- Géoémtrie de contact
-
Géométrie de contact
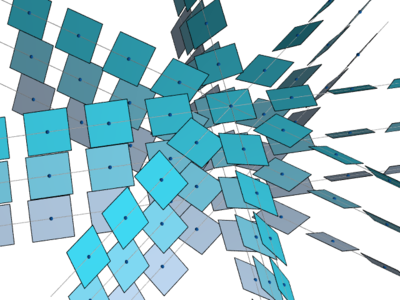 Structure standard sur ℝ3 : champ de plans
Structure standard sur ℝ3 : champ de plans
La géométrie de contact est la partie de la géométrie différentielle qui étudie les formes et structures de contact. Elle entretient d'étroits liens avec la géométrie symplectique, la géométrie complexe, la théorie des feuilletages de codimension un et les systèmes dynamiques. La géométrie de contact classique est née de l'étude de la thermodynamique et de l'optique géométrique. Une structure de contact sur une variété (géométrie) est un champ d'hyperplan, c'est-à-dire la donnée en tout point d'un hyperplan dans l'espace tangent. L'illustration montre un exemple de structure de contact sur ℝ3 qui est le modèle local de toutes les structures de contact en dimension trois.
Sommaire
Généralités
En géométrie différentielle, une forme de contact est une 1-forme différentielle α sur une variété différentielle V de dimension impaire 2n + 1, telle que
 soit une forme volume. De manière équivalente, on demande à ce que dα soit non dégénérée sur la distribution d'hyperplans kerα. Une forme de contact définit deux objets distincts : une structure de contact et un champ de Reeb.
soit une forme volume. De manière équivalente, on demande à ce que dα soit non dégénérée sur la distribution d'hyperplans kerα. Une forme de contact définit deux objets distincts : une structure de contact et un champ de Reeb.Selon le théorème de Frobenius, un champ d'hyperplans est localement intégrable lorsqu'il peut localement être décrit comme le noyau d'une 1-forme différentielle fermée. A l'opposé, une structure de contact est un champ d'hyperplans qui peut être défini localement comme le noyau d'une forme de contact : ce champ est maximalement non-intégrable. Plus précisément, on peut montrer que les sous-variétés intégrales d'un tel champ d'hyperplans sont de dimension au plus n. Lorsque cette dimension maximale est atteinte, on parle de sous-variétés legendriennes. En dimension trois, les sous-variétés legendriennes connexes et compactes sont des nœuds appelés nœuds legendriens ; il s'agit du cas aujourd'hui le plus étudié.
Pour une forme de contact α, il existe un unique champ de vecteurs R, appelé champ de Reeb, vérifiant : ι(R)α = 1 et ι(R)dα = 0. A ce champ de Reeb est associé un flot, le flot de Reeb.
Un application entre variétés de contact qui envoie une structure de contact sur l'autre est appelée transformation de contact ou contactomorphisme. La théorie de ces applications remonte à Sophus Lie.
Exemples
- En dimension 1, les formes de contact sont exactement les formes volumes. Les variétés connexes de dimension 1 étant à difféomorphisme près la droite réelle et le cercle, ces formes volumes sont essentiellement données par des fonctions dérivables d'une variable réelle.
- Structure de contact canonique sur ℝ2n+1 : Sur l'espace affine réel ℝ2n+1, muni du système de coordonnées usuel (x,y,z) = (x1,...,xn,y1,...,yn,z), les formes différentielles suivantes sont des formes de contact et les variétés de contact obtenues sont contactomorphes :
 et
et  .
. - Structure de contact canonique sur l'espace des 1-jets de fonctions : Le fibré J1(M,R) des 1-jets de fonctions d'une variété M dans ℝ est muni d'une structure de contact canonique caractérisée par le fait que les relevés de fonctions sont des sous-variétés legendriennes. Dans le cas où M = ℝn on retrouve la structure de contact canonique sur ℝ2n+1.
- Structure canonique sur la sphère : Dans ℂn+1 muni des coordonnées réelles usuelles (x1,y1,...,xn,yn), la sphère unité S2n + 1 admet une forme de contact naturelle, restriction de :
 .
. - Hypersurfaces strictement pseudo-convexes : Si W est une variété complexe et V une hypersurface réelle strictement pseudo-convexe de W alors le champ des hyperplans complexes du fibré tangent à W qui sont inclus dans le fibré tangent à V est une structure de contact. L'exemple des sphères plus haut en est un cas particulier.
