- Espace de Minkowski
-
Un espace de Minkowski, du nom de son inventeur Hermann Minkowski, est un espace affine mathématique à quatre dimensions modélisant l'espace-temps de la relativité restreinte : les propriétés physiques présentes dans cette théorie correspondent à des propriétés géométriques de cet espace, la réciproque n'étant pas vraie car le réalisme physique n'est pas entièrement contenu dans cette géométrisation[1].
La physique classique est également géométrisée, et ce depuis Isaac Newton, voire avant ; l'intérêt de cette géométrisation de la relativité restreinte est dans le fait que le temps lui-même y est représenté comme indissociablement lié à l'espace matériel, que les propriétés abstraites de la relativité restreinte y trouvent une représentation proche de la géométrie euclidienne, et que cela a aidé à la formulation de la relativité générale.
Sommaire
Historique
Cet espace a été introduit dès 1905 par Henri Poincaré, soit deux ans avant les publications de Minkowski sur ce sujet. La primeur de la découverte est un sujet à débats, mais il semble, d'après certains historiens des sciences, que l'interprétation moderne de cet espace comme espace-temps physique, et non pas convention calculatoire, est une idée de Minkowski, qui abandonna l'éther électromagnétique, à la suite d'Einstein, alors que Poincaré n'y renonça jamais vraiment, considérant que dans un référentiel quelconque les quantités mesurées sont toujours « apparentes », alors que les quantités « réelles » sont mesurées dans le référentiel de l’éther[2].
Poincaré aurait proposé cet espace comme une présentation algébrique et géométrique possible, pratique d'un point de vue calculatoire, mais axiomatique, c'est-à-dire conventionnelle, des propriétés mathématiques liées au principe de relativité et à l'invariance des équations de Maxwell par changement de référentiel inertiel, en privilégiant de manière conventionnelle comme réel le référentiel de l'éther, c'est-à-dire un espace réel qui serait classique. Seul Hermann Minkowski aurait vu dès 1907 que cet espace était un modèle expérimentable (et pas seulement conventionnel) d'un espace-temps où espace et temps sont liés dans les lois de la mécanique et y développa, entre autres, les conditions de la causalité et de la simultanéité suivant le référentiel de l'observateur. Poincaré se rapprochera de ce point de vue en 1912, dans sa dernière conférence intitulée L'espace et le temps prononcée à Londres, où il exprimera que l'on peut définir un espace-temps à partir du groupe de symétrie des lois de la physique, en posant cette fois le principe de relativité comme une convention[2].
Structure algébrique
L'espace de Minkowski étant un espace affine de dimension quatre, il est doté d'un point O (l'origine du repère) et d'un espace vectoriel de dimension quatre (sur
 ). L'espace vectoriel est doté d'une forme bilinéaire symétrique non-dégénérée, notée
). L'espace vectoriel est doté d'une forme bilinéaire symétrique non-dégénérée, notée  ou
ou  , qui n'est pas un produit scalaire car elle n'est pas définie positive (ni définie négative) : on suppose qu'il existe une base vectorielle
, qui n'est pas un produit scalaire car elle n'est pas définie positive (ni définie négative) : on suppose qu'il existe une base vectorielle  telle que
telle que  [3], où
[3], où  .
.Comme pour toute forme bilinéaire, il lui correspond une forme quadratique (qui est le carré de la pseudo-norme) :

- La matrice associée à cette forme bilinéaire, dans la base considérée ci-dessus, est
 , on a donc
, on a donc  , en écriture matricielle.
, en écriture matricielle. - L'écriture tensorielle permet d'introduire la convention de sommation d'Einstein : en définissant les « coordonnées contravariantes »
 et les « coordonnées covariantes »
et les « coordonnées covariantes »  , on écrit alors
, on écrit alors 
Dans l'espace affine, les coordonnées d'un point M sont notées
 . Il est doté d'une distance particulière[4]
. Il est doté d'une distance particulière[4]  souvent appelée pseudo-métrique, définie dans le repère
souvent appelée pseudo-métrique, définie dans le repère  par
par  . Ce que l'on note plus simplement
. Ce que l'on note plus simplement  quand il n'y a pas de risque de confusion entre cette forme bilinéaire et le produit scalaire euclidien. Dans cette écriture, le carré est conventionnel car la forme quadratique admet aussi des résultats de signe négatif, et
quand il n'y a pas de risque de confusion entre cette forme bilinéaire et le produit scalaire euclidien. Dans cette écriture, le carré est conventionnel car la forme quadratique admet aussi des résultats de signe négatif, et  n'est bien défini que si
n'est bien défini que si  .
.L'ensemble des transformations affines de l'espace de Minkowski qui laissent invariante la pseudo-métrique[5] forme un groupe nommé groupe de Poincaré dont les transformations de Lorentz forment un sous-groupe.
