- Géométrie projective
-
En mathématiques, la géométrie projective est le domaine de la géométrie qui modélise les notions intuitives de perspective et d'horizon. Elle étudie les propriétés inchangées des figures par projection.
Sommaire
Considérations historiques
La géométrie projective trouve ses origines dans le travail de Pappus d'Alexandrie (IVe siècle après Jésus-Christ) qui introduit le rapport anharmonique et fait référence à un travail d'Apollonius de Perga.
Elle a ensuite été étudiée au XVIIe siècle par des mathématiciens comme Pascal ou des architectes comme Desargues au XVIIe siècle, puis théorisée et enseignée à la fin du XVIIIe siècle par Gaspard Monge qui l'enseignera à l'école polytechnique.
Poncelet, dans son Traité des propriétés géométriques des figures lui donne un véritable essor en partant de considérations de géométrie pure. En effet la géométrie affine n'aurait pas permis cette découverte puisqu'elle interdisait l'intersection des droites parallèles, notion essentielle en géométrie projective.
Par suite la géométrie pure va fortement prédominer pendant tout le XIXe siècle siècle jusqu'à ce que des méthodes analytiques soient enfin découvertes par August Ferdinand Möbius et Julius Plücker. Mais c'est Felix Klein qui, à la fin du XIXe siècle, clarifie le lien entre géométrie projective et géométrie euclidienne.
C'est aussi à la même époque qu'eut lieu une évolution conceptuelle majeure ; auparavant la géométrie était la science des figures, les géomètres du tournant du siècle se concentrèrent sur les transformations des dites figures, les lois de composition internes des diverses transformations, la structure de certains groupes de transformations (questions de la commutativité, de l'associativité, de la transformation inverse, etc.), les invariants de telle ou telle famille de transformations, les axiomes minimaux permettant ces propriétés de transformations.
Aujourd'hui certaines notions élémentaires de géométrie projective sont utilisées dans les systèmes de vision par ordinateur et de rendu graphique, tels que OpenGL.
Aperçu élémentaire
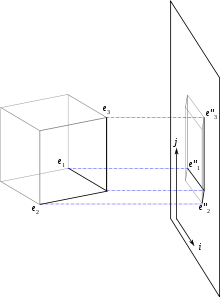 Exemple de projection orthogonale sur un plan. La géométrie projective étudie les relations entre e1, e2 et e3 qui restent identiques pour e1, e2 et e3.
Exemple de projection orthogonale sur un plan. La géométrie projective étudie les relations entre e1, e2 et e3 qui restent identiques pour e1, e2 et e3.
Pour ceux qui ne désirent qu'un aperçu élémentaire de ce qu'est la géométrie projective par rapport à la géométrie euclidienne ordinaire on peut dire que la géométrie projective est l'étude de ce qui, dans les figures, reste inchangé après projection, alors que la géométrie euclidienne est l'étude de ce qui reste invariant après déplacement (on peut la voir aussi comme la science des figures qui se tracent à la règle et au compas) ; de ce point de vue, la géométrie projective comporte moins d'axiomes que la géométrie euclidienne et par suite elle est plus générale.
La géométrie projective ignore les droites parallèles, les droites perpendiculaires, les isométries, les cercles, les triangles rectangles, isocèles, équilatéraux, etc ; on peut aussi dire, par exemple, que pour elle, cercles, ellipses et hyperboles ne constituent qu'une seule figure.
Enfin elle est remarquable par le fait qu'il est possible de poser certaines conventions de langage (par exemple appeler parallèles deux droites qui se coupent sur une droite choisie du plan) qui permettent, par la géométrie projective, de retrouver les résultats de la géométrie affine (voir ci dessous).
Espace projectif
Article détaillé : Espace projectif.Un espace projectif est défini en mathématiques comme l'ensemble des droites vectorielles d'un espace vectoriel ; on peut imaginer l'œil d'un observateur placé sur l'origine d'un espace vectoriel, et chaque élément de l'espace projectif correspond à une direction de son regard.
Un espace projectif se démarque d'un espace vectoriel par son homogénéité : on ne peut distinguer en son sein aucun point particulier comme l'origine d'un espace vectoriel. En cela il se rapproche d'un espace affine.
Définition vectorielle
Soit
 un K-espace vectoriel (K est un corps, en général
un K-espace vectoriel (K est un corps, en général  ou
ou  ), non réduit à {0}. On définit sur
), non réduit à {0}. On définit sur  la relation d'équivalence suivante :
la relation d'équivalence suivante : .
.Alors on appelle espace projectif sur
l'ensemble quotient de par la relation d'équivalence  :
:  .
