- MSL
-
Mars Science Laboratory
Mars Science Laboratory 
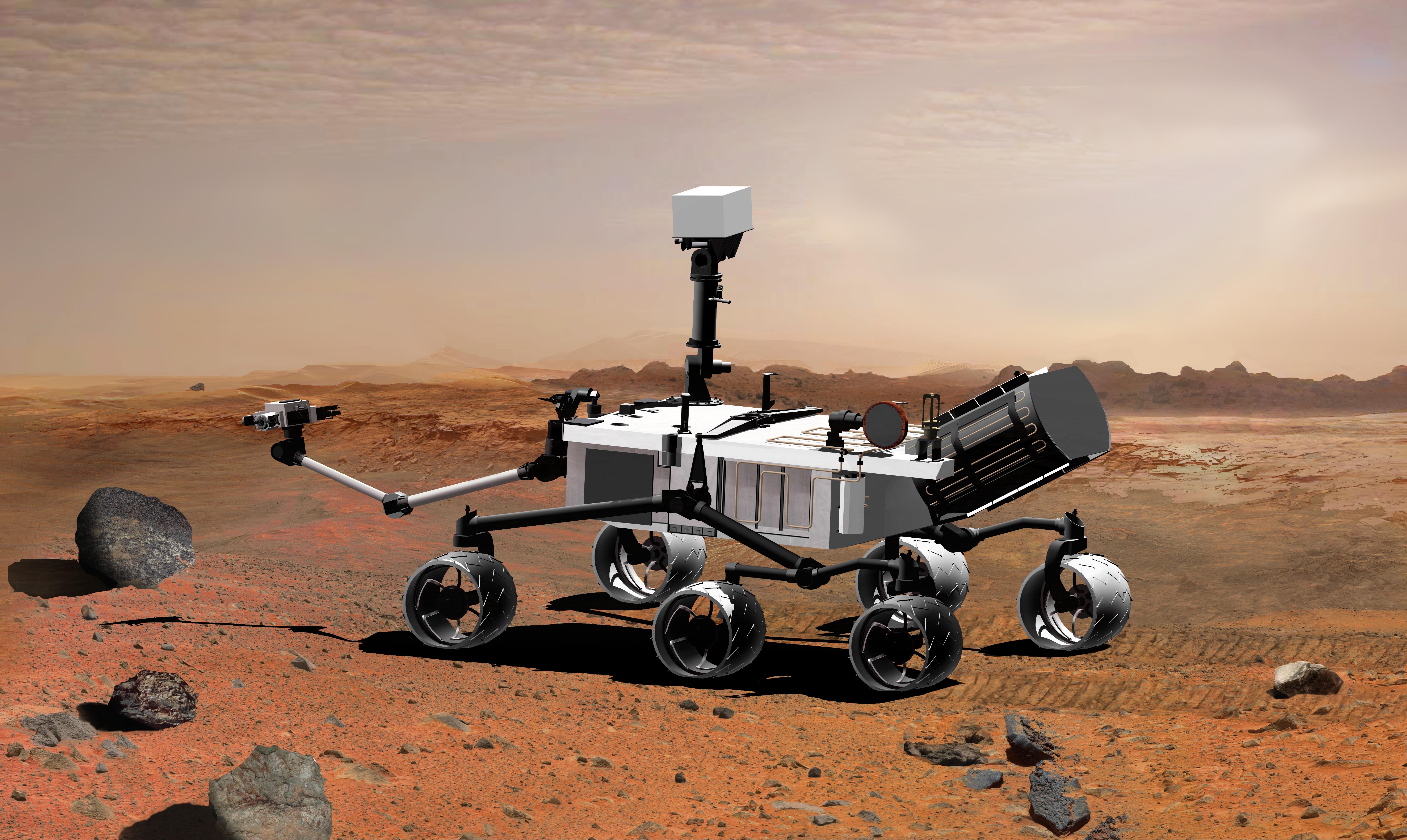
Vue d'artiste du rover MSLCaractéristiques Organisation NASA Domaine Étude climatique et géologique. Préparation des futures missions habitées Masse 775 kg dont 70 kg instruments Lancement 2011 Lanceur Atlas V Fin de mission {{{fin}}} Durée {{{durée}}} Durée de vie 2 ans Désorbitage {{{désorbitage}}} Autres noms Programme {{{programme}}} Index NSSDC [1] Site [2] Orbite {{{orbite}}} Périapside {{{périapside}}} Périgée {{{périgée}}} Apoapside {{{apoapside}}} Apogée {{{apogée}}} Altitude {{{altitude}}} Localisation {{{localisation}}} Période {{{période}}} Inclinaison {{{inclinaison}}} Excentricité {{{excentricité}}} Demi-grand axe {{{demi-grand axe}}} Orbites {{{orbites}}} Type {{{télescope_type}}} Diamètre {{{télescope_diamètre}}} Superficie {{{télescope_superficie}}} Focale {{{télescope_focale}}} Champ {{{télescope_champ}}} Longueur d'onde {{{télescope_longueur_d'onde}}} Instruments Mahli Caméra MastCam Caméra Mardi Caméra APXS spectromètre ChemCam spectromètre CheMin spectromètre Sam spectromètre Rad Détecteur de radiations Dan Détecteur de radiations Rems Station météorologique {{{instrument11_nom}}} {{{instrument11_type}}} {{{instrument12_nom}}} {{{instrument12_type}}} Le Mars Science Laboratory, baptisé Curiosity, est un robot mobile (rover) de la NASA qui doit explorer la surface de Mars à compter de 2012. Une fusée Atlas doit le lancer en 2011[1].
