. Chaque propulseur était équipé de 18 tuyères pour disperser les gaz éjectés et minimiser les effets au sol. La poussée de ces propulseurs était réglables de 276 N à 2667 N. L'hydrazine embarquée était préalablement purifiée pour éviter toute contamination de la surface Martienne. Le module d'atterrissage emportait 85 kg de carburant, contenus dans deux réservoirs sphériques en titane, accrochés sur les faces opposées de l'atterrisseur, au dessous des écran de protection contre le vent. La masse totale du vaisseau avec tous ces équipements était de 657 kg. Le contrôle de navigation était assuré par des centrales inertielles, 4 gyroscopes, un capteur aero-décélérateur, un altimètre radar, un radar de descente et d'atterrissage, agissant sur puissance des propulseurs de contrôle.
 Le bouclier de protection thermique du module d'atterrissage
Le bouclier de protection thermique du module d'atterrissageChaque module d'atterrissage était couvert depuis le lancement, jusqu'à la rentrée atmosphérique sur Mars, par un bouclier de protection thermique afin de ralentir le vaisseau pendant la rentrée dans l'atmosphère, mais aussi pour prévenir la contamination de la surface Martienne par une vie microbienne d'origine terrestre qui auraient pu survivre au voyage dans le vide[10]. A titre de protection anti-bactériologique complémentaire, chaque module d'atterrissage, après la phase d'assemblage et de montage sur le bouclier de protection, séjournait pendant une durée de 7 jours dans une température de 120° c. A l'issue de cette période, une protection biologique était posée par dessus le bouclier. Cette protection était larguée après que le dernier étage de la fusée Centaure chargé de lancer le système Viking ait quitté l'orbite terrestre. Ces méthodes de protection des planètes mise au point dans le cadre des missions Viking sont toujours en vigueur pour les nouvelles missions inter-planétaires[11].
Ordinateur de bord
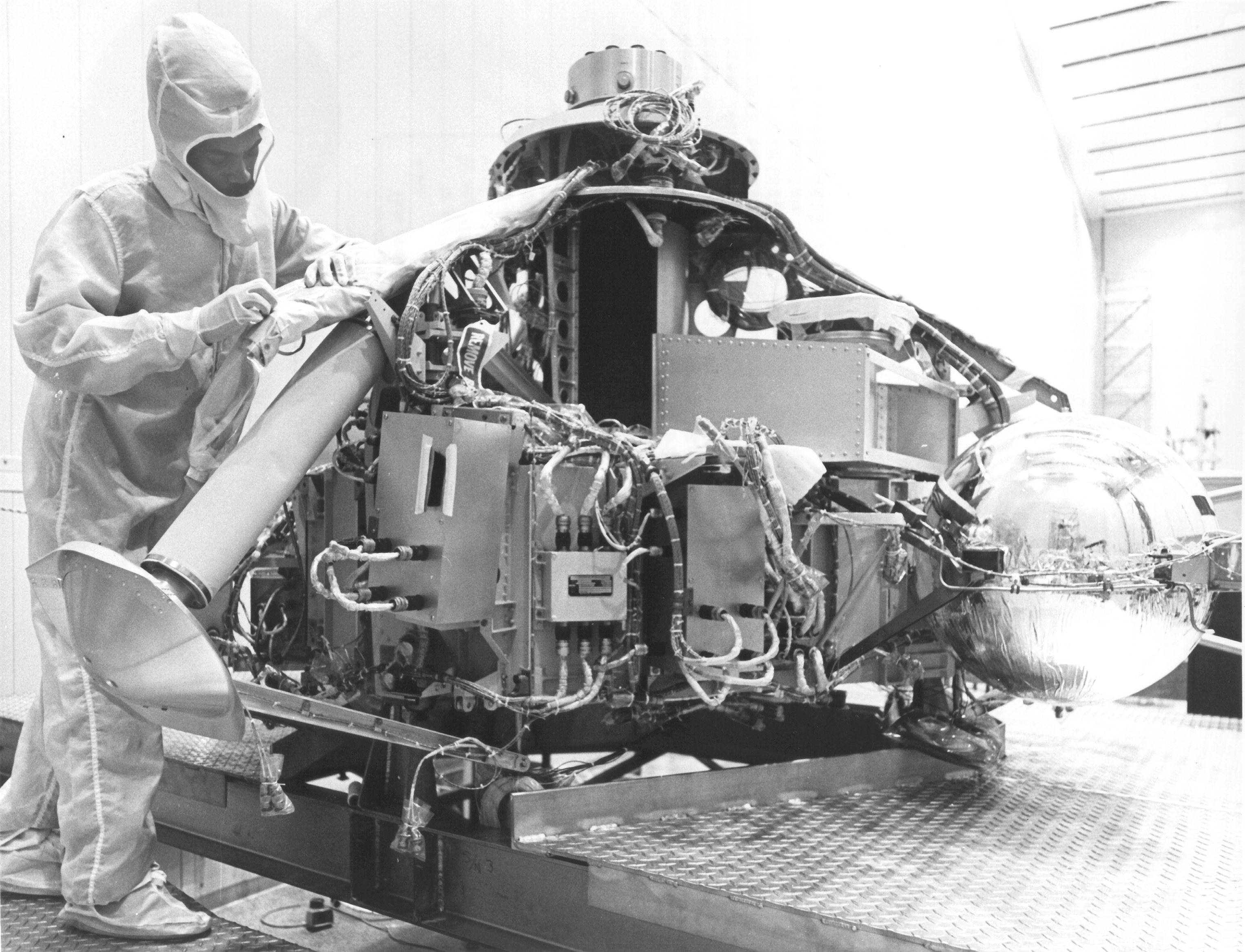
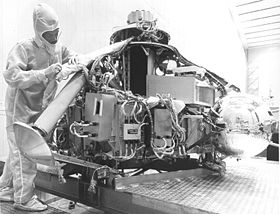 Préparation d'un module atterrisseur Viking en environnement stérile