.Pour chaque élément
 de on notera
de on notera  sa classe d'équivalence :
sa classe d'équivalence :  . On a donc :
. On a donc :  si et seulement si
si et seulement si  et
et  sont colinéaires.
sont colinéaires.L'application
 est appelée projection canonique.
est appelée projection canonique.Plus simplement l'espace projectif
 est l'ensemble des droites vectorielles de ; l'élément
est l'ensemble des droites vectorielles de ; l'élément  de l'espace projectif est la droite vectorielle de dont un vecteur directeur est .
de l'espace projectif est la droite vectorielle de dont un vecteur directeur est .Si
est de dimension finie  alors on dit que est de dimension finie et on note
alors on dit que est de dimension finie et on note  la dimension de l'espace projectif. En particulier :
la dimension de l'espace projectif. En particulier :- Si n=1 alors est un singleton (dimension nulle) ;
- Si n=2 alors est un plan vectoriel et est appelé droite projective.
- Si n=3 alors est appelé plan projectif ; c'est le cadre le plus courant pour faire de la géométrie.
Si l'espace
est l'espace vectoriel de dimension « typique », c'est-à-dire  alors on a une notation particulière pour l'espace projectif :
alors on a une notation particulière pour l'espace projectif :  au lieu de
au lieu de  .
.Définition affine
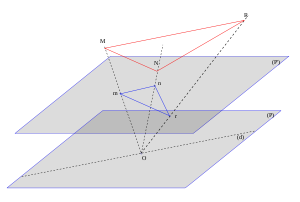 Espace projeté dans un plan projectif
Espace projeté dans un plan projectifL'aspect formel de la définition vectorielle ne doit pas faire oublier que la notion d'espace projectif est née de la projection centrale et est, avant tout, une notion géométrique. Pour prendre l'exemple de l'espace projectif de
 , on peut observer le dessin ci-contre où les points m, n et r appartiennent au plan (P'). Il faut imaginer un observateur placé en O. Cet observateur voit tous les points de la droite (OM) en m , ceux de la droite (OR) en r et ceux de la droite (ON) en n. les droites (d) du plan (P) ne sont pas vues comme des points de (P'). Il y a donc bijection entre les droites vectorielles de non parallèles à (P) et les points du plan (P').
, on peut observer le dessin ci-contre où les points m, n et r appartiennent au plan (P'). Il faut imaginer un observateur placé en O. Cet observateur voit tous les points de la droite (OM) en m , ceux de la droite (OR) en r et ceux de la droite (ON) en n. les droites (d) du plan (P) ne sont pas vues comme des points de (P'). Il y a donc bijection entre les droites vectorielles de non parallèles à (P) et les points du plan (P').L'espace projectif de
est donc en bijection avec le plan affine (P') auquel on ajoute l'ensemble des droites vectorielles de (P). Un plan projectif  est donc constitué d'un plan affine (P') qui contient l'ensemble des points propres de auquel on adjoint toutes les droites vectorielles (ou directions) de (P). Chaque point du deuxième ensemble s'appelle point impropre de ou point à l'infini.
est donc constitué d'un plan affine (P') qui contient l'ensemble des points propres de auquel on adjoint toutes les droites vectorielles (ou directions) de (P). Chaque point du deuxième ensemble s'appelle point impropre de ou point à l'infini.Cette notion permet, par exemple, de parler, dans un plan, d'intersection entre deux droites quelconques : les droites seront sécantes en un point propre de (P') ou bien en un point impropre dans le cas où les droites sont parallèles.
Cette notion se généralise à tout espace projectif
 de dimension n : c'est un espace affine (P) de dimension n auquel on adjoint l'ensemble des directions de (P).
de dimension n : c'est un espace affine (P) de dimension n auquel on adjoint l'ensemble des directions de (P).En particulier, si (P) = K, la droite projective associée est l'ensemble
 où
où  est un point extérieur à
est un point extérieur à  , prolongeant les opérations algébriques de la manière suivante :
, prolongeant les opérations algébriques de la manière suivante :- pour tout x de K,

- pour tout x de K * ,

Cette double relation, d'une part avec un espace vectoriel quotienté, d'autre part avec un espace affine complété fait la richesse de l'étude de la géométrie projective. De même, ce double aspect sera important à conserver quand il s'agira de donner des coordonnées aux points de l'espace projectif.
Définition de l'espace affine
Inversement, par l'introduction des éléments impropres (un plan impropre, en l'occurrence), Desargues a montré que l'espace affine s'inscrit dans l'espace projectif. La définition de l'espace affine est fort simple, puisqu'elle consiste en l'élimination de ces éléments impropres.