Géométrie
La géométrie dans l'espace de Minkowski présente un certain nombre de différences avec la géométrie dans un espace euclidien. Elle possède également des significations physiques précises.
Orthogonalité
Un espace de Minkowski possède une notion d'orthogonalité définie par la forme bilinéaire
. Deux vecteurs sont dits orthogonaux dans l'espace de Minkowski si et seulement si  .
.La notion d'orthogonalité est importante dans l'espace de Minkowski, car le complément orthogonal de la direction (tangente) d'une ligne d'univers en un point p est un « plan » tridimensionnel contenant tous les événements simultanés à l'événement p.
En effet, par définition de l'orthogonalité, le « complément orthogonal du temps propre de cette ligne d'univers » au point p est l'ensemble des événements qui, dans le référentiel galiléen tangent à la ligne d'univers, n'ont aucune composante temporelle (Δτ = 0). Ces événements se déroulent donc « au même instant » que l'événement p sur cette ligne d'univers. Cet espace tridimensionnel est nommé plan de simultanéité pour cet événement sur cette ligne d'univers.
On voit clairement qu'il n'est pas possible de prendre le complément orthogonal d'un simple point (événement) p sans lui associer sa ligne d'univers et donc sa vitesse. Cela illustre bien que - en relativité restreinte - la notion de simultanéité dépend de la vitesse.
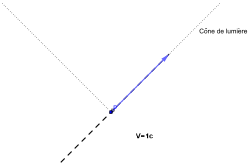
Dans la représentation qu'est un diagramme de Minkowski, l'orthogonalité minkowskienne possède une propriété que ne possède pas l'orthogonalité euclidienne : l'angle entre un vecteur et son orthogonal varie en fonction de l'inclinaison du vecteur (en géométrie euclidienne, l'angle est fixe et égal à 90°). Quand le vecteur est de « genre lumière », ce vecteur est alors son propre orthogonal : la ligne d'univers est contenue dans le plan de simultanéité. Pour un photon, le temps ne s'écoule pas quand il progresse sur sa ligne d'univers.
Détails mathématiquesDans le référentiel tangent à la ligne d'univers du mobile qui se déplace (son référentiel propre), les coordonnées du quadrivecteur de position (et non pas "de vitesse") du mobile sont
 . C'est le quadrivecteur temps propre ou encore le quadrivecteur tangent à la ligne d'univers par le fait qu'il n'indique aucune séparation spatiale avec le référentiel, tout en reflétant une évolution temporelle car
. C'est le quadrivecteur temps propre ou encore le quadrivecteur tangent à la ligne d'univers par le fait qu'il n'indique aucune séparation spatiale avec le référentiel, tout en reflétant une évolution temporelle car  (par hypothèse).
(par hypothèse).Si un quadrivecteur
 est perpendiculaire à
est perpendiculaire à  , on a :
, on a : , soit
, soit  (puisque ). Donc un point joint à l'origine de ce référentiel par un quadrivecteur
(puisque ). Donc un point joint à l'origine de ce référentiel par un quadrivecteur  orthogonal à la ligne d'univers représente un événement simultané avec celui de l'origine du référentiel (le décalage de temps est ).
orthogonal à la ligne d'univers représente un événement simultané avec celui de l'origine du référentiel (le décalage de temps est ).Comme la forme bilinéaire est invariante par changement de référentiel, l'orthogonalité est assurée quel que soit le référentiel d'où on considère les quadrivecteurs, et ainsi dans les diagrammes de Minkowski, si l'angle dessiné entre
et dépend du référentiel choisit, leur orthogonalité minkowskienne est conservée.Les calculs des carrés des pseudo-normes de
et , à l'aide des coordonnées dans le référentiel galiléen tangent, donnent :  et
et  . Donc est à l'intérieur du cône de lumière et est à l'extérieur. Par ailleurs, on sait que le carré de la pseudo-norme est conservé par changement de référentiel, donc ces caractéristiques restent vraies pour tout référentiel, et y compris dans les diagrammes de Minkowski.
. Donc est à l'intérieur du cône de lumière et est à l'extérieur. Par ailleurs, on sait que le carré de la pseudo-norme est conservé par changement de référentiel, donc ces caractéristiques restent vraies pour tout référentiel, et y compris dans les diagrammes de Minkowski.Inégalité triangulaire
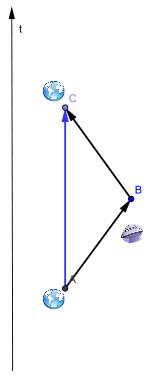 Paradoxe des jumeaux dans un espace de Minkowski
Paradoxe des jumeaux dans un espace de Minkowski
Dans un plan euclidien, l'inégalité triangulaire est la relation selon laquelle, quel que soit un triangle ABC, alors les longueur AB, BC et AC vérifient l'inégalité :
 , l'égalité ayant lieu quand les points A, B et C sont alignés. Cette inégalité signifie que dans l'espace euclidien, le trajet le plus court entre deux points est la ligne droite.
