- AMESim
-
AMESim 
 Modélisation et Simulation avec AMESm
Modélisation et Simulation avec AMESmDéveloppeur LMS International Première version 1995 Environnement Multi-plateformes Langue Anglais, Chinois, Japonais Type Logiciel de CAE, Modélisation, Simulation, Interface utilisateur graphique Licence propriétaire Site web LMS Imagine.Lab AMESim website modifier 
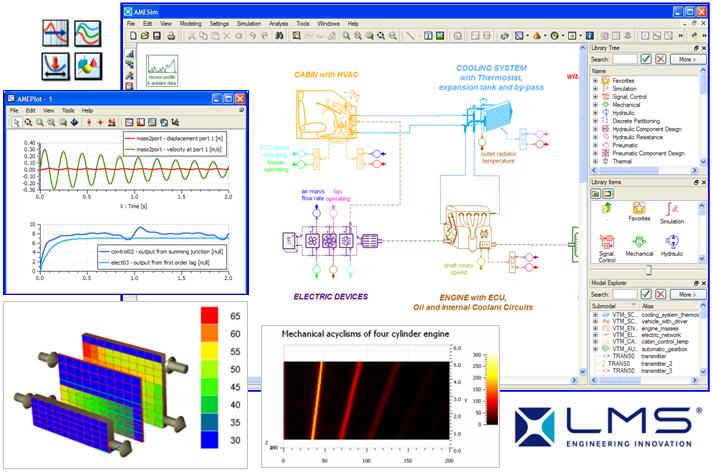
LMS Imagine.Lab AMESim (anciennement AMESim) est un logiciel de simulation pour la modélisation et l'analyse de systèmes 1D multi-domaines. Le logiciel offre une suite de simulation 1D pour modéliser et analyser les systèmes intelligents multi-domaines et prédire leur performance multi-disciplinaire. Les composants du modèle sont décrits en utilisant des modèles analytiques validés qui représentent le comportement réel hydraulique, pneumatique, électrique ou mécanique, du système.
Pour créer un modèle de simulation d'un système, un ensemble de bibliothèques validées peut être utilisé, contenant des composants prédéfinis pour différents domaines physiques. L'utilisateur peut composer un modèle d'un système basé sur la physique, à condition qu'il puisse être décrit de façon appropriée dans une représentation en géométrie unidimensionnelle. Les sous-modèles d'un système doivent être reliés entre eux - pour ce faire, chaque sous-modèle est doté de ports, qui peuvent avoir plusieurs entrées et sorties. La causalité est forcée en reliant les entrées d'un sous-modèle à la sortie d'un autre sous-modèle (et vice-versa). Cette approche donne la possibilité de simuler le comportement de systèmes intelligents avant que la géométrie CAO détaillée ne soit disponible.
AMESim fonctionne sur la majorité des plateformes de type UNIX (dont Linux) et sous Windows.
LMS Imagine.Lab AMESim Revision 10[1]a été publié en novembre 2010.
Sommaire
Entreprise
Le logiciel AMESim a été développé par la société Imagine. La société Imagine a été rachetée en juin 2007[2] par la société LMS International. Imagine avait été créée 20 ans auparavant en 1987 par Pierre Guérin et Michel Lebrun pour la conception et le contrôle de systèmes dynamiques complexes (initialement, la plateforme pétrolière Ekofisk en mer du Nord), en couplant des servo-actionneurs hydrauliques avec des structures mécanique en éléments finis.
LMS est un fournisseur de lociciels et de services en ingénierie pour les entreprises automobiles[3], aéronautiques et autres entreprises des industries mécaniques avancées. LMS International propose une combinaison de logiciels de simulation 1D et 3D, de systèmes d’essais et de services d’ingénierie axés sur des attributs tels que la dynamique des systèmes, l’intégrité des structures, la qualité sonore, la durabilité, la sécurité ou encore la consommation d’énergie.
Le siège de LMS est à Louvain, Belgique. LMS est une spin-off de la K.U. Leuven en 1980[4].
Utilisation
Par son utilisation, AMESim ressemble beaucoup à Simscape de The MathWorks.
AMESim est un logiciel multi-domaine : il permet de relier entre eux des systèmes des différents domaines physiques (hydraulique, pneumatique, mécanique, électrique, …).
La modélisation d'un système se fait en quatre étapes :
- mode sketch : pendant lequel on assemble les différents composants ;
- mode sous-modèle : pendant lequel on choisit le sous-modèle physique associé à chaque composants ;
- mode paramètre : pendant lequel on choisit les paramètres pour les différents sous-modèles ;
- mode simulation : pendant lequel on fait tourner la simulation.
Entre le passage du mode sous-modèle au mode paramètre, le sous modèle est compilé. Il est par conséquent nécessaire de disposer d'un compilateur. Sous la plateforme Windows, AMESim fonctionne avec le compilateur libre gcc (qui est fourni avec AMESim), mais également avec le compilateur de Microsoft Visual C++.
Depuis la version 4.3.0, AMESim utilise le compilateur Intel sur toutes les plateformes.