Article détaillé : Géométrie arguésienne.Repérage
Coordonnées homogènes
Article détaillé : coordonnées homogènes.Dans un espace projectif de dimension n, donc associé à un espace vectoriel de dimension n + 1, chaque point m de P(E) est associé à une famille de vecteurs de E tous colinéaires. Si E est muni d'une base canonique, on appelle coordonnées homogènes du point m, les coordonnées d'un vecteur quelconque x tels que
 . Un point possède donc une famille de coordonnées toutes proportionnelles entre elles. Autrement dit, si
. Un point possède donc une famille de coordonnées toutes proportionnelles entre elles. Autrement dit, si  est un système de coordonnées homogènes de m, il en est de même de
est un système de coordonnées homogènes de m, il en est de même de  pour tout élément k non nul de K.
pour tout élément k non nul de K.Parmi toutes ces coordonnées, il arrive souvent que l'on en privilégie une pour retrouver un espace affine de dimension n. Parmi tous les représentants de m, on privilégie, par exemple, celui dont la dernière coordonnée vaut 1. Cela revient à dire que l'on a projeté l'espace dans l'hyperplan d'équation
 . Si
. Si  est un système de coordonnées de m, on privilégie le système de coordonnées
est un système de coordonnées de m, on privilégie le système de coordonnées  . Cela ne vaut évidemment que si m est un point propre de P(E).
. Cela ne vaut évidemment que si m est un point propre de P(E).Les points impropres sont représentés par des systèmes de coordonnées homogènes dont la dernière coordonnée est nulle.
On remarque alors bien là la correspondance entre
- les point propres de P(E) et les points d'un espace affine de dimension n
- les points impropres de P(E) et les directions d'un espace vectoriel de dimension n
Choisir arbitrairement de mettre une coordonnée à 1 dans les coordonnées homogènes permet de définir des cartes différentes.
Repère d'un espace projectif
Article détaillé : repère projectif.Un espace vectoriel de dimension n se repère par une base de n vecteurs indépendants. Un espace affine de dimension n se repère à l'aide de n + 1 points non liés. Un espace projectif de dimension n se repère à l'aide de n+2 points. On pourrait penser que n+1 points seraient suffisants en prenant par exemple
 où
où  forme une base de l'espace vectoriel de dimension n+1 associé à l'espace projectif. Les coordonnées d'un point
forme une base de l'espace vectoriel de dimension n+1 associé à l'espace projectif. Les coordonnées d'un point  dans ce repère seraient alors
dans ce repère seraient alors  où sont les coordonnées de
où sont les coordonnées de  tels que mais il faudrait que ces coordonnées soient indépendantes du représentant choisi pour les vecteurs de la base :
tels que mais il faudrait que ces coordonnées soient indépendantes du représentant choisi pour les vecteurs de la base :  , par exemple, a un autre représentant qui est
, par exemple, a un autre représentant qui est  . Et dans la base
. Et dans la base  n'a pas le même système de coordonnées
n'a pas le même système de coordonnées  .
.Il faut donc empêcher cette ambiguïté et limiter le choix d'autres représentants des vecteurs de base à des vecteurs colinéaires aux précédents mais de même coefficient de colinéarité. Il suffit pour cela de définir un n+2 ième point correspondant à
 . Ainsi, si on choisit d'autres représentants de
. Ainsi, si on choisit d'autres représentants de  avec des coefficients de colinéarité différents, le vecteur
avec des coefficients de colinéarité différents, le vecteur  ne sera plus un représentant de .
ne sera plus un représentant de .Sous-espace projectif
Article détaillé : sous-espace projectif.Comme il existe des sous-espaces vectoriels d'espace vectoriel ainsi que des sous-espaces affine d'espace affine, il existe de même des sous-espaces projectifs d'espace projectif. Ils sont constitués des projetés des sous-espaces vectoriels de l'espace vectoriel associé. On parlera donc de droite projective dans un plan projectif, de plan projectif dans un espace projectif. La règle des dimensions et l'existence de points à l'infini permettent de simplifier les règles d'incidence.
Birapport sur une droite projective
Article détaillé : rapport anharmonique.Si
 ,
,  ,
,  et
et  sont quatre points distincts d'une droite projective D, il existe un unique isomorphisme
sont quatre points distincts d'une droite projective D, il existe un unique isomorphisme  de D sur
de D sur  tel que
tel queOn appelle birapport de
, , , , noté ![[a:b:c:d]\,](3/bb35a69f72c0b7509169c36addd5cd2a.png) la valeur de
la valeur de  .