- Structure canonique sur le fibré des hyperplans tangents : Si M est une variété, le fibré
 des hyperplans des espaces tangents à M porte une structure de contact canonique définie par
des hyperplans des espaces tangents à M porte une structure de contact canonique définie par  . Si M est munie d'une métrique riemannienne, il est possible d'identifier PT * M au fibré en sphères unités du fibré tangent de M, la structure de contact se transporte et se réalise comme le noyau de la restriction de la forme de Liouville, qui est donc une forme de contact. Le flot de Reeb n'est autre que le flot géodésique ; sa dynamique dépend évidemment de la métrique, en particulier de la courbure.
. Si M est munie d'une métrique riemannienne, il est possible d'identifier PT * M au fibré en sphères unités du fibré tangent de M, la structure de contact se transporte et se réalise comme le noyau de la restriction de la forme de Liouville, qui est donc une forme de contact. Le flot de Reeb n'est autre que le flot géodésique ; sa dynamique dépend évidemment de la métrique, en particulier de la courbure.
Existence et classification
Modèles locaux
Article détaillé : Théorème de Darboux (géométrie).Comme en géométrie symplectique, il n'existe aucun invariant local pour les structures de contact. En dimension 2n + 1, deux variétés de contact sont toutes localement conjuguées. Plus exactement :
Théorème de Darboux — Sur une variété différentielle M de dimension 2n + 1, une structure de contact se définit localement par une forme de contact α ; tout point x de M appartient à un voisinage, domaine d'une carte locale envoyant x sur 0 et α sur la forme de contact canonique de ℝ2n+1 (qui a été donnée dans les exemples ci-dessus).
Les problèmes qui se posent en géométrie de contact sont donc de nature globale. Le premier problème concerne l'existence et/ou l'unicité des structures de contact. Se pose donc le problème de leur classification à contactomorphisme près.
Deux structures de contact sont dites conjuguées (ou isomorphes ou contactomorphes) s'il existe un difféomorphisme qui envoie l'une sur l'autre. Deux structures de contact définies sur la même variété sont dites isotopes s'il existe un tel difféomorphisme qui est de plus isotope à l'identité.
Théorème de Gray — Si ξt,
![t\in[0,1]](/pictures/frwiki/100/d9a06fde4663cdd5b1ba693e9127232f.png) est une famille continue de structures de contact sur une variété fermée alors il existe une isotopie φt telle que
est une famille continue de structures de contact sur une variété fermée alors il existe une isotopie φt telle que  pour tous t.
pour tous t.De fait, la classification peut s'effectuer à conjugaison ou à isotopie près.
En dimension 3
L'existence d'une structure de contact sur une variété différentielle de dimension 3 impose à la variété d'être orientable. En effet, la structure de contact est localement définie comme le noyau de formes de contact αi définies sur des ouverts Ui recouvrant la variété. Pour i et j distincts, on est en mesure d'écrire αi = fijαj où fij est une fonction définie sur l'intersection
 ne s'annulant pas ; l'identité
ne s'annulant pas ; l'identité  montre que les orientations sur Ui définies par les formes volumes
montre que les orientations sur Ui définies par les formes volumes  se recollent en une orientation globale de la variété.
se recollent en une orientation globale de la variété.L'orientabilité de la variété est la seule contrainte topologique pour l'existence d'une structure de contact en dimension 3. Non seulement sur une variété orientable de dimension 3 il existe des structures de contact, mais il en existe en nombre suffisant :
Théorème de Lutz et Martinet — Sur toute variété fermée et orientable de dimension 3, tout champ de plans est homotope à une structure de contact. De plus on peut choisir cette structure de contact vrillée (cf. plus bas). En particulier, toute variété fermée orientable de dimension 3 possède une structure de contact.
Structures de contact vrillées
 Structure de contact vrillée sur R3
Structure de contact vrillée sur R3Suivant Eliashberg, on dit qu'une structure de contact en dimension trois est vrillée si elle contient un disque vrillé, c’est-à-dire un disque plongé qui est tangent à la structure de contact le long de son bord (comme le disque gris sur l'illustration). Les structures vrillées sont des objets purement topologiques et flexibles comme le montre le théorème suivant :
Théorème de classification des structures de contact vrillées (Eliashberg 1989[1]) — Sur une variété de dimension 3 compacte sans bord, deux structures de contact vrillées sont isotopes si et seulement si elles sont homotopes parmi les champs de plans.