, l'égalité ayant lieu quand les points A, B et C sont alignés. Cette inégalité signifie que dans l'espace euclidien, le trajet le plus court entre deux points est la ligne droite.Dans l'espace Minkowskien, il existe un équivalent de l'inégalité triangulaire, établissant les relations entre les longueurs des côtés d'un triangle. Toutefois, celle-ci n'est cohérente que si le triangle est entièrement compris dans un cône de lumière, et si
 ,
,  et
et  sont orientés vers le futur (c'est-à-dire si le carré de leur pseudo-norme est strictement positive).
sont orientés vers le futur (c'est-à-dire si le carré de leur pseudo-norme est strictement positive).Pour un triangle ABC vérifiant ces conditions, on a alors l'inégalité dans l'espace Minkowskien :

Cette inégalité est l'inverse de celle de l'espace euclidien. Dans l'espace Minkowskien, un chemin faisant un détour (dans l'espace-temps) est toujours plus « court » (en termes d'intervalle espace-temps) que la « ligne droite ». Une « ligne droite » dans l'espace Minkowskien est la ligne d'univers d'une particule qui n'est soumise à aucune force, donc à vitesse constante ou stationnaire.
Cette propriété permet d'illustrer et d'expliquer le paradoxe des jumeaux en relativité restreinte. Le « jumeau » restant sur terre parcourt une « ligne droite » dans l'espace-temps AC. Le jumeau qui voyage parcourt deux segments de droites AB et BC (il fait demi-tour en B pour rejoindre son jumeau en C). Les lignes d'univers des deux jumeaux forment un triangle ABC, dont les côtés sont de genre temps (vitesse des jumeaux inférieure à celle de la lumière) et orientés vers le futur.
L'intervalle espace-temps du jumeau qui voyage est donc inférieur, selon l'inégalité triangulaire minkowskienne, à celui du jumeau stationnaire. Le temps propre du jumeau qui voyage est donc inférieur, et il est donc plus jeune au terme de son voyage que son jumeau resté sur Terre.
Ébauche de justification de l'inégalité triangulaire[réf. nécessaire]Plaçons-nous dans une situation physiquement réaliste : en allant de l'événement A à l'événement C par un mouvement inertiel, un observateur va en ligne droite, alors qu'un deuxième observateur va en ligne droite de A vers B puis de B vers C. Dans un référentiel inertiel (à deux dimensions pour simplifier) du premier observateur, les coordonnées des événements sont : A(0,0) , C(ct,0) et B(ct',x). Pour que le deuxième observateur puisse aller de B vers C, il faut que t>t', et autres petites précautions sur lesquelles il n'est pas utile d'insister.
Calcul des pseudo-distances :

 et
et  avec
avec  car
car 
On remarque qu'alors
 ce qui est l'inégalité triangulaire (stricte) cherchée. L'égalité a lieu pour
ce qui est l'inégalité triangulaire (stricte) cherchée. L'égalité a lieu pour  , c'est-à-dire dans le cas où les trois points sont alignés.
, c'est-à-dire dans le cas où les trois points sont alignés.Remarquons que cette justification dans une situation particulière permet de justifier le cas général : ce dernier peut toujours se ramener au précédent par un changement de référentiel (transformation de Poincaré) qui ne change pas les valeurs obtenues par la forme quadratique.
Démonstration de l'inégalité triangulaire[réf. nécessaire]On se rappelle que si
 et
et  , alors
, alors  .
.On note
 quand
quand  est un vecteur de
est un vecteur de  .
.On suppose que
 et
et  , donc on a
, donc on a  ,
,  , et,
, et,  , à partir de
, à partir de  obtenu par l’inégalité triangulaire de la norme euclidienne classique
obtenu par l’inégalité triangulaire de la norme euclidienne classique  .
.Démontrons, par une suite d'équivalences, que


par mise au carré.

Par développement et simplification.

par mise au carré.

par développement.

en utilisant
 .
.
par quelques calculs algébriques (factorisations)

Comme et
et  , on a
, on a

avec égalité pour

Remarque : on peut aussi étudier les variations de
 sur l'intervalle [-1 ; 1] et montrer que son minimum est atteint en 1.
sur l'intervalle [-1 ; 1] et montrer que son minimum est atteint en 1.or, par développement puis factorisation

Avec égalité pour
 , soit
, soit 
L'inégalité triangulaire initiale est donc vraie.