Préparation d'un module atterrisseur Viking en environnement stérileL'intelligence du module d'atterrissage était constitué par son système de guidage et son ordinateur de gestion des tâches. Les ordinateurs de la sonde Viking était basés sur des systèmes de marque RCA Cosmac 1802 ((en) voir RCA 1802) réputé pour résister aux rayonnement spatiaux et variations de température grâce à sa technologie CMOS [12].
Cet ordinateur commandait la totalité des éléments du module d'atterrissage avec des logiciels embarqué qui pouvaient être mis à jour depuis la terre. L'élaboration de l'ordinateur de bord fût l'un des grands problèmes posé aux ingénieurs du programme. Il consistait en un système redondant (voir Tolérance aux pannes) double, équipé de mémoires à fil plaqué (voir (en) Plated wire memory de 18000 mots de capacité). Le système était prévu pour qu'un ordinateur soit en réserve pendant que l'autre était actif. Parmi les programmes contenus dans l'ordinateur, il existait un logiciel capable de gérer entièrement la mission pendant les 22 premiers jours passés sur mars, sans avoir à contacter la terre. Ce logiciel était modifié et mises à jour dès que le module d'atterrissage avait pris contact avec le centre de commande sur Terre[13].
Système de communication
Les communications transitaient par un transmetteur de 20 watts sur Bande S et deux émetteurs à Tube à ondes progressives de 20 watts. Une antenne parabolique à fort gain, orientable sur 2 axes, était montée sur une rampe près de la base de l'atterrisseur. Une antenne omnidirectionnelle a faible gain sur Bande S était également montée près de la base du module d'atterrissage. Cette antenne était utilisée pour les communications radio directe avec le centre de contrôle de la Terre. Une antenne UHF d'une puissance de 30 w et émettant sur 381 Mhz était également installée pour jouer le rôle de relais half duplex avec la sonde orbitale.
Système de stockage de données
Les données pouvaient être stockées sur un enregistreur à bande de 40 Mégabits, dans une mémoire de 8200 mots[note 1] ou expédié instantanément par l'antenne en Bande S. La mémoire était utilisée en tampon d'entrée pour des données expérimentales à stocker pendant les courtes périodes. Les données à conserver pour de longues périodes étaient transférées sur l'enregistreur à bande[14]. Le module d'atterrissage pouvait conserver ses données sur bande pour les transmettre dès qu'un module Viking orbiteur le survolait.