Le rover a été conçu pour remplir quatre objectifs :
- Déterminer si la vie a pu exister sur la planète Mars ;
- Caractériser son climat ;
- Caractériser sa géologie ;
- Préparer l'exploration humaine de Mars.
Instruments embarqués
Le rover embarque plusieurs instruments scientifiques qui doivent lui permettre de détecter d'éventuelles traces d'eau, d'analyser précisément les roches, d'étudier les minéraux présents à la surface de Mars, et de caméras pouvant photographier en haute résolution. Présentation de ces instruments :
- Mahli caractérise la composition et la microstructure des roches, du sol, du givre et de la glace ;
- MastCam étudie l’absorption de la lumière par le sol martien ;
- Mardi cartographie l’environnement local du rover ;
- APXS mesure l’abondance des éléments chimiques lourds dans les roches et le sol ;
- ChemCam analyse à distance la nature, la composition et l’état d'altération des roches ;
- CheMin détecte la présence de minéraux formés en présence de l’eau ;
- Sam détecte des composés organiques et étudier leur chimie ;
- Rad caractérise de nombreux types de radiations en vue de l’exploration humaine ;
- Dan détecte les neutrons liés à l’hydrogène de l’eau sous la surface ;
- Rems est une station météorologique qui mesure la pression atmosphérique, l’humidité, les radiations ultraviolettes, la vitesse du vent, la température du sol et de l’air.
MSL intègre un instrument développé en partie par le CESR à Toulouse, ChemCam. Cet instrument permettra de faire de la spectroscopie à distance grâce à un rayon laser (partie gérée par le CESR) qui, en impactant la roche, va générer un plasma dont l'étude spectroscopique de la lumière de désexcitation permettra de connaître la composition élémentaire de la cible volatilisée. Ainsi, le rover sera capable d'analyser un nombre relativement important de roches autour de lui et de déterminer, grâce aux résultats fournis par ChemCam, lesquelles méritent d'être étudiées plus précisément avec les autres instruments qui travaillent au contact.
Spécifications du rover
Par rapport à ses prédécesseurs le rover est un engin particulièrement imposant (775 kg contre 174 kg pour les rovers Spirit et Opportunity et les 10,6 kg de Sojourner) ce qui lui permet d'embarquer 80 kg d'instruments (contre 6,8 kg pour Spirit et Oppotunity). Il est long de 2,7 mètres et peut se déplacer théoriquement à une vitesse de 90 mètres par heure en navigation automatique mais ne devrait pas pouvoir effectuer plus de 30 mètres par heure en moyenne compte-tenu des irrégularités du terrain, des problèmes de visibilité, etc.

Au départ de l'orbite terrestre le vaisseau spatial qui emporte le rover pèse 3 400 kg qui comprennent outre les 850 kg du rover proprement dit, 600 kg pour l'étage de croisière qui prend en charge le trajet Terre-Mars et effectue les corrections de trajectoire nécessaire. L'étage de descente pèse 829 kg auquel il faut ajouter 390 kg de carburant, 389 kg de bouclier thermique et 349 kg d'enveloppe externe arrière. [2]
Le rover sera bien plus performant que les robots actuels grâce à l'emport d'un Générateur thermoélectrique à radioisotope (RTG) utilisant une charge de plutonium qui lui permettra de disposer d'une énergie abondante (2,5 kW/h au lieu de 0,6-0,9 kWh par jour sur Opportunity et moins encore après plusieurs années d'utilisation, le 12 mai 2009 (après 1884 sols) la production d'électricité d'Opportunity était de 460 Wh, 850-900Wh de production électrique au tout début de la mission) indépendante de la luminosité et qui donc contrairement au cas de Spirit et d'Opportunity n'entrainent pas d'arrêt durant l'hiver martien. MSL dispose d'une autonomie nominale d'une année martienne soit deux années terrestres mais sa source d'énergie devrait continuer à fonctionner durant 14 années.