Il y a égalité uniquement pour
et , soit , donc dans le cas où les quadrivecteurs  et
et  sont proportionnels (colinéaires).Preuve algébrique de l'inégalité triangulaire[réf. nécessaire]
sont proportionnels (colinéaires).Preuve algébrique de l'inégalité triangulaire[réf. nécessaire]Considérons trois événements chronologiques situés dans le cône de lumière.
Sans restreindre la généralité, supposons
 .
.Notons
 le quadrivecteur de la différence entre les événements 2 et 1,
le quadrivecteur de la différence entre les événements 2 et 1,  celui de la différence entre le 3ème et le 2ème, donc
celui de la différence entre le 3ème et le 2ème, donc  celui de la différence entre le 3ème et le 1er. Par hypothèse
celui de la différence entre le 3ème et le 1er. Par hypothèse  et
et  , ce qui implique
, ce qui implique  par l’inégalité triangulaire de la norme euclidienne classique .
par l’inégalité triangulaire de la norme euclidienne classique .Il s’agit de montrer
ou encore
 lorsque
lorsque et
et .
.
L’inégalité de Jensen s’applique à la fonction
 qui est concave, soit
qui est concave, soit pour tout
pour tout  et
et  satisfaisant
satisfaisant  .
.
Avec
 et
et  , il vient
, il vient pour tout
pour tout  et
et  .
.
En choisissant
 et
et  , il vient
, il vientL’inégalité triangulaire classique, puis la convexité de la fonction
 (à nouveau l’inégalité de Jensen) impliquent
(à nouveau l’inégalité de Jensen) impliquent , soit
, soit pour tous vecteurs
pour tous vecteurs  et
et  .
.
En choisissant
 et
et  , on a
, on a  , et ainsi
, et ainsi .
.
Conditions d’égalité :Par « stricte » concavité de
 et convexité de , l’égalité
et convexité de , l’égalité  implique
implique  parallèle à
parallèle à  (et de même direction). puis
(et de même direction). puis  , soit
, soit  . Si l’inégalité triangulaire est une égalité, alors les quadrivecteurs des 3 événements sont alignés. La réciproque se vérifie facilement.
. Si l’inégalité triangulaire est une égalité, alors les quadrivecteurs des 3 événements sont alignés. La réciproque se vérifie facilement.Géométrie hyperbolique
Article détaillé : Modèle de l'hyperboloïde.Faire de la physique
Géométrisation de la physique relativiste
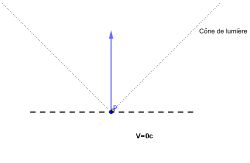
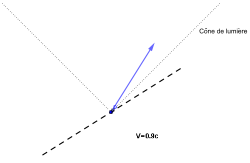
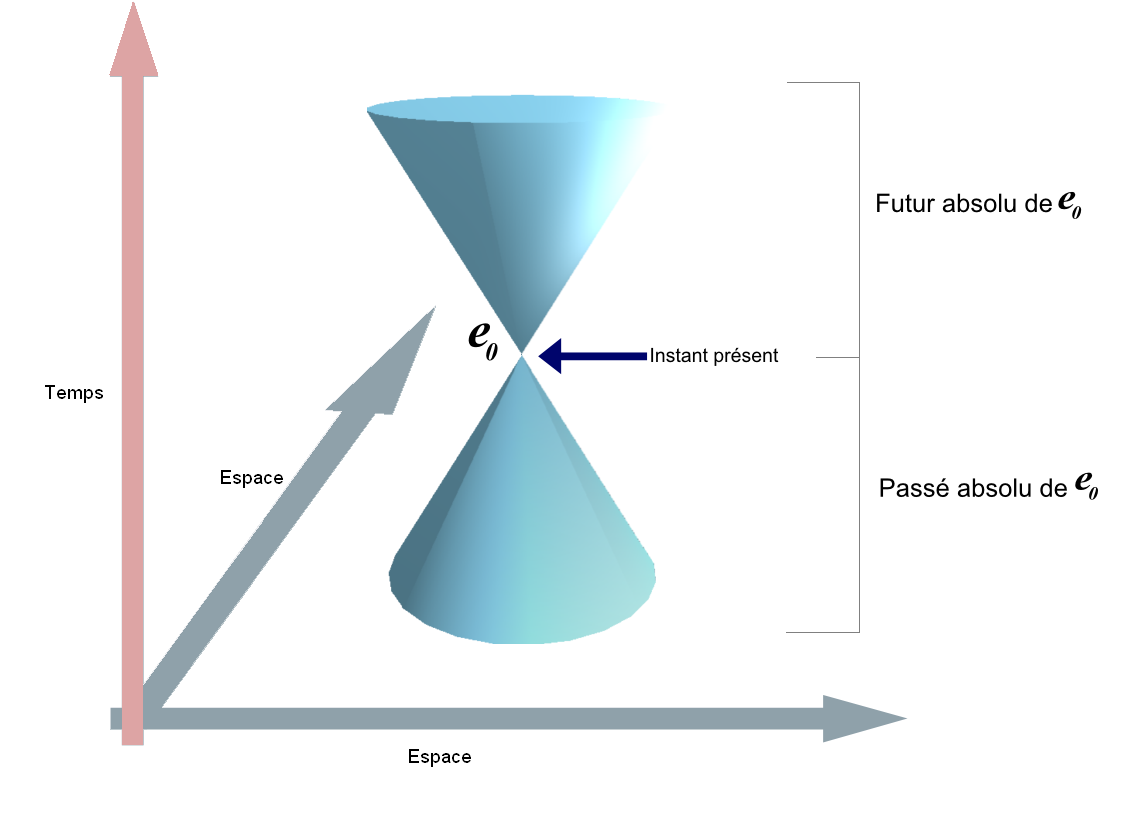
 Le cône de lumière de l'évènement e0.
