- Coordonnées sphériques
-
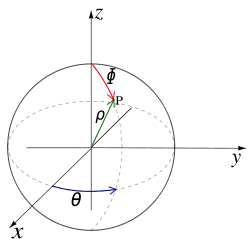 En coordonnées sphériques, la position du point P est définie par la distance ρ et par les angles θ et Φ.
En coordonnées sphériques, la position du point P est définie par la distance ρ et par les angles θ et Φ.
On appelle coordonnées sphériques divers systèmes de coordonnées de l'espace qui généralisent les coordonnées polaires du plan. Un point de l'espace y est repéré par la distance à un pôle et deux angles. Ce système est d'emploi courant pour le repérage géographique : l'altitude, la latitude, et la longitude sont une variante de ces coordonnées. Plusieurs systèmes de coordonnées sphériques sont également employés en astrométrie.
Il existe différentes conventions concernant la définition des angles. Cet article utilise la convention P(ρ,φ,θ), utilisée en mathématiques, où φ désigne la colatitude et est compris entre 0 et π, et θ désigne la longitude et est compris entre 0 et 2π.
Sommaire
Histoire
Article détaillé : histoire des fonctions trigonométriques.Définition et propriétés élémentaires
Conventions
- rayon-colatitude-longitude
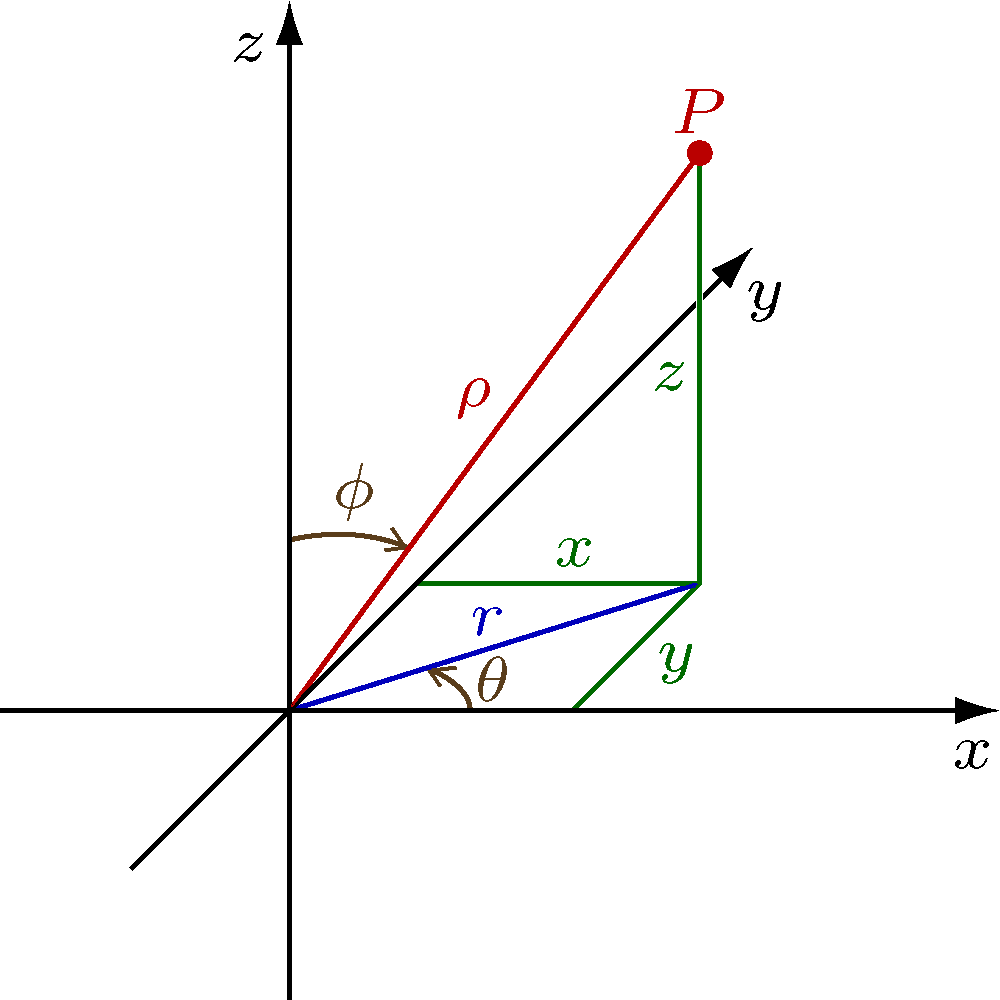
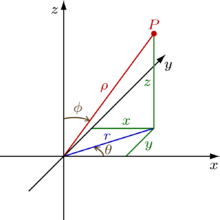 coordonnées sphériques (ρ, ϕ, θ) d'un point dans un repère cartésien (O, x, y, z).
coordonnées sphériques (ρ, ϕ, θ) d'un point dans un repère cartésien (O, x, y, z).Étant donné un repère cartésien (O, x, y, z), les coordonnées sphériques (ρ, ϕ, θ) d'un point P sont définies par :
- ρ est la distance du point P au centre O ;
- ϕ est l'angle non orienté formé par les vecteurs z et OP, appelé angle zénithal ou colatitude ;
- θ est l'angle orienté formé par les demi-plans ayant pour frontière l'axe vertical et contenant respectivement la demi-droite [O, x) et le point P. Si H est le projeté orthogonal de P dans le plan horizontal (O, x,y), alors θ peut être défini comme l'angle formé par les vecteurs x et OH.
