- Projection (géométrie)
-
Projection (géométrie)
 Pour les articles homonymes, voir Projection.
Pour les articles homonymes, voir Projection.En géométrie, une projection est une transformation de l'espace, c'est-à-dire une application linéaire qui projette l'espace sur une sous partie. Par exemple pour faire de la 3D on projette l'espace (en 3D) sur l'écran (en 2D), on obtient ainsi un rendu similaire à celui que l'on aurait eu en regardant la même scène avec ses propres yeux.
Sommaire
Projection en géométrie plane
En géométrie plane, on considère une droite D du plan et une direction Δ non parallèle à D. Soit un point A du plan, alors la projection de A sur D selon Δ est le point A' = P(A) tel que :
- Si A est sur D, alors A = A' ;
- sinon :
- A' est situé sur D ;
- la droite (AA' ) est parallèle à Δ.
En géométrie euclidienne, on fait fréquemment usage d'un cas particulier de projection linéaire, la projection orthogonale : c'est le cas particulier où Δ est perpendiculaire à D. Dans ce cas-là, si A est hors de D, alors (AA') est perpendiculaire à D.
La projection est une application linéaire. Cela signifie que si A, B et C sont trois points alignés et si A', B' et C' sont leurs projetés, alors
(on oriente les droites) ou encore
et si k est un scalaire, alors
 .
.
Projections et coordonnées cartésiennes
Les droites D et Δ se coupent en O. Alors, soient A' le projeté de A sur D parallèlement à Δ, et A'' le projeté de A sur Δ parralèllement à D. On voit que
 et
et  définissent des coordonnées cartésiennes de A dans le repère (O, D, Δ), les droites D et Δ étant orientées et normées.
définissent des coordonnées cartésiennes de A dans le repère (O, D, Δ), les droites D et Δ étant orientées et normées.Projection et trigonométrie
Considérons une projection orthogonale sur D. Soient deux point A et B, et soit α l'angle
 . Alors
. AlorsProjection parallèlement à une droite en géométrie analytique
Soit
 un vecteur directeur de Δ de composantes (xu , yu ). Soit
un vecteur directeur de Δ de composantes (xu , yu ). Soit- a·x + b·y + c = 0
l'équation de D. Soit le point A de coordonnées (xA , yA ) et son projeté A' de coordonnées (xA' , yA' ).
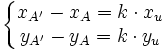
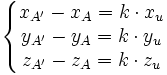
Comme (AA' ) est parallèle à Δ, il existe un scalaire k tel que
soit
Par ailleurs, A' est sur D, ce qui signifie que
- a·xA' + b·yA' + c = 0
on obtient donc
- a·(k·xu + xA ) + b·(k·yu + yA ) + c = 0
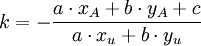
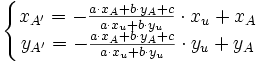
d'où
(a·xu + b·yu est non nul puisque
n'est pas colinéaire à D) d'oùsoit
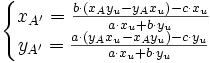
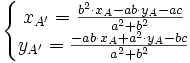
Dans le cas d'une projection orthogonale, et si le repère est orthonormé, alors on peut choisir
ce qui donne
on peut alors vérifier que si l'on prend la projection orthogonale sur l'axe Ox (qui a pour équation y = 0 soit a = c = 0 et b = 1), on a bien xA' = xA et yA' = 0.
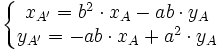
Si l'on décide arbitrairement que D contient l'origine (c = 0) et que a² + b² = 1, on obtient alors
Projection en géométrie dans l'espace
Projection sur un plan parallèlement à une droite
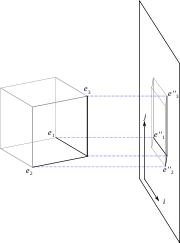 Exemple de projection orthogonale sur un plan
Exemple de projection orthogonale sur un plan
Considérons un plan Π et une droite Δ. Soit A un point de l'espace. La projection P sur Π parallèlement à Δ est définie par :
- P(A) est sur Π ;
- si A est sur Π, alors P(A) = A ;
- sinon, la droite (A, P(A)) est parallèle à Δ.
Si Δ est perpendiculaire à Π, alors la projection est dite orthogonale.
La projection est une application linéaire, on retrouve donc des propriétés de la projection en géométrie plane : si A, B et C sont trois points alignés et si A', B' et C' sont leurs projetés, alors
(on oriente les droites) ou encore
et si k est un scalaire, alors
- .
Projection sur un plan parallèlement à une droite en géométrie analytique
Soit
un vecteur directeur de Δ de composantes (xu , yu , zu ). Soit- a·x + b·y + c·z + d = 0
l'équation de Π. Soit le point A de coordonnées (xA , yA , zA ) et son projetté A' de coordonnées (xA' , yA' , zA' ).
