- Rotation plane
-
 Pour les articles homonymes, voir Rotation.
Pour les articles homonymes, voir Rotation.En géométrie dans le plan, une rotation plane est une transformation qui fait tourner les figures autour d'un point et d'un certain angle. Cette transformation est une isométrie car les distances sont conservées. La figure n'a été ni déformée, ni agrandie.
La rotation fait intervenir la notion d'angle orienté ce qui fait d'elle une des transformations les moins évidentes des transformations euclidiennes.
Sommaire
Définition, propriétés et caractérisations
Définition
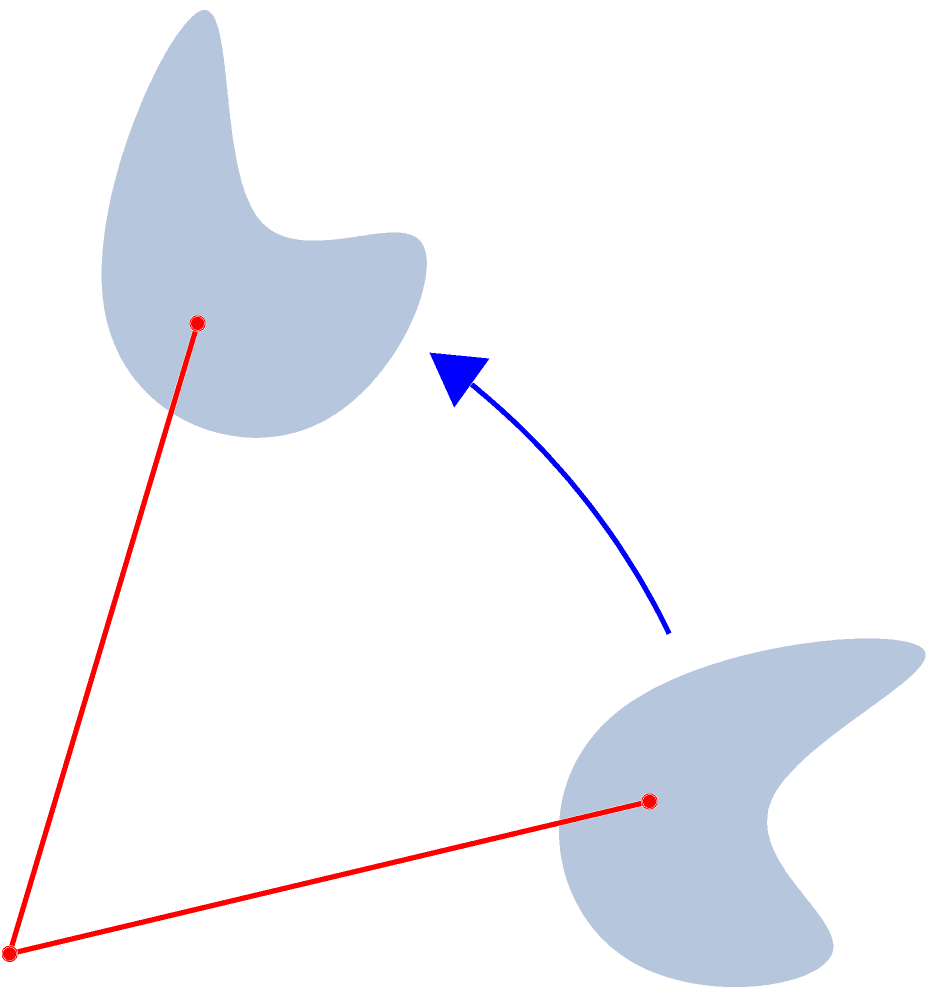
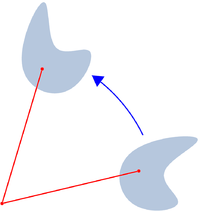 Image d'une figure par rotation
Image d'une figure par rotation
- Définition
- Dans le plan orienté, la rotation de centre C et d'angle θ est la transformation qui laisse C invariant et qui transforme tout point M distinct de C en le point M' tel que
- CM = CM' et