.Si
, , et sont quatre points propres distincts de D, on retrouve la définition classique du birapport ou rapport anharmonique :DémonstrationL'homographie
 peut s'écrire
peut s'écrire  avec par définition
avec par définition (pôle en
(pôle en  )
)

soit encore
En prenant
 on obtient l'expression :
on obtient l'expression :
Cette définition du birapport rend aisée la preuve du résultat suivant : les homographies conservent le birapport. Plus précisément :
Invariance projective du birapport[1] — a,b,c et d sont quatre point d'une droite projective D (a, b, c distincts) et e, f, g et h quatre points sur une droite D' (e, f, g distincts) alors il existe une homographie envoyant le premier quadruplet sur le second si et seulement si les birapports [a:b:c:d] et [e:f:g:h] sont égaux.
Transformation projective ou homographie
Article détaillé : application projective.Les transformations projectives ou homographies sont des transformations étudiées en géométrie projective. Elles s'obtiennent comme composée d'un nombre fini de projections centrales. Elles décrivent ce qui arrive aux positions observées de différents objets quand l'œil de l'observateur change de place. Les transformations projectives ne conservent par toujours les distances ni les angles mais conservent les propriétés d'incidence et le birapport - deux propriétés importantes en géométrie projective. On trouve des transformations projectives sur des droites, dans des plans et dans l'espace.
Propriété fondamentale : En dimension finie, une transformation projective est entièrement déterminée par l'image d'un repère de l'espace projectif.
Définition analytique d'une homographie
Soient 2 espaces projectifs
 et
et  associés respectivement aux espaces vectoriels
associés respectivement aux espaces vectoriels  et
et  . On désigne par
. On désigne par  et
et  les projections canoniques de (resp. ) sur (resp.).
les projections canoniques de (resp. ) sur (resp.).On peut alors effectuer un « passage au quotient » des applications linéaires injectives de
dans . Une telle application linéaire  étant donnée on peut définir une application
étant donnée on peut définir une application  de dans transformant le point
de dans transformant le point  en
en  désignant un représentant de . Naturellement pour que cette définition soit cohérente, nous devons vérifier qu'elle ne dépend pas du représentant choisi, ce qui est immédiat vu la linéarité de φ et la définition de .
désignant un représentant de . Naturellement pour que cette définition soit cohérente, nous devons vérifier qu'elle ne dépend pas du représentant choisi, ce qui est immédiat vu la linéarité de φ et la définition de .- L'application est l'homographie associée à . Elle est de façon plus concise définie par l'égalité:
 .
.
On peut aussi parler plus généralement d'application projective, en n'exigeant pas l'injectivité de l'application linéaire
initiale ; le même procédé de passage au quotient fournira une application définie seulement sur une partie de :  , et à valeurs dans . On ne parlera pas alors d'homographie.
, et à valeurs dans . On ne parlera pas alors d'homographie.Il existe une infinité d'applications linéaires associées à une homographie mais ces applications linéaires forment une droite vectorielle de
 puisque
puisque  entraîne
entraîne  .
.En dimensions finies p,n, si on dispose d'un système de coordonnées homogènes, une homographie pourra être définie par une classe de matrices non nulles de format (n+1)*(p+1) toutes multiples de l'une d'elles. A étant une de ces matrices et X une matrice-colonnes de coordonnées homogènes de
, AX sera matrice colonne de coordonnées homogènes de  (tout ceci étant donc défini à un facteur près).
(tout ceci étant donc défini à un facteur près).- Exemple et discussion (géométrie plane).
- Nous prenons pour et l'espace
 .
.  est le plan projectif
est le plan projectif  . Envisageons une homographie définie par la matrice 3*3 A que nous supposons diagonalisable. On peut donc calculer les coordonnées homogènes des transformés de tout point.
. Envisageons une homographie définie par la matrice 3*3 A que nous supposons diagonalisable. On peut donc calculer les coordonnées homogènes des transformés de tout point. - Les 3 directions propres sont indépendantes et définissent 3 points invariants par de
 . Ces 3 points ont respectivement comme matrices-colonne de coordonnées homogènes X1,X2,X3 (vecteurs propres de la matrice, à un facteur non nul près).
. Ces 3 points ont respectivement comme matrices-colonne de coordonnées homogènes X1,X2,X3 (vecteurs propres de la matrice, à un facteur non nul près). - Inversement la connaissance de ces 3 points invariants détermine-t-elle l'homographie, c'est-à-dire A, à un facteur près ? Pour cela il faudrait pouvoir calculer les valeurs propres de A (à un facteur de proportionnalité près toujours). Or on n'a évidemment aucun moyen pour cela en ne connaissant que les directions propres.