Un système de radiateur composé de près de 50 mètres de tubes dans lesquels circule un fluide permet de rejeter la chaleur excédentaire.
Le rover dispose de deux ordinateurs identiques blindés pour résister aux radiations. Chaque ordinateur comporte 256 ko d'EEPROM, 256 Mo de mémoire Dram et 2 Go de mémoire flash. Une centrale à inertie à 3 axes doit faciliter la navigation sur le terrain.
Une nouvelle technique d'atterrissage
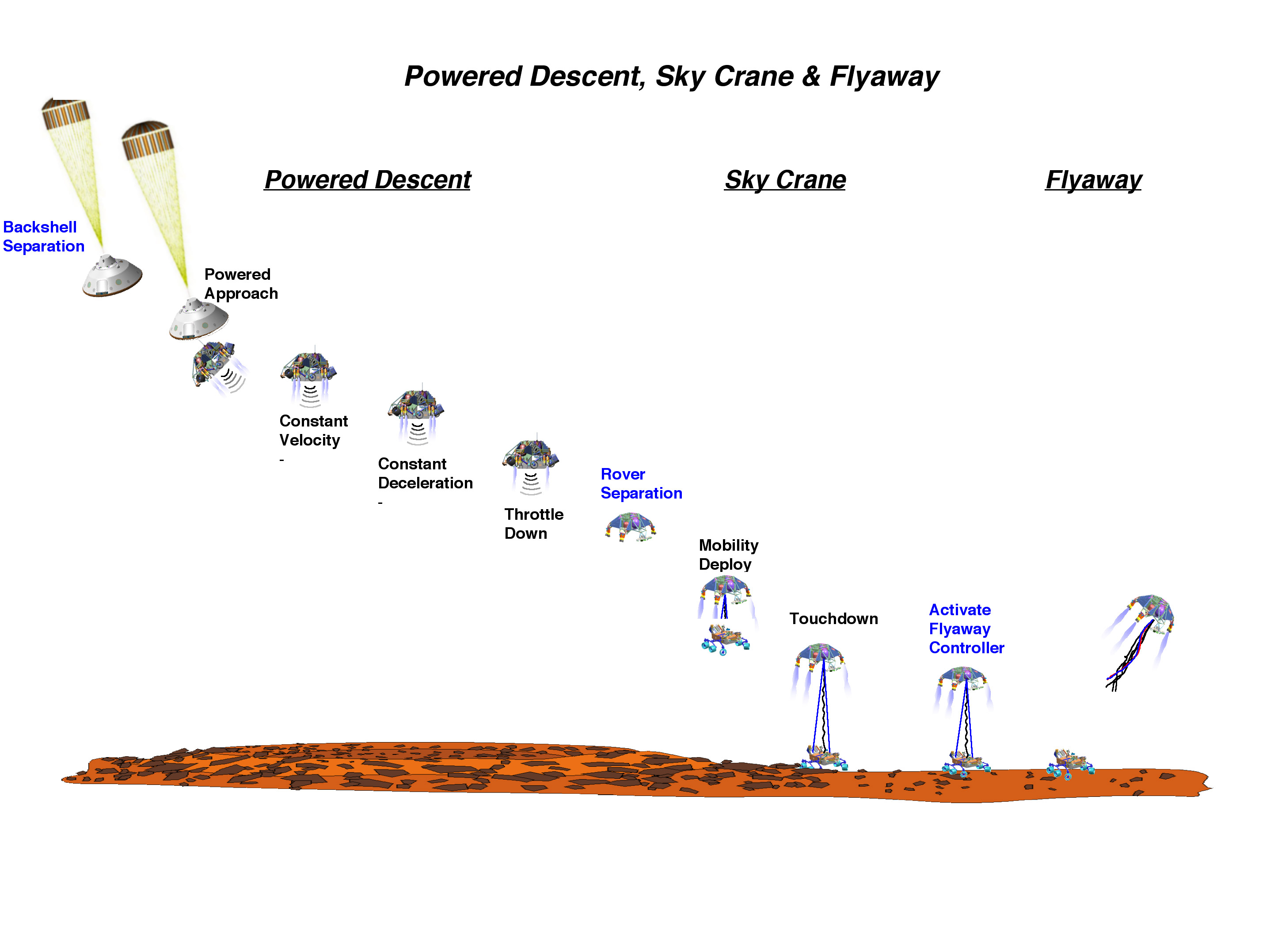
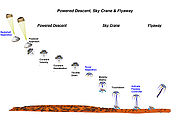 Schéma de la phase finale de descente du du rover sur le sol martien
Schéma de la phase finale de descente du du rover sur le sol martien
 Une maquette du rover MSL placée à côté du rover Spirit qui donne l'échelle
Une maquette du rover MSL placée à côté du rover Spirit qui donne l'échelle Les parachutes en test dans la soufflerie de la NASA (avril 2009).
