- Sojourner
-
Mars Pathfinder
Caractéristiques de la mission : Nom Mars Pathfinder Pays États-Unis Objectif(s) Atterrir sur Mars et manœuvrer un robot à la surface de la planète. Vaisseau Mars Pathfinder Poids du vaisseau 870 kg Administration responsable de la mission JPL - NASA Fusée utilisée pour le lancement Delta 7925 (#D240) Date de lancement 4 décembre 1996 à 06:58:07 (heure universelle). Lancé depuis ESMC / Complexe de lancement 17B Instruments scientifiques Lander Mars Pathfinder : - Instrument IMP (Imagerie Mars Pathfinder,
(incluant un magnétomètre et un anémomètre) - Spectromètre à rayon X (APXS)
- Senseurs atmosphériques et météorologiques (Instruments ASI/MET)
Robot Sojourner:
- Système d'imagerie, comprenant trois caméras.
- Foreuse utilisant un laser
- Accéléromètres.
- Potentiomètres.
La mission Mars Pathfinder fut lancée le 4 décembre 1996 par la NASA grâce à une fusée Delta II, un mois après l'orbiteur Mars Global Surveyor. Après un voyage interplanétaire de sept mois, la mission se posa sur Mars, à Ares Vallis, dans la région de Chryse Planitia (à l'endroit même où la sonde Viking 1 n'a pu se poser en son temps), le jour de la fête nationale américaine (le 4 juillet 1997). Durant son voyage, la sonde a effectué quatre corrections de trajectoire (le 10 janvier, le 3 février, le 6 mai et le 25 juin). L'atterrisseur (en anglais lander), une fois à la surface, embarquait un petit robot, appelé Rocky ou Sojourner (du nom d'une célèbre abolitionniste américaine, défenseuse des droits de la femme, Sojourner Truth), qui déambula librement à la surface de la planète rouge.
La mission embarquait un certain nombre d'instruments scientifiques, destinés à analyser l'atmosphère martienne, son climat, la géologie (composition des roches et du sol). Mars Pathfinder fut le second projet du programme Discovery de la NASA, dont le leitmotiv était de concevoir des missions à faible coût. Comme le rappelait l'administrateur de la NASA, Daniel Goldin, la stratégie de l'agence spatiale se résumait désormais à la devise « plus vite, mieux et moins cher » (en anglais « faster, better and cheaper »). Le Jet Propulsion Laboratory (acronyme JPL), un département de l'Institut de Technologie de Californie, était le responsable de cette mission d'exploration martienne.
À la fin des années 1990, cette mission marque le grand retour de la NASA sur la planète rouge, après les missions Viking de 1976. Ce fut aussi la première fois qu'un robot mobile déambula sur une autre planète que la Terre (si on ne compte pas le Lunokhod 1 soviétique sur la Lune en 1970).
Cette mission fut un succès total pour la NASA, notamment parce qu'elle a été un moyen de valider des démonstrations technologiques qui n'avaient jamais été utilisées (exploiter des coussins gonflables, dits « airbags », pour « amarsir » était une première, d'autres rovers ont d'ailleurs réutilisé ce système par la suite, notamment les robots de la mission Mars Exploration Rover). Mars Pathfinder est aussi remarquable au vu de son coût très bas par rapport à d'autres missions spatiales robotisées. L'amarsissage est aussi une prouesse, car deux tiers des vaisseaux envoyés vers la planète Mars n'ont jamais atteint leur objectif final. (se reporter aux missions Mars Climate Orbiter ou Mars Polar Lander).
Sommaire
Site d'atterrissage
Le site d'atterrissage serait une ancienne plaine alluviale, située dans l'hémisphère nord de Mars. La région d'Ares Vallis a été choisie par les scientifiques parce qu'elle dispose d'une très importante quantité de roches. En admettant que les alluvions aient charié une multitude de roches très variées, le site promettait d'être intéressant. En outre, la surface était suffisamment plate pour un amarsissage en douceur. Une fois arrivé à bon port, le site où se posa le lander fut baptisé le « mémorial Carl Sagan » en l'honneur de l'astronome américain.
La sonde
La sonde était constituée d'un lander et d'un petit robot doté de six roues et pesant à peine 10,6 kg, appelé « Sojourner ».