- Par contre si on se donne par exemple le transformé du point de coordonnées homogènes X1 + X2 + X3 en le point de coordonnées homogènes Y, on aura en désignant par λ1,λ2,λ3 les valeurs propres de A:
 quelconque non nul, ce qui permet bien de calculer en résolvant le système les valeurs propres à un coefficient de proportionnalité près.
quelconque non nul, ce qui permet bien de calculer en résolvant le système les valeurs propres à un coefficient de proportionnalité près. - Les 4 points (les 3 points invariants plus le 4e défini ci-dessus) définissent un repère projectif (voir plus haut) et la connaissance de la transformation de ce repère projectif détermine entièrement l'homographie.
- Exemple d'homographie
- Les transformations par polaires réciproques.
Topologie
- Voir l'article détaillé : Topologie en géométrie projective.
Si E est un espace vectoriel sur
 ou
ou  de dimension finie, on peut définir sur E une topologie issue de la distance induite par la norme
de dimension finie, on peut définir sur E une topologie issue de la distance induite par la norme  dans le cas réel et
dans le cas réel et  dans le cas complexe.
dans le cas complexe.Cette topologie permet de définir sur l'espace quotient P(E) = E − 0 / ∼ une topologie, dite topologie quotient. Si
 désigne l'application de passage au quotient, on dira qu'une partie
désigne l'application de passage au quotient, on dira qu'une partie  est ouverte si son image réciproque
est ouverte si son image réciproque  est ouverte dans
est ouverte dans  . On vérifie que l'on définit bien ainsi un espace topologique
. On vérifie que l'on définit bien ainsi un espace topologiqueOn montre que
 est compact.
est compact.On munira donc l'espace projectif P(E) de cette topologie. Elle permet de parler d'homéomorphisme et de remarquer, par exemple, que la droite projective réelle est homéomorphe à un cercle, la droite projective complexe étant homéomorphe à une sphère (voir l'article sphère de Riemann pour un homéomorphisme explicite).
Dualité
Article détaillé : dualité (géométrie projective).Si E est un K-espace vectoriel de dimension finie n, son dual E* est aussi un K-espace vectoriel de dimension n. On peut donc associer à l'espace projectif P(E), son dual P(E*). Une droite de P(E*) correspondra à un faisceau d'hyperplans dans P(E). Le passage au dual permet d'inverser un grand nombre de propriétés géométriques.
Utilité
- La géométrie projective a permis de simplifier grandement des théorèmes de géométrie plane comme le théorème de Pappus ou le théorème de Desargues.
- Si l'espace projectif, comparé à l'espace usuel, c'est-à-dire l'espace affine, peut sembler être un objet plus compliqué, il est indéniable que pour de nombreuses situations, l'espace projectif est le bon cadre pour travailler. Pour donner un exemple, si C et C' sont deux courbes planes (complexes) de degré respectif d et d' alors, si on voit ces courbes comme des sous-variétés du plan affine, le théorème de Bezout dit que le nombre de points d'intersection entre C et C' est toujours inférieur ou égal à dd'. En revanche, si on voit ces courbes comme des sous-variétés du plan projectif, alors le théorème dit que le nombre de points d'intersection (comptés avec multiplicité) est égal à dd'. Il y a de nombreuses autres situations où les théorèmes s'énoncent sous un forme plus belle en géométrie projective.
- Enfin, avec le développement de la représentation en 2D d'objets en 3D, la géométrie projective a montré la puissance des outils de dessin assisté par ordinateur qui ont été mis en place.
Notes et références
- Michèle Audin, Géométrie, EDP Sciences, 2006, 3e éd. (ISBN 2-86883-883-9), p. 196
Bibliographie
- Michèle Audin, Geometry, Universitext, Springer, ISBN 978-3540434986
- Marcel Berger, Géométrie [détail des éditions] (Tome 1)
- Jean-Denis Eiden, Géométrie analytique classique, Calvage & Mounet, 2009, ISBN 978-2-91-635208-4
- De la Géométrie Projective à la Géométrie Euclidienne L'Hexagramme Mystique de Pascal
- Petite Encyclopédie de mathématique (Ed. Didier)
- Méthodes modernes en géométrie de Jean Fresnel
- D. Lehmann et R. Bkouche, Initiation à la géométrie, PUF 1988, ISBN 2 13 040160 0
- J.-C. Sidler, Géométrie projective, InterEditions 1993
- Si n=1 alors









Wikimedia Foundation. 2010.