Instrumentation
Le module d'atterrissage transportait les instruments indispensables pour la mission première du Viking à savoir l'étude scientifique de la planète Mars. Les instruments devaient permettre l'étude de la biologie, la composition chimique organique et inorganique, la météorologie, la sismologie, les propriétés magnétiques, l'apparence et les propriétés physiques de la surface de Mars et de son atmosphère.
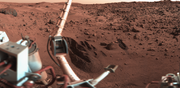
 Gros plan sur le bras de collecte d'échantillon du module d'atterissage
Gros plan sur le bras de collecte d'échantillon du module d'atterissageDeux caméras numériques cylindriques à 360° étaient montées sur le côté long de la base du vaisseau. Un bras d'expérimentation munis d'un réceptacle pour collecter les échantillons était implanté du même côté que la caméra, au centre. Une centrale météorologique avec capteur de température, de direction et vitesse du vent était située à l'extérieur du vaisseau, sur le dessus de l'une des jambes d'atterrissage. Un senseur de pression était attaché sous le corps du module d'atterrissage.
Un sismomètre, détecteur de champs magnétique, ainsi que des cibles de mise au point et de test des caméras, accompagnés d'un miroir d'agrandissement étaient situés à l'opposé des caméras, à proximité de l'antenne à fort gain. Au sein du module d'atterrissage, un compartiment dont l'environnement était contrôlé contenait les expériences biologiques et le chromatographe à gaz et spectrométrie de masse. Le spectromètre à rayons X à fluorescence était lui aussi monté à l'intérieur de la structure du véhicule. Le poids des appareillages pour l'expérimentation scientifique était d'environ 91 kg.
Déroulement de la mission
 Diagramme d'une mission Viking, du départ à la phase d'atterrissage
Diagramme d'une mission Viking, du départ à la phase d'atterrissageLes expériences de mission inter-planétaires de l'époque en étaient à cette époque à leur prémices. On avait certes posé des hommes sur la Lune, avec leurs équipements, mais de nombreuses missions automatisées avaient échouées. Le module d'atterrissage représentait l'élément principal de la mission. C'était autour de lui et de son service, qu'était architecturé toute la mission. Chaque étape de la mission pendant le voyage jouait un rôle dans l'arrivée à destination puis du fonctionnement du module parvenu à la surface. On peut schématiquement décomposer une mission Viking comme suit:
- la préparation du vaisseau, et notamment sa stérilisation, puis sa mise sur le pas de tir
- le voyage et la navigation
- la mise en orbite
- le repérage de la zone d'atterrissage par le satellite d'observation, de manière à s'assurer que la zone n'est pas encombrée par des cailloux ou trop accidentée
- la mise en orbite de certification, qui permettra de larguer le module d'atterrissage au bon endroit
- le largage du module d'atterrissage.
- la mise en route des expériences scientifiques, et la transmission des données obtenues.
Le système Viking devait être capable de réaliser une partie importante de ces étapes de manière automatisée pour de nombreuses raisons: la première étant que les communications étaient difficile sur la distance considérée. Il n'existait qu'une fenêtre de communication 20 minutes half-duplex entre la terre et mars entre le processus de séparation et jusqu'à l'atterrissage. Toute la navigation depuis l'obtention d'une référence inertielle, jusqu'à la localisation d'un point de référence sur la zone d'atterrissage, devait donc être gérée par l'ordinateur.
Une fois sur place, le vaisseau d'atterrissage ne pouvait communiquer avec la terre que durant la moitié de chaque jour martien. Les limitations électriques restreignaient encore ces possibilités de communications qui ne pouvaient finalement avoir lieu que pendant un très court laps de temps chaque jour. Il était possible au centre de contrôle de donner des instructions et reprogrammer le vaisseau sur mars, mais au final, la plupart du contrôle des opérations fût réalisée de manière autonome, au jour le jour[15].
On notera que sur les missions récentes, la phase de repérage qui était réalisée par le module Viking en orbite n'est plus nécessaire. Ainsi le programme Pathfinder n'en a pas eu besoin. Les modules d'atterrissage sont immédiatement mis sur une orbite leur permettant d'atterrir.