Comme (AA' ) est parallèle à Δ, il existe un scalaire k tel que
soit
Par ailleurs, A' est sur Π, ce qui signifie que
- a·xA' + b·yA' + c·zA' + d = 0
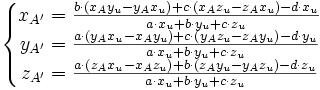
On voit que d'un point de vue analytique, le problème est très similaire au précédent. On a un système de quatre équations à quatre inconnues xA' , yA' , zA' et k. On obtient :
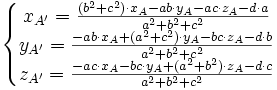
Dans le cas d'une projection orthogonale et si le repère est orthonormal, on peut choisir xu = a, yu = b et zu = c, soit
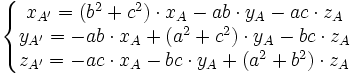
Si l'on décide arbitrairement que Π contient l'origine (d = 0) et que a² + b² + c² = 1, alors on a
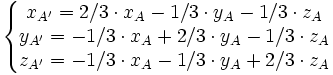
Dans le cas de la perspective isométrique, on choisit |a| = |b| = |c| = 1/√3. Par exemple, si on choisit les trois valeurs positives, on a
Projection sur une droite parallèlement à un plan
Avec les mêmes notations que ci-dessus, on peut définir la projection Q sur Δ parallèlement à Π :
- Q(A) est sur Δ ;
- si A est sur Δ, alors Q(A) = A ;
- sinon, la droite (A, Q(A)) est coplanaire à Π.
Si Δ est perpendiculaire à Π, alors la projection est dite orthogonale.
C'est toujours une applicaiton linéaire, elle a donc les propriétés énoncées ci-dessus.
Projections et coordonnées cartésiennes
Considérons trois droites D1, D2 et D3, non coplanaires et concourante en un point O. Elles sont normées et orientées.
Pour un point de l'espace A, on appelle :
- A1 le projetté de A sur D1 parallèlement au plan (D2, D3) ;
- A2 le projetté de A sur D2 parallèlement au plan (D3, D1) ;
- A3 le projetté de A sur D3 parallèlement au plan (D1, D2).
Alors, (O,D1, D2, D3) forme un repère et
 sont les coordonnées de A dans ce repère.
sont les coordonnées de A dans ce repère.Projection centrale
En géométrie projective, on considère des projections centrales. Elles décrivent ce qui arrive aux positions observées de différents objets quand l'œil de l'observateur change de place. Les transformations projectives en sont la généralisation.
Définition générale
En algèbre linéaire une projection est une application naturellement associée à une décomposition de l'espace sous forme de deux sous-espaces supplémentaires. À un vecteur de l'espace, elle associe l'un des deux éléments de sa décomposition sur ces deux espaces.
Voir l'article détaillé Projecteur (mathématiques).
À ce titre, la projection centrale n'est pas un projecteur.
En synthèse d'image 3D
Article détaillé : Rastérisation.Une projection 3D est une transformation mathématique utilisée en synthèse d'image 3D pour faire une perspective (projeter des points en trois dimensions sur un plan en deux dimensions). Elle est souvent utilisée pour simuler la relation entre une caméra et son sujet. La projection 3D est souvent la première étape dans le processus de dessin d'objets 3D sur un écran informatique, processus connu sous le nom de rendu. Les algorithmes suivants étaient très employés dans les premières simulations sur ordinateur et les jeux vidéo, et le sont toujours avec quelques grosses modifications pour chaque cas particulier. Cet article ne décrit que le cas le plus simple, le plus général.
Données nécessaires à la projection 3D
Les données utilisées pour dessiner les objets sont en général stockées sous la forme de collections de points, liés ensemble en triangles. Chaque point est une série de trois nombres, représentant les coordonnées X, Y, et Z du point, relativement a l'origine de l'objet. Chaque triangle est une série de trois points, ou trois index de points. En plus de cela, l'objet a trois coordonnées X,Y,Z, et trois valeurs représentant ses angles de rotation. Cela permet de gérer sa position et sa rotation, toutes deux relatives à un « monde ». Pour finir, l'observateur (le terme caméra est celui communément admis) : la caméra a elle aussi trois coordonnées X,Y,Z pour sa position, et trois angles pour sa rotation. Toutes ces données sont en général stockées sous forme de nombres flottants, même si beaucoup de programmes les convertissent en nombres entiers, pour accélérer les calculs.
Projection orthogonale en synthèse d'image
Voir Perspective axonométrique > Projection orthogonale en synthèse d'image.
Projection centrale en synthèse d'image 3D
Une formule simplifiée permet de calculer les coordonnées à l'écran d'un point.
2D.X = 3D.X - ((DX / (3D.Z + Distance)) * 3D.X)2D.Y = 3D.Y - ((DY / (3D.Z + Distance)) * 3D.Y)
où2D.Xet2D.Ysont les coordonnées finales projetées sur l'écran,3D.X,3D.Y, et3D.Zles coordonnées du point à projeter,Distanceune constante, etDXetDYla distance respectivement enXetYentre la caméra et le point. On écrit encore plus simplement :2D.X = 3D.X / (3D.Z * fov)2D.Y = 3D.Y / (3D.Z * fov)
Cette formule est mathématiquement incorrecte mais donne de bons résultats à moindre coût. Si
fovvaut 1, nous aurons une projection isométrique, sans notion de profondeur.Voir aussi
Articles connexes
 Portail de la géométrie
Portail de la géométrie
Catégories : Géométrie | Application linéaire



Wikimedia Foundation. 2010.