Structures de contact tendues
Une structure de contact est dite tendue si elle n'est pas vrillée. Vu le théorème de Darboux et le fait que tout compact de ℝ3 peut être envoyé dans une boule arbitrairement petite par une transformation de contact, l'existence de structures tendue nécessite le :
Théorème de Bennequin[2] — La structure de contact canonique sur ℝ3 est tendue.
Cet énoncé est le théorème fondateur de la topologie de contact moderne. Ce théorème possède quatre démonstrations indépendantes. La démonstration initiale de Bennequin repose une étude de théorie des noeuds, elle reste en dimension trois. La preuve d'Eliashberg et Gromov en 1991 utilise le remplissage de la sphère S3 par la boule de dimension quatre et la théorie des courbes pseudoholomorphes, elle est donc de nature analytique. La preuve de Giroux en 2000 utilise les lemmes de bifurcation, elle est purement topologique et reste en dimension trois. Enfin la preuve de Ozvath et Szabo en 2002 utilise l'homologie d'Heegaard-Floer et donc les courbes pseudoholomorphes. Le premier corollaire de ce théorème est l'existence d'une structure de contact exotique sur ℝ3 puisqu'il est facile de définir une structure de contact vrillée sur ℝ3.
L'étude topologique systématique des structures de contact tendues a été rendue possible à partir de 1991 par la théorie des surfaces convexes de Giroux[3]. Cette théorie a ensuite été développée principalement par Giroux et Honda. Elle permet de classifier complètement les structures de contact tendues sur les espaces lenticulaires, les fibrés en tores sur le cercle, le tore plein, le tore épais et certains fibrés de Seifert.
Bien qu'il n'existe pas de classification générale des structures de contact tendues en dimension trois, les résultats suivants donnent un bon panorama :
Théorème de décompostion en somme connexe[4] — L'ensemble des structures de contact tendues sur une somme connexe
 est en bijection naturelle avec le produit de l'ensemble de structures de contact tendues sur M1 et M2.
est en bijection naturelle avec le produit de l'ensemble de structures de contact tendues sur M1 et M2.On peut donc restreindre l'étude aux variétés irréductibles. Le premier résultat général dans ce cadre fut
Théorème d'infinitude pour les variétés toroïdales[5],[6] — Toute variété de dimension trois compacte, sans bord, orientable et toroïdale possède une infinité de structures de contact universellement tendues.
La réciproque de ce théorème est contenue dans le théorème suivant :
Théorème de classification grossière[7] — Soit M une variété de dimension trois compacte, sans bord et orientable.
- Le nombre de classes d'homotopies de champs de plans sur M contenant une structure de contact tendu est fini.
- Si M est atoroïdale alors l'ensemble des structures de contact tendues à isotopie près est fini.
En grandes dimensions
La compréhension des structures de contact en grande dimension est encore embryonnaire comparée à ce qui est connu en dimension 3. L'existence n'est plus automatique et le seul résultat complètement général connu est le théorème des livres ouverts (voir ci-dessous). Un de ses corollaires est la preuve par Bourgeois [8] de l'existence de structures de contact sur tous les tores T2n + 1.
Par ailleurs l'homologie de contact (voir ci-dessous) a permis de mettre à jour de nombreuses structures de contact exotiques sur les sphères [9].
Outils de la géométrie de contact
Livre ouvert
La dernière révolution de la topologie de contact en dimension trois est le théorème des livres ouverts[10] de Giroux en 2001. Ce théorème montre que les structures de contact en dimension trois sont des objets purement topologiques et lie les structures de contact en grande dimensions à la géométrie de variétés de Weinstein.
En dimension trois, cette correspondance a permis en particulier la définition de l'invariant d'Ozsváth-Szabó [11], un nouvel outil particulièrement efficace pour montrer qu'une structure de contact est tendue.
Utilisation des courbes pseudoholomorphes
L'introduction des courbes pseudoholomorphes (ou courbes holomorphes, par abus) par Mikhaïl Gromov en géométrie symplectique a eu de nombreuses applications en géométrie de contact :
- Le théorème d'Eliashberg-Gromov[12] (1990) affirme qu'une structure de contact symplectiquement remplissable est tendue. Plus exactement, le bord convexe d'une variété symplectique compacte est une variété de contact tendue.