Missions Viking 1 et Viking 2
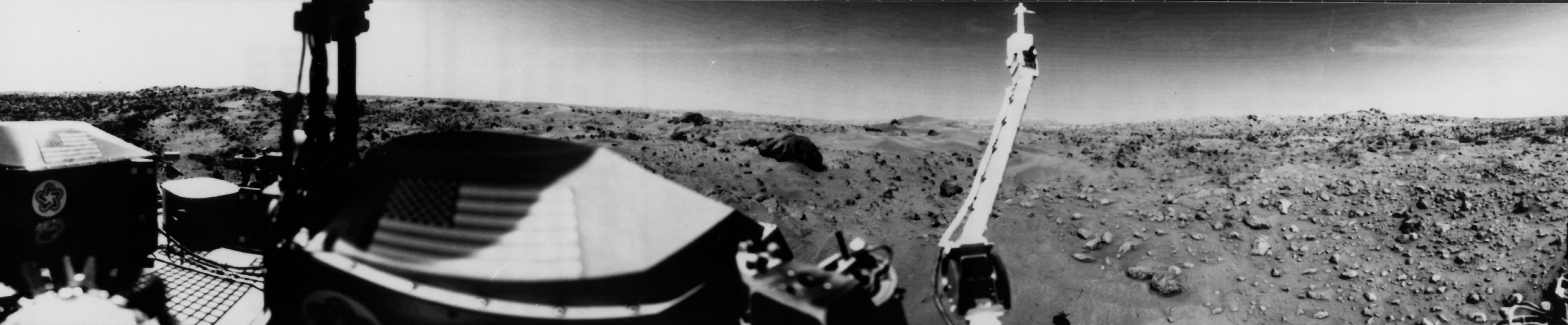
Article détaillé : Viking 1.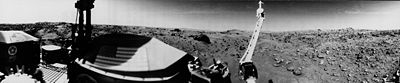 Première photo jamais prise depuis le sol de mars, par Viking 1 le 23 juillet1976
Première photo jamais prise depuis le sol de mars, par Viking 1 le 23 juillet1976Viking 1 fût lancé du Kennedy Space Center à Cap Canaveral le 20 août 1975, et arriva près de Mars le 19 juin 1976, après une navigation de 10 mois. Durant le premier mois, Viking 1 fût exclusivement utilisé depuis l'orbite pour chercher et certifier le site d'atterrissage le plus sûr. L'atterrissage initialement prévu le 4 juillet 1976 fût reporté au 20 juillet. La séparation eut lieu à 08:51 UT et l'atterissage à 11:53:06 UT, dans la zone ouest de Chryse Planitia. Il fût le premier vaisseau d'origine humaine à réaliser puis transmettre une prise de vue depuis le sol de Mars (le premier vaisseau à se poser étant Mars 3 après le crash de Mars 2).
Le 12 février 1977, l'orbite de Viking 1 fût modifiée pour permettre un survol de Phobos, la plus grande des lunes martiennes. Au plus près, le vaisseau orbital de Viking 1 survola phobos à 90 km de distance de sa surface[16].
Article détaillé : Viking 2. Viking 2 peut après son amarsissage
Viking 2 peut après son amarsissageViking 2 fût lancé le 9 septembre 1975. Après une navigation de 333 jours, il atteignit Mars le 7 août 1976. Le module d'atterrissage se sépara de l'orbiteur le 3 septembre 1976 à 22:37:50 UT et atterrit dans la zone d' Utopia Planitia. La différence principale entre l'orbite de Viking 2 et celle Viking 1 réside dans le haut degré d'inclinaison. Cette inclinaison permit à Viking 2 d'observer les régions polaires à une distance relativement proche.
Plus tard lors de sa mission, l'obiteur de Viking 2 se rapprocha de Deimos, la plus petite des 2 lunes martiennes. Il survola cette lune à une distance de 22 km seulement. Des images particulièrement spectaculaires de ce satellite fûrent prises. Viking 2 a fourni près de 16 000 images de Mars et ses satellites avant d'être éteint le 25 juillet 1978[17].