Le cône de lumière de l'évènement e0.
La flèche rose montre la dimension temporelle et les flèches grises, les dimensions spatiales.Les points géométriques représentent les événements physiques et sont repérés par quatre coordonnées (ct,x,y,z) : la coordonnée de temps et les trois coordonnées d'espace. Les repères mathématiques y représentent les référentiels galiléens, et l'obligation en mathématiques de choisir un repère, pour désigner les points par des coordonnées, correspond à celle, en physique, de choisir un référentiel pour l'observateur, y compris pour le choix de la mesure du temps.
Du point de vue du réalisme intuitif, la particularité mathématique de cet espace affine tient à sa distance entre deux points, appelée pseudo-métrique, qui a été construite par Hermann Minkowski pour être invariante par les changements de repère que sont les transformations de Lorentz. La pseudo-métrique est aussi appelée pseudo-norme quand on n'utilise que l'espace vectoriel sous-jacent à l'espace affine. Cette pseudo-métrique correspond au temps propre entre deux événements qui peuvent être causalement joints, ou correspond à la distance propre entre eux s'il ne le peuvent pas.
La pseudo-métrique, notée
 , est définie par
, est définie par  ou
ou  suivant la convention de signes ( − ; + ; + ; + ) ou
suivant la convention de signes ( − ; + ; + ; + ) ou  choisie[6]. Cette définition rend la pseudo-métrique identique à l'intervalle d'espace-temps qui est l'invariant relativiste par changement de référentiel galiléen.
choisie[6]. Cette définition rend la pseudo-métrique identique à l'intervalle d'espace-temps qui est l'invariant relativiste par changement de référentiel galiléen.Un événement étant donné, l'ensemble des événements physiquement joignables dans le futur et de ceux du passé à partir desquels on pouvait joindre l'événement donné, forme un cône dans l'espace de Minkowski, appelé cône de lumière, et permettant des raisonnements purement géométriques par des dessins appelés diagrammes de Minkowski.
Cet espace est pseudo-euclidien : bien que la métrique ne soit qu'une pseudo-métrique, les géodésiques y sont les droites, ce qui fait dire que cet espace est plat comme dans un espace euclidien. Les inégalités triangulaires qui y sont valables montrent qu'un segment est le chemin le plus long entre deux points, ce qui est une nette différence avec la géométrie euclidienne.
Dans cet espace, la dimension relative au temps peut être considérée comme un nombre imaginaire, alors que les trois autres coordonnées (spatiales) sont toujours des nombres réels : ce choix modifie l'écriture de la pseudo-norme et la présentation des calculs, sans apporter plus de simplicité.
Un référentiel de l'espace (affine) de Minkowski est un référentiel galiléen pour un observateur : choix d'un lieu et moment de référence, choix d'axes tridimensionnels et d'un temps. Un observateur, et son référentiel, étant plongé dans cet espace, il repère un événement (point de l'espace-temps) par ses coordonnées temporelle (t) et spatiales (x;y;z) : un point M est noté
 , ou , en posant
, ou , en posant  .
.Orienter l'espace et le temps
La structure algébrique seule ne permet pas de faire de la physique, il faut pour cela au moins : introduire le principe de causalité qui impose que l'on ne peut physiquement rebrousser le cours du temps ; postuler qu'un changement physique de référentiel galiléen ne peut changer l'orientation de l'espace tridimensionnel.
Changer de référentiel
Article détaillé : Transformation de Lorentz.Changer de référentiel physique, en respectant la relativité, c'est utiliser un changement de référentiel mathématique qui laisse invariante la pseudo-norme, c'est-à-dire le carré de l'intervalle d'espace-temps : on doit donc se limiter aux éléments du groupe de Poincaré. Mais les contraintes physiques d'orientation de l'espace et du temps obligent à écarter 75% des éléments du groupe de Poincaré pour ne garder que ceux qui représentent un changement de référentiel réaliste : les translations, les rotations de l'espace physique à trois dimensions et les transformations de Lorentz propres et orthochrones.