Plateforme AMESim
LMS Imagine.Lab AMESim offre une large gamme de fonctionnalités, ce qui en fait une plateforme à part entière pour la modélisation et la simulation :
- Fonctionnalités Plateforme
- Interface utilisateur graphique, aide interactive, supercomposants, variables post-traitées, expériences, meta-données.
- Outils d'Analyse
- Graphes et tracés, tableau de bord, Animation, Replay, éditeur de tables, analyse linéaire (valeurs propres, déformées modales, fonctions de transfert, lieu des racines), index d'activité.
- Optimisation, Robustesse, DOE
- Plan d'expériences (étude paramétique, full factorial, central composite), optimisation (NLPQL, algorithme génétique), Monte-Carlo (tir aléatoire, Latin Hypercube, Optimized Latin Hypercube, avec distribution uniforme ou gaussienne).
- Scripting du simulateur
- Fonctions de scripting pour piloter les simulations (depuis Microsoft Excel grâce aux sous-routines Visual Basic fournies, depuis Matlab, Scilab, Python), Circuit API (pour construire ses propres applications basées sur AMESim en C et en Python), Script File Generator (fichier de circuit API file automatiquement généré à partir du modèle existant).
- Customisation d'AMESim
- Outils personnalisés de pré et post-traitements customisés en Python, Script Caller Assistant, Editor of Parameter Group.
- Solveurs et Numérique
- LSODA, DASSL, DASKR, solveurs à pas fixe, partitionnement discret, traitement parallèle, cosimulations Amesim–Amesim.
- MIL/SIL/HIL et Temps-Réel
- Modélisation plant/control (interface Simulink, interface Labview), divers cibles Temps-Réel (xPC, dSPACE, Opal-RT, LabVIEW, Etas, …).
- Interfaces Logiciels
- Cosimulation générique (à utiliser pour cosimuler avec n'importe quel logiciel couplé avec AMESim), interface pour la maquette fonctionnelle (export, import).
- 1D/3D CAE
- Plateforme Modelica
- Support du langage de modélisation Modelica, et support des subsets de la Modelica Standard Library (MSL) avec des outils dédiés : éditeur de texte modelica, assistant d'import modelica, compilateur modelica, assemblage graphique modelica.
- Développement
- L'utilisateur peut développer ses propres sous-modèles en assemblant différents sous-modèles standards (supercomposants) ou en programmant ses propres sous-modèles en C ou en Fortran avec AMESet. Le code source C de la plupart des sous-modèles standards est fourni, ce qui permet aux utilisateurs de repartir de cette base pour répondre à leurs besoins.
Bibliothèques physiques
LMS Imagine.Lab AMESim est fourni avec deux bibliothèques par défaut : mécanique et signal. Les autres bibliothèques (environ 30) doivent être achetées séparément.
Pour créer un modèle de simulation système dans AMESim, un grand nombre de bibliothèques peuvent être utiliseés avec des composants prédéfinis à partir des différents domaines physiques. Le vaste ensemble de bibliothèques disponibles supprime le besoin de rédiger du code et il permet aux équipes de développement de mettre au point des modèles de systèmes complexes qui couvrent plusieurs domaines physiques simultanément. En ce sens, ces bibliothèques accélèrent la création de modèles et permettent de libérer du temps pour optimiser la conception. LMS affirme également que les éléments des bibliothèques sont tous entièrement validés[5], ce qui contribue à l'exactitude et à la fiabilité des résultats de la simulation.
LMS Imagine.Lab AMESim propose des bibliothèques pour :
- Contrôle-commande :
- Bibliothèques : signal et contrôle, générateur de signaux moteur.
- Composants : blocs continus, lecture de tables, fonctions, composants logiques, hystérésis, signal discret, routage, bus, commandes cycliques, …
- Electrique :
- Bibliothèques : base électrique, électromécaniques, moteurs électriques et pilotages, conversion statique électrique, électrochimie, électricité automobile.
- Composants : résistance, inductance, condensateur, transformateur, batterie, alternateur, machines synchrones, machines à induction, machines à courant continu, générateurs, Park direct, Park inverse, redresseurs, onduleurs, hacheurs, gradateurs, fils, fusibles, relais, ventilateurs, souffleurs, lampes et ampoules, systèmes de lève-vitres, bobines magnétiques, entrefers, fuites magnétiques, actionneurs piézoélectriques, …
- Mécanique :
- Bibliothèques : mécanique 1-D (linéaire et rotatif), mécanique plane, cames et suiveurs, import Eléments Finis (FEM), groupe motopropulseur, dynamique du véhicule.
- Composants : masses, ressorts, amortisseurs, culbuteurs, suivers, pignon et crémaillère, système vis-écrou, vis sans fin, leviers, engrenages, roulements, joints, accouplements, embrayages, caisses, pneus, …
- Fluides :
- Bibliothèques : hydraulique, conception des composants hydrauliques, résistances hydrauliques, remplissage, pneumatique, conception de composants pneumatiques, mélange de gaz, air humide.