Vie de la mission
La durée d'une mission de cette nature est extrêmement variable, et très dépendante, quelques soient les objectifs initiaux, de la durée de vie des équipements et de leurs éventuelles défectuosités. La durée des éléments de Viking 1 et 2 fût la suivante:
Vaisseau Date d'arrivée Date de fin d'opération Durée de vie de la mission Cause de la fin de mission Viking 2 orbiter 7 août 1976 25 juillet 1978 1 an, 11 mois, 18 jours Extinction après un manque de propergol dans le système de propulsion. Viking 2 lander 3 septembre 1976 11 avril 1980 3 ans, 7 mois, 8 jours Défaillance de la batterie. Viking 1 orbiter 19 juin 1976 17 août 1980 4 ans, 1 mois, 19 jours Extinction après consommation de l'intégralité du propergol de contrôle d'altitude. Viking 1 lander 20 juillet 1976 13 novembre 1982 6 ans, 3 mois, 22 jours Une erreur humaine durant une mise à jour logiciel causa un dysfonctionnement de l'antenne, entrainant une fin des communications avec l'atterisseur. Bien que trois des appareils étaient hors service[18], le module d'atterrissage resta actif postérieurement au 13 novembre 1982[note 2]. Il continuait de transmettre des informations à la terre, et chaque semaine, l'équipe du JPL réceptionnait des données météorologiques, et des images de la surface de Mars face au module. Finalement, l'intégralité du programme Viking fût définitivement close le 21 mai 1983. Les deux orbiteurs Viking 1 et 2 devraient tourner autour de mars jusqu'à ce que leur orbite se dégrade et les précipite sur la planète, vers 2025[19].
Résultats scientifiques
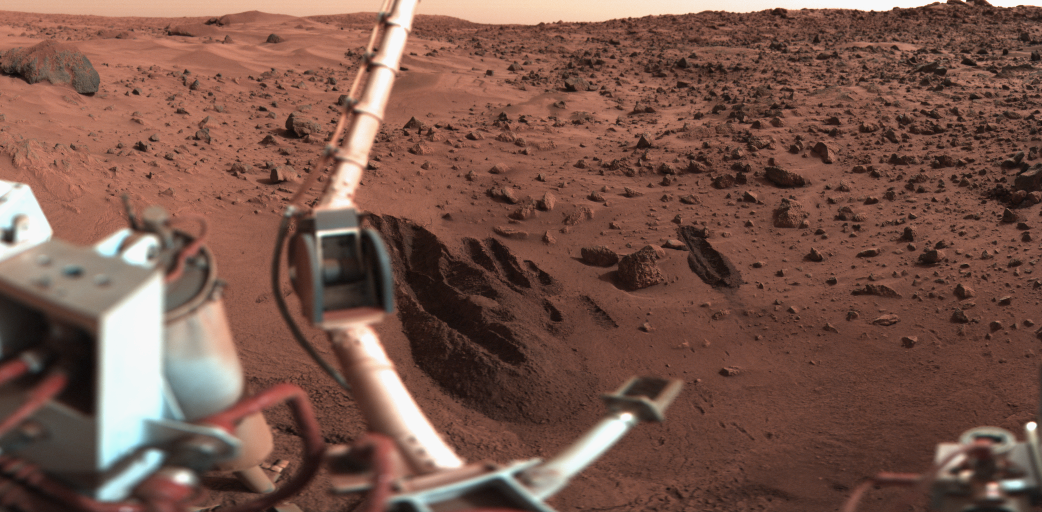
 Vue sur les tranchées creusées par le godet équipant le bras articulé de Viking 1.
Vue sur les tranchées creusées par le godet équipant le bras articulé de Viking 1.Les résultats de l'objectif initial qui étaient de détecter de la vie dans le sol de mars sont contrastés. Dans un premier temps, les résultats fûrent positif, et l'une des expérience remplit les conditions fixées par la Nasa pour affirmer que la vie avait bien été détectée. Ces premiers résultat positifs furent contredis par un second test qui ne parvint pas à révéler l'existence de molécules organiques dans le sol. La plupart des scientifiques devinrent alors convaincus que les résultats initiaux était le fruit de réactions chimiques de nature non biologique, causé par les conditions particulières d'oxydation du sol sur mars[20].