Ligne d'univers
Article détaillé : Ligne d'univers.La trajectoire spatio-temporelle d'un corps ponctuel massif, appelée sa ligne d'univers, est une courbe dans l'espace de Minkowski ; mais toute courbe ne peut pas prétendre être une trajectoire réaliste (ligne d'univers) : elle doit pour cela toujours aller dans le sens croissant du temps et être entièrement contenue à l'intérieur de chacun des cônes de lumière centrés en chacun de ses points successifs (on dit alors qu'elle est de « genre temps ») ; sinon cela signifie que la vitesse de la lumière est atteinte ou dépassée au point où cette condition n'est pas respectée. La trajectoire d'un corps ponctuel de masse nulle (un photon par exemple) est une ligne d'univers contenue dans le bord du cône de lumière, cette trajectoire étant rectiligne en général.
Comme toute courbe, une ligne d'univers peut être paramétrée, le paramètre n'étant pas obligatoirement doté d'un sens physique, mais tout observateur plongé dans cet espace-temps doit y avoir accès : n'oublions pas que l'espace de Minkowski représente notre espace dans lequel le physicien se trouve. Les coordonnées du corps M s'écrivent alors
 , où
, où  est le paramètre.
est le paramètre.Pour l'observateur, le choix du temps de son référentiel comme paramètre est le plus naturel : les coordonnées du corps M s'écrivent alors
 . Avec ce choix, qui est le plus accessible à l'observateur et utilisé en physique classique, la vitesse s'exprime
. Avec ce choix, qui est le plus accessible à l'observateur et utilisé en physique classique, la vitesse s'exprime  , et n'est pas un quadrivecteur : sa pseudo-norme
, et n'est pas un quadrivecteur : sa pseudo-norme  est variable par changement de référentiel (sauf si
est variable par changement de référentiel (sauf si  ce qui n'est possible que si la masse est nulle) et les propriétés qu'elle vérifie ne sont peut-être pas valables dans d'autres référentiels. Par ce choix d'un paramètre propre à son référentiel, l'observateur accède difficilement à des propriétés générales concernant le corps en mouvement.
ce qui n'est possible que si la masse est nulle) et les propriétés qu'elle vérifie ne sont peut-être pas valables dans d'autres référentiels. Par ce choix d'un paramètre propre à son référentiel, l'observateur accède difficilement à des propriétés générales concernant le corps en mouvement.Quadrivecteurs
Article détaillé : Quadrivecteur.Un quadrivecteur est un vecteur
 ayant quatre coordonnées
ayant quatre coordonnées  liées au référentiel choisi, mais dont la pseudo-norme
liées au référentiel choisi, mais dont la pseudo-norme  est indépendante du référentiel. On dit que la pseudo-norme d'un quadrivecteur est un invariant relativiste.
est indépendante du référentiel. On dit que la pseudo-norme d'un quadrivecteur est un invariant relativiste.Quadri-vitesse
La quadrivitesse est un quadrivecteur, prolongeant la notion de vecteur vitesse dans l'espace de Minkowski. Ce vecteur est tangent à la ligne d'univers au point de l'espace-temps considéré, et dirigé vers le futur, sa pseudo-norme ne dépend pas du référentiel choisi pour en exprimer les coordonnées.
- Cas d'un corps massif
Pour déterminer des propriétés du mouvement du corps massif qui restent valables dans d'autres référentiels que le sien, l'observateur doit choisir un paramètre qui reste inchangé d'un référentiel à l'autre : le temps propre
 du corps en mouvement. Il n'est pas facilement accessible à l'observateur, toutefois sa définition permet d'écrire
du corps en mouvement. Il n'est pas facilement accessible à l'observateur, toutefois sa définition permet d'écrire  où
où  est la vitesse spatiale calculée de manière classique, d'où
est la vitesse spatiale calculée de manière classique, d'où  Ce qui montre que le temps propre peut être obtenu dans n'importe quel référentiel, par des mesures classiques et quelques calculs.
Ce qui montre que le temps propre peut être obtenu dans n'importe quel référentiel, par des mesures classiques et quelques calculs.En paramétrant par
, on a  , et
, et  . On remarque qu'ainsi définies les
. On remarque qu'ainsi définies les  ont la dimension d'une vitesse.[7]
ont la dimension d'une vitesse.[7]L'égalité
 , amène à
, amène à  , c'est-à-dire
, c'est-à-dire  . La vitesse ainsi considérée est de pseudo-norme invariante par changement de référentiel : c'est un quadrivecteur.
