- Exosquelette motorisé
-
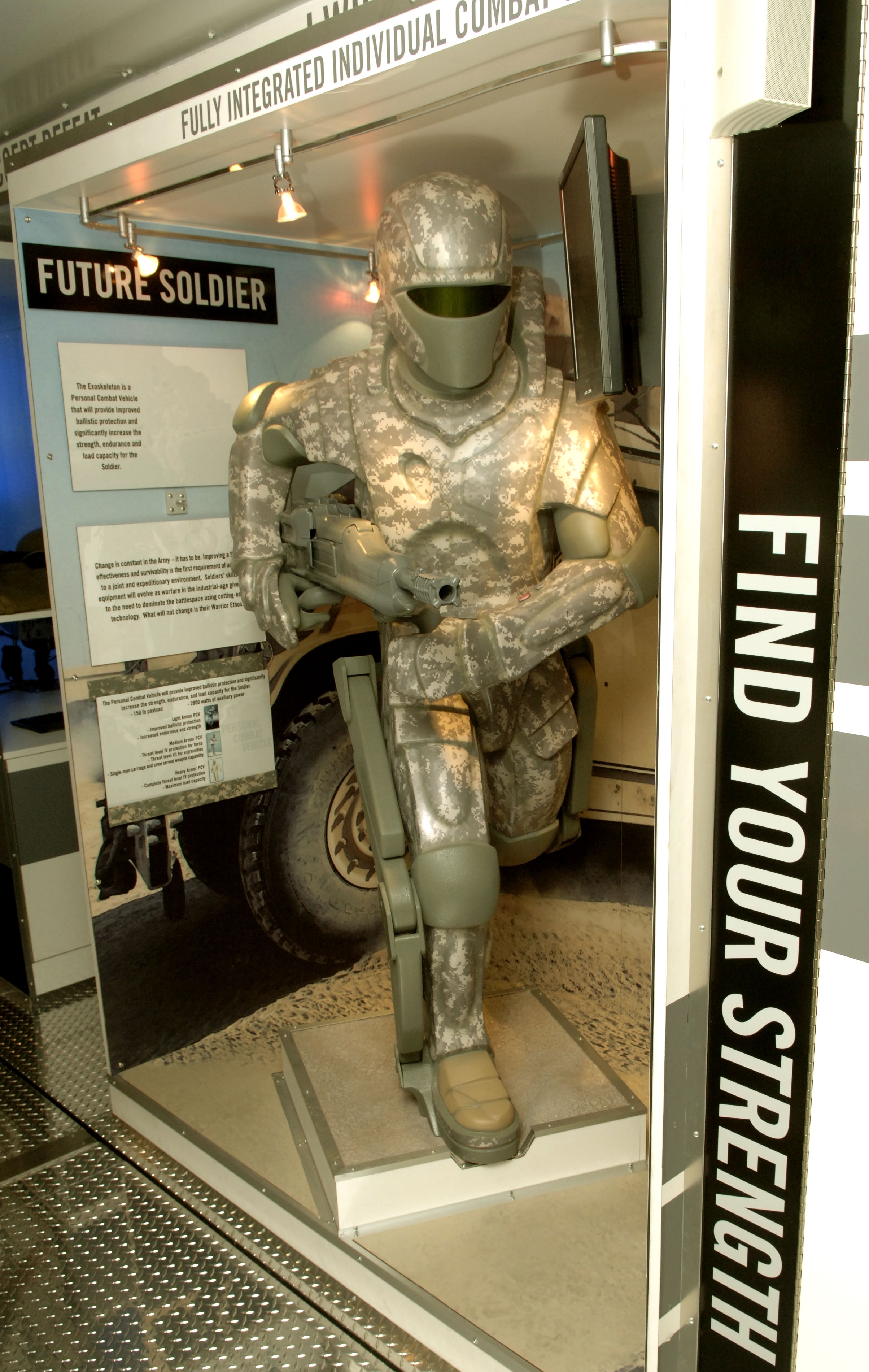
 Mannequin présentant le concept d'exosquelette motorisé tel qu'imaginé par l'armée américaine
Mannequin présentant le concept d'exosquelette motorisé tel qu'imaginé par l'armée américaine
Un exosquelette motorisé ou combinaison robotique est un dispositif mécatronique à base fixe ou mobile, composé d'une structure mécanique à plusieurs degrés de liberté, d'un système d'actionnement (électrique, hydraulique ou pneumatique) utilisant une source d'énergie embarquée ou déportée, et de cartes électroniques de puissance et de commande, que revêt un individu, à la manière d'un vêtement robotisé ou d'une prothèse externe (ou encore d'une cyberthèse), pour lui permettre de démultiplier ses capacités physiques (amplification), de simuler un retour d'effort dans un environnement virtuel (immersion), de rééduquer son système musculosquelettique (réhabilitation), de contrôler à distance des systèmes robotiques (téléopération) et éventuellement de le protéger de son environnement (à la manière d'une carapace ou d'un gilet par balle). L'inconvénient majeur des systèmes à base fixe est la limitation de l'espace de travail, l'avantage réside dans leurs motorisations déportées. L'inconvénient des systèmes mobiles est la faible autonomie énergétique mais qui est compensée par l'augmentation de leurs espaces de travail et donc de leurs degrés de mobilité. Certains systèmes à base fixe ou mobiles compensent leur friction interne et la gravité qu'ils génèrent, évitant ainsi aux utilisateurs de ressentir l'inertie et le poids de l'exosquelette qu'ils portent sur eux (on parle alors de qualité et de transparence de l'interfaçage exosquelettique).