Par convention, et pour assurer l'unicité pour ρ > 0, ϕ est compris entre 0 et π radians (0 et 180°) et θ entre 0 et 2π radians (0 et 360°)[1] (pour le repérage, mais θ et ϕ peuvent parcourir un intervalle plus important pour une courbe paramétrée ρ(θ, ϕ) ). En conséquence la relation de passage aux coordonnées cartésiennes s'écrit :
On utilise cette notation dans la suite de l'article.
- rayon-colatitude-longitude
En physique, les notations ϕ et θ sont généralement interverties[1], conformément au standard ISO 31-11 sur les « signes et symboles mathématiques à utiliser en sciences physiques et en technologie »[2]. La distance au pôle est souvent notée r[1].
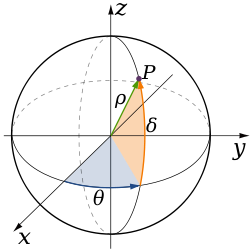 Un point repéré en coordonnées sphériques (rayon/longitude/latitude) ; ici la latitude est noté d'un δ
Un point repéré en coordonnées sphériques (rayon/longitude/latitude) ; ici la latitude est noté d'un δ- rayon-longitude-latitude
En mathématiques, on emploie également le système des géographes : on nomme les coordonnées (ρ, θ, δ), où ρ désigne toujours la distance du point au pôle, alors que θ désigne cette fois la longitude (angle mesuré depuis l'axe des x et généralement entre -180° et 180°) et δ la latitude, l'angle depuis le plan équatorial (entre -90° et 90°). L'échange entre les coordonnées cartésiennes et les coordonnées sphériques se fait alors par les formules :
Il est aisé de passer d'un système à un autre car latitude et colatitude sont liées par
- δ = 90 − ϕ
Lien avec les coordonnées polaires
Article détaillé : coordonnées polaires.Dans le plan vertical (O, z, OP), le système de coordonnées (ρ, Φ) est polaire. Dans le plan horizontal (O, x, y), (ρ sin Φ, θ) est aussi un système de coordonnées polaires.
Soit