Les parachutes en test dans la soufflerie de la NASA (avril 2009).Le rover inaugure une nouvelle technique d'atterrissage final sur Mars car le système des coussins gonflables utilisés pour Spirit n'était pas adapté à son poids et dans l'atmosphère très peu dense de Mars un parachute n'est suffisant pour effectuer un atterrissage en douceur. Un deuxième changement dans la technique mise en oeuvre durant la première phase de descente doit permettre de réduire à 10 km la distance entre le point d'atterrissage et le lieu visé (au lieu de 150 km pour Spirit). La descente vers Mars qui dure environ 6 minutes comporte 4 étapes[3] [4] :
- Avant de pénétrer dans l'atmosphère martienne le rover se sépare de l'étage de croisière qui a géré la traversée Terre-Mars. Lorsque le rover entame sa descente vers le sol martien il est toujours à l'intérieur d'une enveloppe qui l'a protégé durant la traversée Terre-Mars et qui comporte un bouclier thermique. Le freinage atmosphérique porte la température du bouclier à 1450 °C. Durant cette phase l'angle d'entrée est régulièrement ajusté pour se maintenir sur la trajectoire idéale.
- Quatre minutes et demi après le début de la rentrée, alors que la vitesse est descendue à mach 2, le bouclier est largué et une demi minute plus tard un parachute se déploie.
- Lorsque le rover atteint l'altitude de 1 500 mètres, le parachute est largué et l'étage de descente allume ses 8 moteurs pour achever de freiner la descente. Le rover est à ce moment suspendu sous l'étage de descente.
- Alors que le rover touche presque terre, l'étage de descente descend le rover au bout de 3 suspentes de 7,5 mètres. Le rover déploie ses roues et se met en ordre de fonctionnement. Le déploiement du rover est achevé 8 secondes après le début de cette phase et 8 secondes plus tard le rover touche doucement le sol. Lorsqu'il a confirmé qu'il est bien sur le sol, l'étage de descente lui donne l'instruction de couper les suspentes puis s'écarte avant d'aller s'écraser plus loin sur le sol martien.
Le choix du nom de baptême du rover
La NASA après une sélection de neuf finalistes (Journey, Wonder, Perception, Adventure, Sunrise, Curiosity, Amelia, Poursuit et Vision) sur plus de 9000 propositions et le vote des internautes a finalement retenu le nom de Curiosity, le 27 mai 2009. Ce nom a été proposé par une jeune fille de 12 ans, Clara Ma.
Traduction de l’essai qu’elle a envoyé à la NASA :
« La curiosité est une flamme éternelle qui brûle dans tous les esprits. Elle me pousse hors du lit le matin et m’interroge sur les surprises que la vie me lancera en ce jour. La curiosité est une force tellement puissante. Sans elle, nous ne serions pas ce que nous sommes aujourd’hui. Quand j’étais plus jeune, je me demandais « Pourquoi le ciel est-il bleu ? », « Pourquoi les étoiles scintillent-elles ? », « Pourquoi suis-je moi ? », et je m’interroge encore. J’ai tellement de questions, et l’Amérique est le lieu où je veux trouver mes réponses. La curiosité est la passion qui nous pousse dans notre vie de tous les jours. Ce besoin de poser des questions, de s’émerveiller, a fait de nous des explorateurs et des scientifiques. Bien sûr, il y a beaucoup de risques et de dangers, mais malgré cela, nous continuons toujours à nous interroger et à rêver, à créer et à espérer. Nous avons déjà tant découvert sur le monde, mais nous en savons en fait tellement peu. Nous ne saurons jamais tout ce qu’il y a à savoir, mais grâce à notre flamme de curiosité, nous avons tant appris. » [5].
Voir aussi
Liens internes
Liens externes
- Caractéristiques techniques sur le site de la NASA
- Page dédiée sur le site du CNES
- [3] et [4] Interview du responsable au CNES de la conception de l'outil CHEMCAM
Notes et références
- ↑ http://smsc.cnes.fr/MSL/Fr/GP_mission.htm La page du projet sur le site du CNES
- ↑ Spécifications du vaisseau sur le site de la Nasa
- ↑ Site NASA : Spacecraft: Entry, Descent, and Landing Configuration consulté le 17/2/2009
- ↑ Site NASA Mission Timeline: Entry, Descent, and Landing consulté le 17/2/2009
- ↑ . http://marsprogram.jpl.nasa.gov/msl/newsroom/pressreleases/20081204a.html
 Portail de la robotique
Portail de la robotique Portail de l’astronautique
Portail de l’astronautique Portail de l’astronomie
Portail de l’astronomie
Catégories : Exploration de Mars | Sonde spatiale | Robot scientifique | Événement à venir


Wikimedia Foundation. 2010.