Les exosquelettes motorisés sont encore à des stades préliminaires de conceptions (exemple le xos), de développements et de tests dans de nombreux centres de recherche publics ou privés notamment pour améliorer leur autonomie, bien que plusieurs prototypes soient déjà commercialisés (HAL5 de la société Cyberdyne et REX de la société REX Bionics) ou le seront prochainement (XOS2 de SARCOS, filiale de Raytheon et HULC de Berkeley Bionic en partenariat avec Lockheed Martin ou encore Rewalk de la société Argo Medical Technologies, etc.). Leurs applications prévues couvrent principalement les domaines militaires (manutention de charges lourdes) et médicaux (diagnostic et aide technique pour les handicapés moteurs, les personnes âgées ou accidentés).
Certains travaux concernent également des applications professionnelles comme la manipulation et l'assistance sur les lignes de production (guidage des gestes et des outils pour améliorer la production et réduire les troubles musculosquelettiques (TMS) ou encore la téléopération multi-échelles de machines (notamment dans les environnements spatiaux, nucléaires, chirurgicaux, marins, souterrains ou encore microscopique ou très lointain) et la conception avec retour haptique en environnement virtuel (bureau d'études, méthodes et design marketing) D'autres concernent des applications pratiques comme l'aide aux jardiniers (PAS, Professeur Shigeki Toyama de l’Université d’Agriculture et Technologie de Tokyo), ou ludiques en tant que joystick amélioré (XIO, Forcetek) ou à retour d'effort pour les jeux vidéo.
Dans le domaine militaire, on parle d'armure de combat robotisée ou du soldat du futur (DARPA) pour désigner les exosquelettes motorisés qui permettent d'amplifier et de protéger les soldats sur les champs de bataille. Dans le domaine médical, on utilise parfois les termes d'orthèses robotisées ou de cyberthèses (cité par l'EPFL, par la Fondation Suisse pour les Cyberthèses ou la société Swortec SA) pour désigner les exosquelettes motorisés utilisé dans le cadre de la kinésithérapie ou de la physiothérapie et qui permettent la rééducation motrice par stimulation neurofonctionnelle. Dans les domaines de l'immersion en réalité virtuelle ou de la téléopération, les termes utilisés sont plutôt "systèmes ou interfaces haptiques anthropomorphiques".
Sommaire
Les objectifs
L'exosquelette motorisé est fortement lié à la cybernétique et au transhumanisme, dont il peut être une des technologies représentatives des concepts. C'est une biotechnologie et/ou une technologie biomimétique, dans le sens où son objectif est d'optimiser les caractéristiques d'un organisme vivant, de le mouvoir et de le protéger à l'instar de son homologue naturel (exosquelette des arthropodes). Les grands domaines d'applications et de recherche, concernent la rééducation d'un homme ou d'une femme ayant subi un accident entraînant une paralysie momentanée ou permanente, l'amplification par la machine des capacités de l'homme « sain », l'immersion de l'homme dans une réalité virtuelle ou augmentée et la téléopération bidirectionnelle du couple homme/machine.
Dans le cadre de la rééducation
Le but de la rééducation est de restaurer les fonctions motrices d'origine d'un être humain, ou tout du moins d'atteindre le maximum de celles-ci après le traumatisme du corps. Couplé au système nerveux de l'utilisateur par des capteurs d'influx nerveux, l'exosquelette peut également suppléer aux fonctions motrices d'un patient paraplégique, et donner la possibilité de se mouvoir à des personnes paralysées ou handicapées dès la naissance. En tant qu'orthèse, l'exosquelette se différencie de la prothèse par le fait qu'il ne remplace par les membres puisqu'il les recouvrent : il est donc peu invasif, peut-être installé facilement par le patient et s'adapter à son domicile, sans conditions sanitaires spécifiques à respecter. En revanche les réglages de l'exosquelette ainsi que la mise au point, la validation et la surveillance des programmes de rééducation et d'apprentissage de la mobilité se feront généralement avec l'aide des médecins et des kinésithérapeutes, qui pourront alors diagnostiquer et télé-opérer l'évolution de la rééducation de leur patient à distance.