Il existe par ailleurs aujourd'hui un consensus général pour affirmer que les modules d'atterrissage Viking démontrèrent l'absence de micro-organismes robustes dans le sol des deux sites d'atterrissage. Pourtant, les résultats des tests et leur limites expérimentales sont encore l'objet de discussions. La validité du principal résultat positif repose intégralement sur l'absence d'agents oxydants dans le sol de mars. Hors, récemment, il a été découvert par le vaisseau Phoenix qu'il existait des Perchlorate de sels dans ce même sol. [21][22]. La question de la vie microbienne sur mars reste donc encore à ce jour sans réponse.
Voir aussi
Articles connexes
Liens externes
- (en) Information sur le programme Viking sur le site de la NASA
- (en) ON MARS Exploration of the Red Planet 1958-1978 Ouvrage en ligne sur le site historique de la Nasa.
- (en) Page de la mission viking sur le site de la Nasa
Liens externes multimédia
- (en) 30 ème anniversaire du programme Viking, vidéos
- (en) Galerie d'images du projet pour les 30 ans du programme par lockheedmartin
Références
- ↑ Histoire du programme Viking, livre en ligne SP-4212 On Mars: Exploration of the Red Planet. 1958-1978 sur le site historique de la Nasa
- ↑ NASA, "Viking Contract Award" news release 69-82, 29 Mai 1969
- ↑ Money problem at Nasa Livre historique de la Nasa sur le programme Viking
- ↑ David B. Ahearn, interview téléphonique par Eze11. Le 22 Nov. 1978 et audit NASA "Report on Audit of Viking Program Project Initiation to Contractor Selection. Langley Research Center, Hampton, Virginia," rpt. LR-DU: 33-70, 18 Dec. 1969, p. 17
- ↑ Table des coûts dans: On Mars: Exploration of the Red Planet. 1958-1978, SP-4212, site historique Nasa
- ↑ description de l'équipement scientifique de l'orbiteur
- ↑ The Viking Orbiter imaging system sur La documentation historique de la Nasa sur l'imageur
- ↑ Description de la mission Viking, page 3
- ↑ Description du Module d'atterrissage Viking 1 sur le site de la Nasa
- ↑ Spacecraft sterilization standards and contamination of Mars, Journal of Astronautics and Aeronautics, Carl Sagan et S Coleman, 1965, p22-27
- ↑ voir le site de la Nasa sur la protection des planètes
- ↑ (en)Informations sur les RCA Cosmac embarqués dans des sondes spatiales
- ↑ Description du système informatique page 5 du document du JPL sur le site de la Nasa
- ↑ description du JPL sur le site JPL de la Nasa, page 6
- ↑ On Mars: Exploration of the Red Planet. 1958-1978, chapitre 8, VIKING LANDER: BUILDING A COMPLEX SPACECRAFT
- ↑ NASA SP-441: VIKING ORBITER VIEWS OF MARS, Chapitre 1
- ↑ NASA SP-441: VIKING ORBITER VIEWS OF MARS, Chapitre 1
- ↑ [NASA, 'Transminer Switched Off on Viking Orbiter 1," communiqué numéro 80-129, 8 août. 1980; et JPL, "Viking Facts" du 4 août 1980]
- ↑ Section Viking sur SpaceFaq
- ↑ Journal Astrobiology, Août 2007, LUTHER W.A Concept for NASA's Mars 2016 Astrobiology Field Laboratory
- ↑ Perchlorate found in Martian soil, daté du 6 août 2008
- ↑ Life Or Not? NASA's Phoenix Team Analyzes Results, daté du 6 août 2008,
Notes
- ↑ La documentation ne précise pas la taille de ces mots, mais on sait que les imageurs produisaient des données sur 7 bits. Par ailleurs, le système de calcul embarqué Cosmac était de type 8 bits. On peut donc envisager qu'il s'agit de mots de 1 octet (soit 7 bits de données et 1 bit pour la vérification mémoire)
- ↑ Selon ce document la dernière transmission de Viking Lander 1 eut lieu le 11 novembre 1982, et les opérateurs de JPL cherchèrent à contacter le module pendant encore 6 mois et demi
Source
- (en) Cet article est partiellement ou en totalité issu d’une traduction de l’article de Wikipédia en anglais intitulé « Viking Program ».
 Portail de l’astronautique
Portail de l’astronautique Portail de l’astronomie
Portail de l’astronomie
Catégorie : Programme Viking





Wikimedia Foundation. 2010.