- Opérateurs nabla dans les coordonnées cylindriques et sphériques
-
Nabla
Articles d'analyse vectorielle 

Objets d'étude Champ vectoriel Champ scalaire Équation aux dérivées partielles de Laplace de Poisson Opérateurs Nabla Gradient Rotationnel Divergence Laplacien scalaire Bilaplacien Laplacien vectoriel D'alembertien Théorèmes de Green de Stokes de Helmholtz de flux-divergence du gradient du rotationnel Nabla, noté
 , est un symbole mathématique pouvant aussi bien désigner le gradient d'une fonction en analyse qu'une connexion de Koszul en géométrie différentielle. Les deux notions sont évidemment reliées, ce qui explique l'utilisation d'un même symbole. En physique, il est utilisé de manière informelle en dimension 3 pour représenter aisément la divergence (∇·A), le rotationnel (∇∧A) et le laplacien vectoriel (ΔA = ∇2A) d'un champ vectoriel A, ainsi que le gradient (∇f) et le laplacien (Δf = ∇2f) d'un champ scalaire f. Ces notions sont fondamentales en physique, notamment en électromagnétisme et en hydrodynamique.
, est un symbole mathématique pouvant aussi bien désigner le gradient d'une fonction en analyse qu'une connexion de Koszul en géométrie différentielle. Les deux notions sont évidemment reliées, ce qui explique l'utilisation d'un même symbole. En physique, il est utilisé de manière informelle en dimension 3 pour représenter aisément la divergence (∇·A), le rotationnel (∇∧A) et le laplacien vectoriel (ΔA = ∇2A) d'un champ vectoriel A, ainsi que le gradient (∇f) et le laplacien (Δf = ∇2f) d'un champ scalaire f. Ces notions sont fondamentales en physique, notamment en électromagnétisme et en hydrodynamique.Sommaire
Origine historique
La forme de Nabla vient de la lettre grecque delta majuscule (Δ) renversée, à cause d'une utilisation comparable, la lettre grecque à l'endroit étant déjà utilisée pour désigner un opérateur (le laplacien) en calcul différentiel. Le nabla a été introduit par Peter Guthrie Tait en 1867. D'abord surnommé avec malice « atled » (delta à l'envers) par James Maxwell, le nom Nabla lui fut donné par Tait sur l'avis de William Robertson Smith, en 1870, par analogie de forme avec une harpe grecque qui dans l'antiquité portait ce nom.
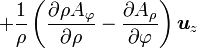
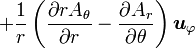
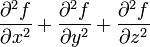
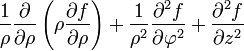
Formulaire d'analyse vectorielle
Ceci est une liste de quelques formules d'analyse vectorielle d'emploi général en travaillant avec plusieurs systèmes de coordonnées communs.
Opération Coordonnées cartésiennes (x,y,z) Coordonnées cylindriques (ρ,φ,z) Coordonnées sphériques (r,θ,φ) Définition
des
coordonnées




















Quelques autres règles de calcul Formule de Lagrange pour le produit vectoriel
Table avec les (nabla ou del) dans les coordonnées cylindriques ou sphériquesCes opérateurs ne sont pas de produits scalaires, mais bien d'applications, malgré la notation ambiguë
 . Le résultat est le même pour les coordonnées cartésiennes, mais devient faux pour les coordonnées curvilignes quelconques.
. Le résultat est le même pour les coordonnées cartésiennes, mais devient faux pour les coordonnées curvilignes quelconques.Voir aussi
Articles connexes
Liens externes
 Portail des mathématiques
Portail des mathématiques Portail de la physique
Portail de la physique
Catégories : Théorie des opérateurs | Analyse vectorielle | Méthode mathématique de la physique | Symbole mathématique

 (
(

 (
(

Wikimedia Foundation. 2010.