Les rotations les plus classiques sont
- les quarts de tour directs - rotations d'angle droit dans le sens trigonométrique (i.e. inverse des aiguilles d'une montre),
- les quarts de tours indirects - rotations d'angle droit dans le sens des aiguilles d'une montre,
- les rotations d'angle plat qui correspondent aux symétries centrales et aux homothéties de rapport -1,
- la rotation d'angle nul qui, quel que soit son centre, est l'identité.
- Construction de l'image d'un point par une rotation
- Tracer le cercle de centre C et de rayon [CM].
- Placer sur ce cercle le point M' , qui est l'image de M par cette rotation tel que .
Une rotation peut aussi être déterminée par un centre et l'image d'un point : Si C est un point et A et A' deux points distincts de C tels que CA = CA', il existe une unique rotation de centre C et qui transforme A en A'. L'angle
 est alors l'angle de la rotation.
est alors l'angle de la rotation.Propriétés
- Propriété 1
- L'image d'un segment [AB] est un segment [ A'B' ] tel que |AB| = |A'B'| .
- Propriété 2
- L'image d'un cercle C de centre O et de rayon r est un cercle C' de centre O' , l'image de O, et de même rayon r.
 Propriété du vecteur image
Propriété du vecteur image- Propriété 3 dite "de conservation"
- La rotation conserve :
- les longueurs ;
- les angles (l'image d'un angle est un angle de même amplitude) ;
- les parallèles (les images de deux droites parallèles sont deux droites parallèles) ;
- les aires (l'image d'une figure est une figure de même aire).
La rotation conserve donc les distances, c’est-à-dire que M'N' = MN. C'est donc une isométrie. Elle conserve donc les alignements, les angles et les concours. Elle conserve aussi l'orientation : si ABC est un triangle direct alors A'B'C' est aussi un triangle direct.
Fait important, on retrouve aussi l'angle de la rotation entre un vecteur et son image :
DémonstrationsLes triangles CMN et CM'N' sont isométriques de même orientation car
- CM = CM'
- CN = CN'

Donc, en particulier
- MN = M'N'

Une relation de Chasles sur les angles permet alors d'écrire :
les deux angles extrêmes s'annulent et celui du milieu vaut θ donc
Autre caractérisation
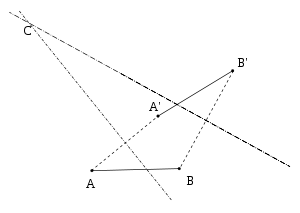
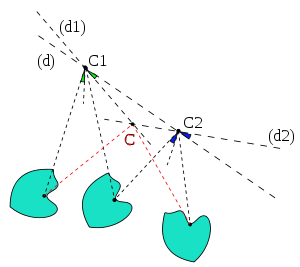
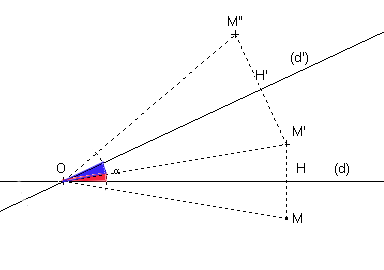
Une rotation peut donc être caractérisée par l'image de deux points : Soient A et B deux points distincts et A' B' deux points tels que AB = A'B' avec
 , il existe une unique rotation r qui transforme A en A' et B en B'. Cette rotation pour angle
, il existe une unique rotation r qui transforme A en A' et B en B'. Cette rotation pour angle  , et pour centre l'intersection des médiatrices de [AA'] et [BB'] (si elles se coupent) ou bien le point d'intersection de (AB) et de la médiatrice de [AA'] (si les médiatrices ne sont pas sécantes). Il n'est pas nécessaire de connaitre le centre de la rotation pour construire l'image M' du point M (distinct de A) car celui-ci vérifie les deux conditions suivantes:
, et pour centre l'intersection des médiatrices de [AA'] et [BB'] (si elles se coupent) ou bien le point d'intersection de (AB) et de la médiatrice de [AA'] (si les médiatrices ne sont pas sécantes). Il n'est pas nécessaire de connaitre le centre de la rotation pour construire l'image M' du point M (distinct de A) car celui-ci vérifie les deux conditions suivantes:- AM = A'M'

qui le définissent de manière univoque
 Cas des médiatrices sécantes
Cas des médiatrices sécantes Cas des médiatrices confondues
Cas des médiatrices confonduesRemarque : Si l'une des médiatrices n'existe pas, ce qui se produit quand A et A' ou B et B' sont confondus, le centre est alors immédiat : c'est, selon les cas, A ou B.
Invariance par rotation
Certaines figures sont invariantes par rotation. C'est le cas par exemple du carré de centre O, invariant par rotation de centre O et d'angle droit ou plat, ou du triangle équilatéral de centre O invariant par rotation d'angle 120°. On dit alors que ces figures possèdent une symétrie d'ordre 4 (pour le carré) ou d'ordre 3 (pour le triangle). L'ordre de la rotation correspond au nombre de rotations nécessaires pour revenir au point de départ.
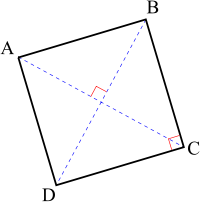 Carré et centre de rotation
Carré et centre de rotation Triangle équilatéral et centre de rotation
Triangle équilatéral et centre de rotationUn polygone régulier à n côtés possède une symétrie d'ordre n. Il existe des figures possédant une symétrie d'ordre n qui ne possèdent pas pour autant un axe ou un centre de symétrie. C'est le cas par exemple du Triskell qui possède une symétrie d'ordre trois (Rq: à cause de l'alternance noir/blanc, le Taijitu, symbole du Yin Yang ne possède pas la symétrie d'ordre deux qu'on pourrait lui prêter au premier abord).
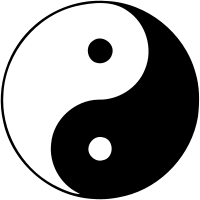 Symbole Yin-Yang
Symbole Yin-YangComposition et décomposition
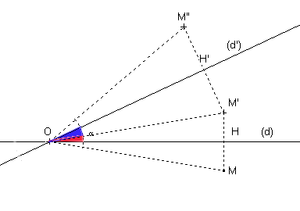 Composée de deux réflexions
Composée de deux réflexionsLa composée de deux réflexions (ou symétries) s (d) et s (d') d'axes sécants en O est une rotation de centre O . Plus précisément, si
 et
et 
alors
où r est une rotation de centre O et d'angle θ
Réciproquement, toute rotation de centre C se décompose en deux réflexions (symétries) d'axes sécants en C dont l'un peut être choisi arbitrairement pourvu que l'autre permette, en multipliant par deux l'angle formé par les vecteurs directeurs, de retrouver l'angle de la rotation.
La composée de deux rotations de même centre C et d'angles θ et θ' est une rotation de centre C et d'angle θ + θ'. Ces deux rotations commutent, c’est-à-dire que