Un amarsissage innovant
 Test des coussins gonflables (« Airbags ») de Mars Pathfinder
Test des coussins gonflables (« Airbags ») de Mars Pathfinder
 Le dégonflement des coussins gonflables laisse apparaître le rover
Le dégonflement des coussins gonflables laisse apparaître le roverMars Pathfinder a utilisé une méthode innovante pour se poser sur la surface de mars : il fut d'abord assisté par un parachute pour ralentir sa descente dans l'atmosphère ténue de la planète Mars, puis des coussins gonflables géants amortirent l'impact de la sonde avec le sol. Les sondes Viking utilisaient une méthode d'amarsissage plus classique, en utilisant des rétrofusées.
La mission
Le lander relayait les transmissions du robot vers la Terre, et il recevait les informations de la Terre à destination du rover. Le robot était téléguidé, mais il pouvait se déplacer de manière autonome lorsqu'il s'agissait d'éviter des petits obstacles.
La liberté de mouvement permise par ce petit robot a permis à l'équipe d'exploration d'analyser bien plus de roches et d'échantillons du sol que ne l'auraient permis une sonde traditionnelle. De son amarsissage le 4 juillet 1997 à sa dernière transmission, le 27 septembre 1997, la mission Mars Pathfinder a renvoyé pas moins de 16 500 images (via le lander), et 550 images grâce au rover. 15 analyses chimiques des roches et du sol ont été effectuées, ainsi que des relevés détaillés de météorologie (données liées aux vents, à la température). Ces données ont renforcé l'idée que Mars fut jadis plus chaude et humide, et que l'eau existait alors à l'état liquide à sa surface. L'atmosphère était probablement plus dense.
La raison exacte de la défaillance du lander n'est pas certaine, mais il s'agit probablement d'une défaillance de la batterie, ayant entraîné un refroidissement de celui-ci qui le rendit inopérant. Le robot Sojourner devait retourner de manière automatique près du lander, mais sa localisation exacte et son état restèrent inconnus. Malgré tout, le lander et le rover ont fonctionné bien plus longtemps que prévu. La dernière tentative de la NASA pour recontacter Pathfinder date du 10 mars 1998.
Objectifs de la mission Mars Pathfinder
- Prouver que la devise « faster, better and cheaper » (Plus rapide, mieux et moins cher) peut s'appliquer aux missions spatiales (la sonde fut développée en trois ans pour un coût inférieur à 150 millions de dollars). À titre de comparaison, le coût initial de la mission Mars Exploration Rover est de 800 millions de dollars.
- Démontrer qu'il est possible d'envoyer des instruments scientifiques sur une autre planète, tout en utilisant une technologie moins complexe, à un coût représentant seulement un cinquième de celui des missions Viking.