P' le projeté de P sur le plan xOy


Les coordonnées cartésiennes du point P sont :

Utilisation
Repérage géographique
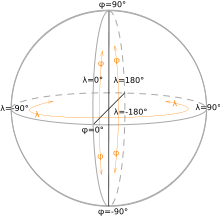 Coordonnées géographiques φ (latitude) et λ (longitude).Articles détaillés : coordonnées géographiques et géoïde.
Coordonnées géographiques φ (latitude) et λ (longitude).Articles détaillés : coordonnées géographiques et géoïde.Les coordonnées géographiques, utilisées pour se repérer sur la surface de la Terre, sont une variante des coordonnées sphériques. Elles utilisent les coordonnées h (altitude), l (latitude) et λ (longitude), qui sont reliées aux coordonnées sphériques par :
où ρg(l, λ) est la distance au centre de la Terre du point du géoïde situé dans la direction (l, λ). Lorsque l'ellipsoïde de révolution est utilisé à la place du géoïde, h est alors la hauteur géodésique ou hauteur ellipsoïdale, encore nommée hauteur au-dessus de l'ellipsoïde; elle diffère de l'altitude d'environ +/-100 m au plus. La hauteur ellipsoïdale est une grandeur purement géométrique, l'altitude est une grandeur physique. La grandeur h est la distance mesurée le long de la normale à l'ellipsoïde entre ce dernier et le point considéré.
Coordonnées célestes
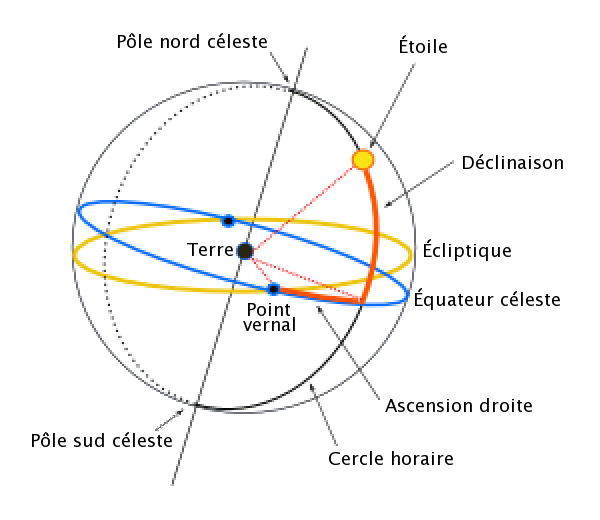
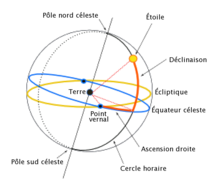 Coordonnées équatoriales : déclinaison et ascension droite.Article détaillé : coordonnées célestes.
Coordonnées équatoriales : déclinaison et ascension droite.Article détaillé : coordonnées célestes.Les coordonnées célestes, utilisées pour repérer les astres sur le ciel, utilisent cette même variante avec ρ fixé (projection sur la voûte céleste). Par exemple, le système de coordonnées équatoriales, utilisé pour repérer les objets hors du système solaire, utilisent la déclinaison (correspond à l) et l'ascension droite (correspond à λ, exprimée en heures, avec 1 h = 15°).
Calculs
Les coordonnées sphériques sont d'emploi courant dans trois cas :
- mouvement à distance fixe d'un point donné, comme dans le cas d'un pendule ;
- mouvement à force centrale, notamment dans le potentiel de Coulomb;
- problèmes présentant une symétrie sphérique.
Exemple du pendule
Article détaillé : pendule.Exemple de l'attraction coulombienne
Articles détaillés : équation de Schrödinger et harmonique sphérique.Propriétés
Propriétés différentielles
Différentielles
Le volume infinitésimal s'écrit
et la surface à ρ constant est
 .
.Les vecteurs de la base comobile
 ont pour différentielles :
ont pour différentielles :Cinématique
Les quantités cinématiques, position, vitesse et accélération s'en déduisent :
Opérateurs différentiels
Article détaillé : nabla.L'opérateur nabla, servant au calcul du gradient, de la divergence et du rotationnel s'écrit
Le laplacien s'en déduit :
Tenseurs usuels
Articles détaillés : tenseur métrique et symbole de Christoffel.Le tenseur métrique s'écrit
et l'intervalle
Les éléments non nuls du symbole de Christoffel sont
Relation avec les autres systèmes de coordonnées usuels
Les coordonnées cartésiennes (x, y, z), cylindriques (r, θ′, z) et sphériques, lorsqu'elles sont définies par rapport au même repère cartésien (O, x, y, z) suivent les lois de transformations données ci-dessous.
Système de coordonnées Depuis les coordonnées sphériques Vers les coordonnées sphériques Coordonnées cartésiennes 
![\begin{align}
\rho &= \sqrt{x^2+y^2+z^2},\\
\phi &= \arccos(z/\rho)\\
\theta &= \begin{cases}\arccos\frac{x}{\sqrt{x^2+y^2}} & \mathrm{si}\ y\geq0, \\[,5em] 2\pi-\arccos\frac x{\sqrt{x^2+y^2}} & \mathrm{si}\ y < 0;\end{cases}
\end{align}](4/374e1f98e1e47eb91d523707b5564008.png)
Coordonnées cylindriques 

Dans le tableau ci-dessus arctan(y, x) est le prolongement classique sur les différents quadrants de arctan(y/x) pour x et y positifs.
-
Coordonnées sphériques
-

Coordonnées cartésiennes
-

Coordonnées cylindriques
Généralisation
Article détaillé : 3-sphère#Coordonnées hypersphériques.Soit un espace vectoriel normé de dimension n finie. Pour un point x de cet espace, de coordonnées (x1, …, xn), on définit les coordonnées sphériques (r, ϕ1, …, ϕn-1) par
Les coordonnées sphériques constituent le cas particulier n = 3 et les polaires n = 2 ; on pourra consulter la section correspondante de l'article 3-sphère pour le cas n=4.
Sources
- Eric W. Weisstein, « Spherical Coordinates." » sur From MathWorld
- International Organization for Standardization, ISO Standards Handbook : Quantities and units., 3rd ed., Genève, 1993, 345 p., ISBN 92-67-10185-4

















Wikimedia Foundation. 2010.