. La vitesse ainsi considérée est de pseudo-norme invariante par changement de référentiel : c'est un quadrivecteur.Par la relation entre
 et
et  , on montre que
, on montre que  [8], donc sachant que dans un référentiel inertiel un corps libre est doté d'une vitesse (classique :
[8], donc sachant que dans un référentiel inertiel un corps libre est doté d'une vitesse (classique :  ) constante par rapport au temps t, il en est de même pour sa quadri-vitesse
) constante par rapport au temps t, il en est de même pour sa quadri-vitesse  par rapport au temps propre τ.
par rapport au temps propre τ.- Cas d'un corps de masse nulle
Une particule de masse nulle est dotée d'une vitesse (classique) égale à la vitesse de la lumière :
 Dans ce cas la pseudo-norme de
Dans ce cas la pseudo-norme de  est égale à
est égale à  , c'est donc un quadri-vecteur : les égalités établies pour un corps massif n'ont pas besoin de l'être pour un corps de masse nulle, et d'ailleurs ne le peuvent pas, le temps propre de ce corps étant nul (
, c'est donc un quadri-vecteur : les égalités établies pour un corps massif n'ont pas besoin de l'être pour un corps de masse nulle, et d'ailleurs ne le peuvent pas, le temps propre de ce corps étant nul ( ).
).De manière générale, l'égalité
 montre que tout paramètre peut être choisi pour paramétrer la trajectoire du corps car la « vitesse »
montre que tout paramètre peut être choisi pour paramétrer la trajectoire du corps car la « vitesse »  ainsi obtenue a une pseudo-norme constante (nulle), et est donc un quadrivecteur :
ainsi obtenue a une pseudo-norme constante (nulle), et est donc un quadrivecteur :  .
.Quadri-impulsion
Article détaillé : Quadri-impulsion.- Cas d'un corps massif
À l'image de l'impulsion ou quantité de mouvement classique, on définit la quadri-impulsion
 , qui est un quadrivecteur car proportionnelle à la quadri-vitesse par un coefficient invariant par changement de référentiel (m, la masse). Si le corps est libre, sa quadri-impulsion est constante, comme sa quadri-vitesse.
, qui est un quadrivecteur car proportionnelle à la quadri-vitesse par un coefficient invariant par changement de référentiel (m, la masse). Si le corps est libre, sa quadri-impulsion est constante, comme sa quadri-vitesse.On note
 qui a la dimension d'une énergie, et
qui a la dimension d'une énergie, et  . On a
. On a  , d'où on déduit
, d'où on déduit  , ce que l'on peut écrire
, ce que l'on peut écrire  . Cette égalité montre que
. Cette égalité montre que  n'a pas de maximum, mais a comme minimum
n'a pas de maximum, mais a comme minimum  , l'énergie au repos ou énergie de masse. De plus, l'approximation aux petites vitesses devant c donnant
, l'énergie au repos ou énergie de masse. De plus, l'approximation aux petites vitesses devant c donnant  cela montre que tient le rôle de l'énergie totale[9] du corps en relativité restreinte (énergie au repos + énergie cinétique), relativement au référentiel de l'observateur, comme l'indique la présence de la vitesse classique dans l'égalité de .
cela montre que tient le rôle de l'énergie totale[9] du corps en relativité restreinte (énergie au repos + énergie cinétique), relativement au référentiel de l'observateur, comme l'indique la présence de la vitesse classique dans l'égalité de .À partir des définitions et égalités exposées, on peut montrer que
 . Cette égalité indépendante de la masse (bien que jusqu'ici supposée non nulle), montre que si alors E2 − p2.c2 = 0, ce qui assure que la masse du corps est nulle : un corps ayant la vitesse de la lumière est nécessairement de masse nulle.
. Cette égalité indépendante de la masse (bien que jusqu'ici supposée non nulle), montre que si alors E2 − p2.c2 = 0, ce qui assure que la masse du corps est nulle : un corps ayant la vitesse de la lumière est nécessairement de masse nulle.- Cas d'un corps de masse nulle
Si on multiplie la quadri-vitesse d'un corps de masse nulle par sa masse (nulle), on obtient une quadri-impulsion nulle : l'énergie d'un tel corps serait nulle, ainsi que sa quantité de mouvement. Or l'expérience la plus simple (se faire chauffer au soleil) montre que la lumière transporte de l'énergie : une quadri-impulsion non-nulle doit être définissable. Supposons cette quadri-impulsion connue :
 . Pour que ce quadrivecteur soit cohérent avec le reste de la théorie, il faut que sa pseudo-norme donne l'égalité E2 − p2.c2 = m2c4 = 0, donc
. Pour que ce quadrivecteur soit cohérent avec le reste de la théorie, il faut que sa pseudo-norme donne l'égalité E2 − p2.c2 = m2c4 = 0, donc  , ce qui est l'égalité
, ce qui est l'égalité  pour . Un corps de masse nulle doit donc nécessairement être doté de la vitesse de la lumière. Pour ce qui est de la lumière, sa connaissance nécessite un travail plus approfondit la concernant comme onde électromagnétique en physique relativiste, ou comme photon en physique quantique. Les autres particules de masse nulle relèvent de cette dernière théorie.