- Composants : réservoirs, volumes, orifices, pertes de charge, coudes, expansions, contractions, jonction en T, roulements, poppets, spools, pistons, vérins, membranes, fuites, joints, … conduites hydrauliques et pneumatiques avec effets d'ondes et coups de bélier, tuyaux flexibles, vitesse du son, chocs, … base de données de propriétés de fluides et de gaz, …
- Thermodynamique :
- Bibliothèques : thermique, thermo-hydraulique, conception des composants thermo-hydraulique, thermo-pneumatique, flux diphasique, climatisation, système de refroidissement, échangeur de chaleur.
- Composants : capacités thermiques, conduction, convection, rayonnement, échangeurs, radiateurs, condenseurs, pompes, thermostats, compresseurs.
- Moteur à combustion interne :
- Bibliothèques : IFP conduite, IFP moteur, IFP échappement, CFD-1D, IFP C3D.
- Composants : moteurs, boîtes de vitesses, vilebrequin, arbre à cames, cylindre, combustion, échanges de chaleur aux parois, gestion du remplissage de l'air, soupapes, compresseurs, turbocompresseurs, conduites, injecteurs, post-traitement, catalyseurs, …
Suite logicielle AMESim
La suite logicielle LMS Imagine.Lab AMESim-Suite est constituée de différentes applications :
- AMESim :
- Produit principal pour la modélisation et la simulation de systèmes dynamiques ;
- Adaptatibilité, réutilisation, évolutivité, solveurs inégalés, fonctionnalités avancées.
- AMECustom :
- Personnalisation de modèles et protection de la propriété intellectuelle ;
- Adaptation et personnalisation de l'apparence des modèles, création et publication de catalogues prêts à l'emploi, facilite l'échange de modèles ainsi que leur chiffrement.
- AMERun :
- Simulation de modèles déjà existants ;
- Version run-only, adaptée pour les non-experts pour partager les modèles validés, solveurs standards et fonctionnalités avancées d'AMESim.
- AMESet :
- Développement de nouveaux composants ;
- Capitalisation de savoir-faire, plateforme ouverte, outil de développement intégré pour créer de nouveaux sous-modèles.
Industrie
LMS Imagine.Lab AMESim est utilisé par la plupart des constructeurs et fournisseurs dans l'industrie automobile, aéronautique et mécanique à travers le monde. La liste de référence inclut des entreprises comme General Motors, Toyota, Renault, PSA Peugeot Citroën, Bosch, Siemens, Delphi, Airbus, Embraer, Dassault Aviation, Snecma, Caterpillar, Komatsu, Cognizant et CNH Global[6].
Éducation et recherche
LMS Imagine.Lab AMESim est utilisé dans le monde entier par de nombreuses écoles d'ingénieurs et universités. C'est aussi une plateforme logicielle de référence pour de nombreux projets de Recherche en Europe.
Historique des releases
Nom/Version Numéro de Build Date AMESim ?? 1995 AMESim 1.0 v100 1996 AMESim 1.5 v150 1997 AMESim 2.0 v200 1998 AMESim 2.5 v250 Avril 1999 AMESim 3.0 v300 Juin 2000 AMESim 3.5 v350 Mai 2001 AMESim 4.0 v400 Mars 2002 AMESim 4.1 v410 Avril 2003 AMESim 4.2 v420 Septembre 2004 AMESim 4.3 v430 Octobre 2005 AMESim Rev 7A v700 Avril 2007 AMESim Rev 7B v710 Décembre 2007 AMESim Rev 8A v800 Juin 2008 AMESim Rev 8B v810 Décembre 2008 AMESim Rev 9 v900 Novembre 2009 AMESim Rev 10 v1000 Novembre 2010 Références
- What’s new in LMS Imagine.Lab AMESim Revision 10, LMS International. Consulté le 2011-04-15
- http://www.lmsintl.com/lms-international-announces-completion-of-imagine-acquisition
- Erreur dans la syntaxe du modèle ArticleAlfred Lynn, « Enabling Technologies for Simulation Science IX », dans , Orlando FL, vol. 5805, 29 March 2005, p. 24 [lien DOI]
- Facts and figures, LMS International. Consulté le 2011-07-14
- LMS Imagine.Lab AMESim brochure, LMS International. Consulté le 2010-04-06
- References, LMS International
Voir aussi
- Interface utilisateur graphique
- Systèmes dynamiques
- Puissance
- Energie
- Rendement énergétique
- Bond-Graphs (graphes de liaison)
- Mécatronique
- Thermodynamique
- Contrôle-commande
- Système Temps-réel
- Système embarqué
- Vibration
- Fréquence
- Amortissement
- Optimisation
- Ingénierie des systèmes
- Méthode des Eléments Finis (FEM)
- Computational Fluid Dynamics (CFD)
- Systèmes Multicorps (MBS)
Liens externes
- (en) LMS Imagine.Lab AMESim website
- (en) What's new in LMS Imagine.Lab AMESim REV 10
- (en) LMS Imagine AMESim
- (en) vehicledynamics-expo.com
- (en) sae.org
- (en) iaarc.org
- (en) elektronikvadisi.com.tr
- (en) mate.tue.nl
Catégorie :- Logiciel de calcul scientifique
Wikimedia Foundation. 2010.