- Le coût total de la mission s'éleva à 280 millions de dollars, en y incluant les coûts annexes (opérations au sol durant la mission et lancement de la sonde).
Objectifs scientifiques
- Établir la morphologie et la géologie de la surface en utilisant une effectuant des mesures in-situ.
Entrée dans l'atmosphère, descente et amarssissage
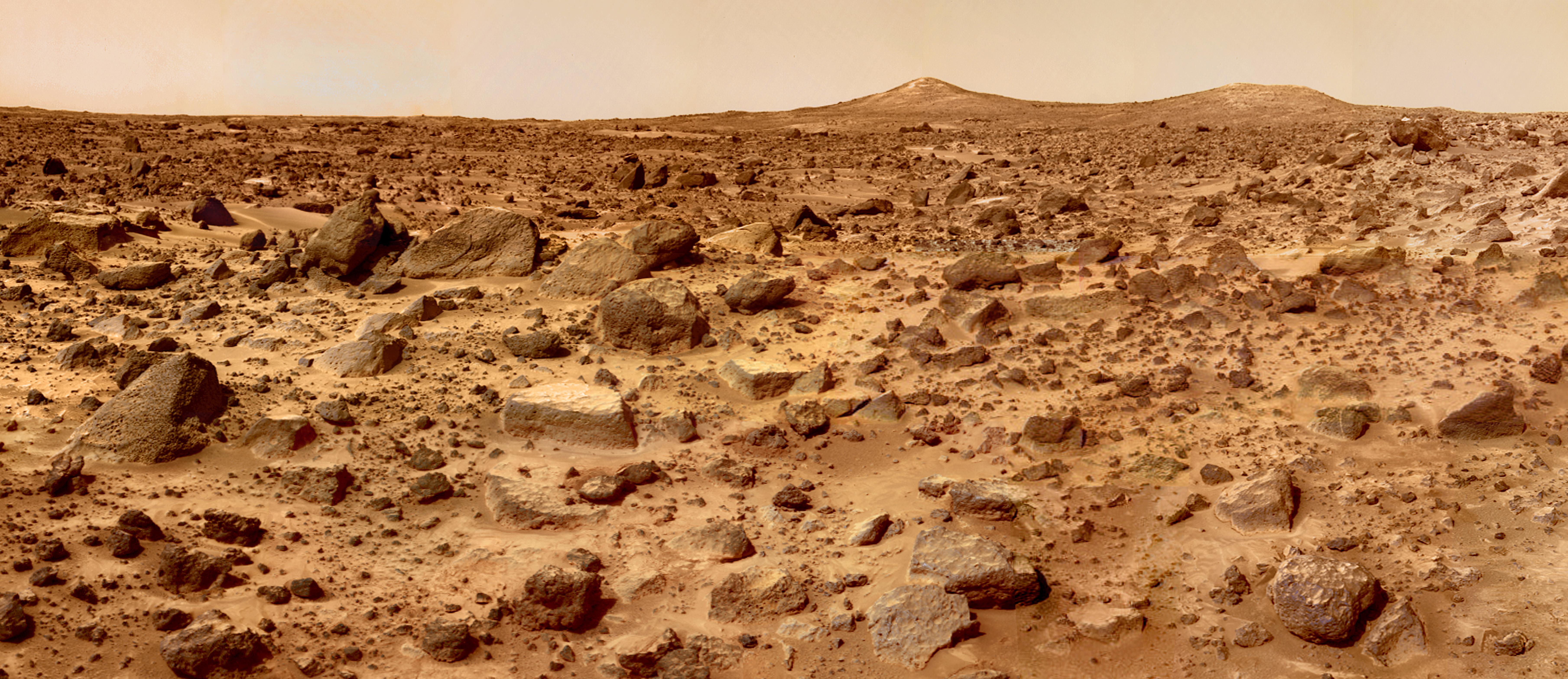
 Vue du site de Mars Pathfinder à Ares Vallis. Dans le lointain, on distingue nettement deux monts, baptisés Twin Peaks.
Vue du site de Mars Pathfinder à Ares Vallis. Dans le lointain, on distingue nettement deux monts, baptisés Twin Peaks.Durant la phase de rentrée atmosphérique, la sonde utilisa :
- Un bouclier thermique et un gros parachute permettant la décélération.
- Un altimètre radar pour mesurer avec précision la distance entre la sonde et le surface.
- Des rétrofusées pour ralentir la sonde durant sa descente.
- Enfin, 24 coussins gonflables (« airbags ») s'ouvrirent 8 secondes avant l'impact, après que la sonde se fut détachée de son parachute. L'impact avec la surface eu lieu à 10,6 mètres par seconde.
Tous les instruments nécessaires à la descente ont été déployés en 4 minutes.
Une fois que la sonde fut stabilisée à la surface, les coussins se dégonflèrent en se rétractant sous le lander. Pour finir, les pétales de l'atterrisseur s'ouvrirent et les panneaux solaires se déployèrent. Le lander arriva à 2 h 56 m 55 s du matin, heure martienne (soit 16 h 56 m 55 s UTC). Par conséquent, le lander dut attendre le lever du soleil pour envoyer ses premiers signaux vers la Terre. Le site d'amarsissage était situé à Ares Vallis, à 19,30 degrés de latitude nord et 33,52 degrés de longitude ouest, à 19 kilomètres au sud-ouest du site théorique planifié par les ingénieurs. Durant le premier sol, le lander prit des images et fit quelques relevés météorologiques. Une fois les premières données reçues, les ingénieurs réalisèrent qu'un des coussins gonflables ne s'était pas complètement dégonflé et qu'il pouvait obstruer la rampe de sortie nécessaire au robot Sojourner. Pour résoudre ce problème, ils rehaussèrent puis abaissèrent plusieurs fois un pétale du lander pour « aplatir » le coussin. Ce fut un succès.
Le robot Sojourner pose ses roues sur Mars
Sojourner sortit du lander dès le Sol 2. Durant les sols suivants, il s'approcha de plusieurs roches baptisées par les scientifiques « Barnacle Bill », « Yogi » et « Scooby Doo ». Ces noms s'inspirent de fameux personnages de dessins-animés. Le rover analysa la composition des roches et du sol, tandis que le lander prenait des photographies de Sojourner et de son environnement immédiat, tout en effectuant des relevés météorologiques.