L'ensemble des rotations de centre C, muni de la loi de composition est donc un groupe commutatif isomorphe à
La composée de deux rotations de centres différents et d'angles θ et θ' est
- une rotation d'angle θ + θ' si θ + θ' ≠ 2kπ
- une translation sinon
La recherche du nouveau centre et la démonstration de cette propriété s'obtient en décomposant chaque rotation en deux réflexions ayant un axe en commun. Cette composée est rarement commutative.
De plus, la composée d'une rotation et d'une translation reste une rotation de même angle dont le centre a changé.
 Composée de deux rotations
Composée de deux rotations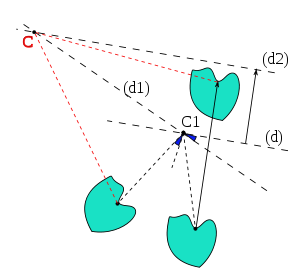 Composée d'une rotation et d'une translation
Composée d'une rotation et d'une translationL'ensemble formé de toutes les rotations planes et de toutes les translations, muni de la loi de composition interne forme un groupe non commutatif appelé le groupe des isométries directes.
Expression complexe
La rotation de centre C et d'angle θ a pour expression complexe
c’est-à-dire que, si zc est l'affixe de C, le point M d'affixe z a pour image le point M' d'affixe z' vérifiant l'égalité précédente.
Réciproquement, toute transformation dont l'expression complexe est
- z' = az + b, où a et b sont des complexes, vérifiant |a| = 1 et a ≠ 1
est une rotation dont le centre C a pour affixe
 et dont l'angle est l'argument de a
et dont l'angle est l'argument de aCette écriture complexe permet de retrouver aisément toutes les propriétés précédentes.
Formules de changement d'axes de coordonnées
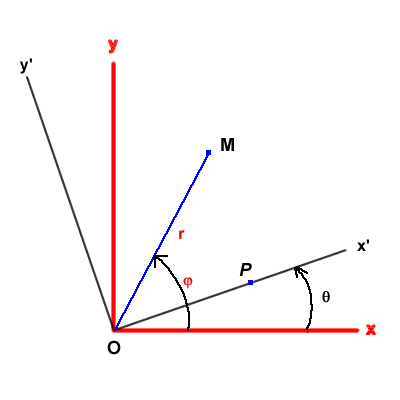
Il est courant en physique de devoir opérer une rotation des axes de coordonnées. Les formules qui suivent permettent d'exprimer les coordonnées d'un point M dans l'un des repères en fonction des coordonnées dans l'autre repère. Prenons un repère cartésien xOy dans lequel les coordonnées (x, y ) d'un point M s'expriment en fonction des coordonnées polaires (r, φ) par les formules élémentaires
 Changement de repère par rotation d'angle θ
Changement de repère par rotation d'angle θDans le nouveau repère x'Oy' déduit du précédent par une rotation d'angle θ (voir la figure) les nouvelles coordonnées polaires sont r et (φ - θ) et les coordonnées cartésiennes deviennent
En développant les fonctions trigonométriques et en tenant compte des expressions de x et y on arrive aux formules suivantes permettant de passer d'un repère à l'autre.
et, en sens inverse,
Un truc : s'il peut s'avérer difficile de mémoriser le signe à mettre devant sinθ (« + » dans une ligne et « - » dans l'autre) l'astuce consiste à considérer un point particulier (tel que P sur la figure) avec y = 0 ou y ’ = 0 selon les besoins et de vérifier alors sur la figure le signe de la coordonnée voulue.
Voir aussi
Liens externes


















Wikimedia Foundation. 2010.