pour . Un corps de masse nulle doit donc nécessairement être doté de la vitesse de la lumière. Pour ce qui est de la lumière, sa connaissance nécessite un travail plus approfondit la concernant comme onde électromagnétique en physique relativiste, ou comme photon en physique quantique. Les autres particules de masse nulle relèvent de cette dernière théorie.Quadri-force
La quadri-force
 est définie par
est définie par  . Elle est égale à
. Elle est égale à  , où
, où  est la quadri-accélération définie par
est la quadri-accélération définie par  .
.L'égalité
 amène, par dérivation par τ,
amène, par dérivation par τ,  les deux quadrivecteurs sont orthogonaux.
les deux quadrivecteurs sont orthogonaux.
Cela permet d'écrire, après quelques manipulations algébriques, En définissant
En définissant 
 et en utilisant la relation entre et et celle entre et
et en utilisant la relation entre et et celle entre et  on obtient la relation
on obtient la relation  qui est interprétée comme étant l'expression relativiste du théorème de l'énergie cinétique.
qui est interprétée comme étant l'expression relativiste du théorème de l'énergie cinétique.Tenseurs
Article détaillé : Tenseur.Un tenseur d'ordre n de l'espace de Minkowski est une quantité localisée par ses coordonnées
 et ayant
et ayant  composantes dépendant linéairement des coordonnées lors d'un changement de référentiel. Cette dépendance linéaire fait qu'une égalité tensorielle établie dans un référentiel particulier est une égalité vraie dans tout référentiel.
composantes dépendant linéairement des coordonnées lors d'un changement de référentiel. Cette dépendance linéaire fait qu'une égalité tensorielle établie dans un référentiel particulier est une égalité vraie dans tout référentiel.Les tenseurs d'ordre 0 sont les constantes telles que la masse du corps, sa charge électrique, la vitesse de lumière, la pseudo-norme d'un quadrivecteur. Les tenseurs d'ordre 1 sont les quadrivecteurs. Les tenseurs d'ordre 2 sont, par exemples, le tenseur métrique, le tenseur électromagnétique.
L'utilisation du tenseur électromagnétique dans l'espace de Minkowski est la méthode la plus synthétique pour exprimer les propriétés du champ électromagnétique en relativité restreinte.
Notes
- Par exemple, la causalité est une hypothèse physique indépendante qu'il est nécessaire d'ajouter si on veut identifier l'espace de Minkowski à l'espace physique.
- (fr)Henri Poincaré et l’espace-temps conventionnel par Scott Walter, de l'université de Nancy et Archives Henri Poincaré (CNRS, UMR 7117).
- Avec la signature ( + ; − ; − ; − )
- Elle ne répond pas à la définition mathématique de distance, mais joue un rôle similaire à la distance dans un espace affine euclidien.
- Parmi la pseudo-métrique, la forme bilinéaire et la pseudo-norme, si l'une est laissée invariante par une transformation de l'espace alors les deux autres aussi sont invariantes.
- La convention
 correspond au choix fait dans les textes anglo-saxons ; la convention correspond au choix fait dans les célèbres textes pédagogiques de Lev Landau, par exemple. Ce dernier choix est considéré comme « plus physique » par Roger Penrose car la métrique est positive pour les lignes d'univers de genre temps, qui sont les seules admises pour des particules massives.
correspond au choix fait dans les textes anglo-saxons ; la convention correspond au choix fait dans les célèbres textes pédagogiques de Lev Landau, par exemple. Ce dernier choix est considéré comme « plus physique » par Roger Penrose car la métrique est positive pour les lignes d'univers de genre temps, qui sont les seules admises pour des particules massives. - Certains auteurs préfèrent paramétrer par
 , au lieu de , et la quadri-vitesse est alors sans dimension.
, au lieu de , et la quadri-vitesse est alors sans dimension. - Cette égalité peut être prise comme la définition de la quadri-vitesse : la pseudo-norme de étant
 , la pseudo-norme de
, la pseudo-norme de  est égale à c, donc est une constante indépendante du référentiel, on a alors un quadri-vecteur.
est égale à c, donc est une constante indépendante du référentiel, on a alors un quadri-vecteur. - En l'absence de champ électromagnétique et de charge électrique dans le corps : dans le cas contraire, un terme s'ajoute dans la définition de P0
Bibliographie
Voir aussi
- La matrice associée à cette forme bilinéaire, dans la base considérée ci-dessus, est






Wikimedia Foundation. 2010.