Le robot Sojourner était un petit véhicule à six roues, mesurant 65 cm de long, 48 de large, et 30 cm de haut. Il pesait 10,6 kilogrammes. Il avait la capacité de se déplacer jusqu'à 500 mètres du lander, à une vitesse de 1 centimètre par seconde. Pendant 83 jours, il renvoya 550 photographies vers la Terre et analysa les propriétés chimiques de seize cibles scientifiques situées à proximité immédiate du lander.
Analyse des roches par le robot Sojourner
 Le robot Sojourner utilise son spectromètre APXS sur le rocher Yogi
Le robot Sojourner utilise son spectromètre APXS sur le rocher YogiLe rocher Barnacle Bill
La première analyse de roches commença au sol 3, avec un rocher surnommé « Barnacle Bill » par les scientifiques. Le spectromètre APXS (en anglais Alpha Proton X-ray Spectrometer) fut utilisé pour déterminer la composition de la roche, le spectromètre ayant mis 10 heures pour faire une analyse complète. Il détecta de nombreux éléments chimiques, à l'exception de l'hydrogène, qui constituait à peine 1% de la masse du rocher ou du sol. L'instrument APXS fonctionnait en irradiant les échantillons de roches et du sol avec des particules alpha (des nucléons d'hélium, eux mêmes constitués de deux protons et de deux neutrons). Les résultats confirmèrent que le rocher Barnacle Bill ressemble beaucoup aux roches terrestres de la famille des andésites, confirmant ainsi le passé volcanique de la planète rouge.
Le rocher Yogi
Article détaillé : Yogi Rock.L'analyse d'un gros rocher surnommé « Yogi » avec l'outil APXS démontra qu'il était principalement composé de basalte. De par sa forme et sa texture, on peut penser que le rocher Yogi fut déposé là grâce à un flux, probablement de l'eau.
Le rocher Moe
Un autre rocher, appelé « Moe » semblait érodé. Les scientifiques en déduirent que l'érosion éolienne pouvait modifier la forme des roches martiennes.
Autres observations de Sojourner
La plupart des roches analysées sur le site de Mars Pathfinder contenaient de fortes concentrations de silicone. Dans un secteur dénommé « Rock Garden » (littéralement en français, le « jardin de roches ») le robot Sojourner observa des petites dunes en forme de croissant de lune, en tout point similaires aux dunes paraboliques terrestres.
Observations du lander
Quant au lander, il renvoya 16 500 images, et effectua 8,5 millions de mesures liées à la pression atmosphérique, la température et à la vitesse des vents martiens.
Fin de la mission
La mission initiale était un succès si la sonde fonctionnait au moins une semaine, voire un mois. La durée de vie initiale fut dépassée, car des données furent retransmises durant trois mois. Le contact final avec Pathfinder s'établit le 27 septembre 1997 à 10 h 23 heure universelle. Les ingénieurs essayèrent de rétablir un contact durant les mois suivants, en vain, et cela jusqu'à une tentative ultime, le 10 mars 1998. Après l'amarsissage, l'atterrisseur Pathfinder fut baptisé « Mémorial Carl Sagan » (en anglais « Sagan Memorial Station ») en l'honneur du célèbre astronome et planétologue américain Carl Sagan.
Liens internes
- Exploration de la planète Mars
- Mars Exploration Rover
- Exploration spatiale
- Mutex (Cet article détaille le bug informatique dont fut victime la mission).
Liens externes
- (en) Site officiel de la mission Mars Pathfinder.
- (fr) Description de la mission Pathfinder sur le site de Philippe Labro.
- (en) Le site de la sonde Mars Pathfinder, vue par la caméra Hirise embarquée à bord de la sonde Mars Reconnaissance Orbiter (image publiée le 10/01/2007).
- (fr) Description et images d'une maquette fonctionnelle du robot Sojourner.
 Portail de l’astronautique
Portail de l’astronautique Portail de l’astronomie
Portail de l’astronomie
Catégories : Exploration de Mars | Sonde spatiale | Jet Propulsion Laboratory - Instrument IMP (Imagerie Mars Pathfinder,


Wikimedia Foundation. 2010.