- La méthode de Hofer est une approche de la conjecture de Weinstein basée sur les courbes holomorphes.
- La théorie symplectique des champs[13] est une généralisation des invariants de Gromov-Witten dans l'esprit de l'homologie de Floer, elle contient comme cas particulier l'homologie de contact.
Liens avec les feuilletages
Bien qu'une structure de contact semble être l'opposé d'un feuilletage de codimension un, le developpement des deux théories a fait apparaître de nombreux points communs. De plus, la théorie des feuilletacts d'Eliashberg et Thurston est un pont direct entre les deux domaines qui permet notamment de montrer le :
Théorème de perturbation d'Eliashberg-Thurston[14] — Tout feuilletage de codimension un et de régularité au moins C2 sur une variété de dimension trois fermée orientée différente de
 est C0-proche d'une structure de contact positive.
est C0-proche d'une structure de contact positive.Références
Notes
- ↑ Eliashberg, Y. Classification of overtwisted contact structures on 3-manifolds, Invent. Math. 98 (1989), 623-637.
- ↑ Bennequin, D. Entrelacements et équations de Pfaff, Astérisque 107-108 (1983), 87-161.
- ↑ Giroux, E. Convexité en topologie de contact, Comment. Math. Helv. 66 (1991), 637-677.
- ↑ Colin, V. Chirurgies d'indice un et isotopies de sphères dans les variétés de contact tendues. C. R. Acad. Sci. Paris Sér. I Math. 324 (1997), no. 6, 659 – 663.
- ↑ Colin, V. Une infinité de structures de contact tendues sur les variétés toroïdales. Comment. Math. Helv. 76 (2001), no. 2, 353 – 372.
- ↑ Honda, K.; Kazez, W.; Matic, G. Convex decomposition theory. Int. Math. Res. Not. 2002, no. 2, 55 – 88.
- ↑ Colin, V.; Giroux, E.; Honda, K. On the coarse classification of tight contact structures. Topology and geometry of manifolds (Athens, GA, 2001), 109 – 120, Proc. Sympos. Pure Math., 71, Amer. Math. Soc., Providence, RI, 2003.
- ↑ Bourgeois, F. Odd dimensional tori are contact manifolds. Int. Math. Res. Not. 2002, no. 30, 1571 – 1574.
- ↑ Ustilovsky, I. Infinitely many contact structures on S4m + 1. Internat. Math. Res. Notices 1999, no. 14, 781 – 791.
- ↑ Giroux, E. Géométrie de contact: de la dimension trois vers les dimensions supérieures, Proceedings of the ICM, Beijing 2002, vol. 2, 405-414
- ↑ Ozsváth, P.; Szabó, Z. Heegaard Floer homology and contact structures. Duke Math. J. 129 (2005), no. 1, 39 – 61.
- ↑ Eliashberg, Y. Filling by holomorphic discs and its applications. Geometry of low-dimensional manifolds, 2 (Durham, 1989), 45 – 67, London Math. Soc. Lecture Note Ser., 151, Cambridge Univ. Press, Cambridge, 1990.
- ↑ Eliashberg, Y.; Givental, A.; Hofer, H., Introduction to Symplectic Field Theory, arXiv
- ↑ Eliashberg, Y.; Thurston, W.; Confoliations, University Lecture Series, American Mathematical Society , 1998, ix-66 p.
Introductions à la topologie de contact
- Giroux, E. Topologie de contact en dimension 3, Séminaire Bourbaki, 760 (199293) , 7-33
- Etnyre, J. Introductory lectures on contact geometry, Proc. Sympos. Pure Math. 71 (2003), 81-107.arXiv
- Geiges, H. Contact Geometry, arXiv
Histoire
- Lutz, R. Quelques remarques historiques et prospectives sur la géométrie de contact , Conf. on Diff.Geom. and Top. (Sardinia, 1988) Rend. Fac. Sci. Univ. Cagliari 58 (1988), suppl., 361-393.
- Geiges, H. A Brief History of Contact Geometry and Topology, Expo. Math. 19 (2001), 25-53.
 Portail de la géométrie
Portail de la géométrie
Catégorie : Géométrie symplectique
Wikimedia Foundation. 2010.