Ces améliorations concernent :
- Le recouvrement des capacités motrices d'un patient par un apprentissage robotisé progressif et continu.
- Le diagnostique en temps réel et à distance d'états médicaux grâce aux bio-senseurs embarqués et la connexion sécurisée au dossier médical du patient.
- La réduction de la pénibilité du travail physique.
Dans le cadre de l'amplification
Le but de l'amplification est de faire d'un être humain aux caractéristiques physiques et perceptives moyennes, un individu disposant de capacités qu'il ne pourrait avoir sans l'exosquelette et ses équipements embarqués. Dans cette optique, l'individu est considéré par les ingénieurs comme s'il était victime d'un handicap. Contrairement donc à la voie réparatrice, il ne s'agit pas là de « mettre à niveau » mais clairement d'amplifier.
Ces améliorations concernent :
- La force musculaire, la vitesse des mouvements et des réactions.
- La perception dite « classique » : acoustique, optique, haptique, gustative, olfactive.
- La perception dite « spécialisée » : Doppler, infrarouge, ultraviolet, ultrason, vision (lointaine, microscopique, périphérique, etc.)
- La précision des gestes et le guidage d'outils de travail : pour l'assemblage, la découpe, le soudage, la perforation, etc.
- La détection et la résistance à des risques nucléaires, biologiques, chimiques, etc.
- La résistance aux effets mécaniques (chocs, vibrations).
- La protection face aux environnements spéciaux : vide spatial, très haute pression, hautes températures, basses températures, fort niveau d'acidité ou environnement alcalin, chocs électriques, champs magnétiques, etc
Il existe évidemment d'autres améliorations possibles ; celles-ci sont néanmoins les plus représentatives des objectifs à court, moyen et long terme dans le cadre de l'amplification et de la protection. Enfin, dans un domaine plus prospectif, les inventeurs (dont Léonard de Vinci fut le précurseur) envisagent l'intégration d'un dispositif permettant au couple homme/robot de voler à la manière du Suisse Yves Rossi avec son JET Man (réalité) ou de Tony Stark avec son Iron Man (fiction).
Dans le cadre de l'immersion
Le but de l'immersion et de tromper les sens et de simuler les sensations de l'être humain. Un système d'immersion totale serait alors composé d'un exosquelette motorisé complet (c'est-à-dire corrélé parfaitement à la cinématique du corps humain), d'un casque de réalité virtuelle ou augmentée, d'écouteurs, d'un vaporisateur d'odeurs, d'une combinaison interne de stimulation tactile, et d'un simulateur de modalité spatiale (tapis roulant multi-directions ou sphère). L'exosquelette, pierre angulaire du système, permettrait alors à un individu d'être présent dans un environnement complétement artificiel.
Ces améliorations concernent :
- Le réalisme des jeux vidéo et des Serious Game (jeux de formation professionnelle) par l'ajout du sens kinesthésique (application d'un retour d'efforts sur les membres du joueur proportionnel au calcul de l'interaction (force, position) entre les membres du joueur et des objets tridimensionnels) .
- L'aide à la décision en situation réelle ou virtuelle grâce à des capacités de calcul embarquées ou connectées, d'outils de communication, d'outils d'aide à l'analyse en temps-réel de situation ou d'aide à l'ordonnancement d'activités et d'outils logiciels et environnements informatiques divers.
Dans le cadre de la téléopération
Le but de la téléopération est de permettre à l'être humain d'interagir directement sur un environnement distant (généralement hostile). L'exosquelette motorisé (maître) permet alors à un individu de commander un bras robotique (esclave) et de ressentir les efforts exercé par l'effecteur esclave. Mais la téléopération exosquelettique peut également être bidirectionnelle, c'est-à-dire que l'exosquelette d'un utilisateur peut être commandé à distance.
Ces améliorations concernent :
- La téléopération d'outils à distance : systèmes robotiques, domotiques, etc.
- L'interfaçage homme/machine universel
- Télé-assistance robotique (voir rééducation)
Les applications possibles
L'exosquelette n'est pas réduit à ses seules applications militaires et médicales, bien que celles-ci soient celles qui sont les plus souvent médiatisées. Un exosquelette peut être utilisé dans tous les domaines où les performances physiques et/ou cognitives d'un individu sont primordiales à la réussite d'un objectif.
Les champs d'applications possibles sont les suivants :
Pour la police et les services d'ordre
Dans le cadre policier, il servirait à réduire le risque couru par un agent des forces de l'ordre (blindage, vitesse, force, précision, perceptions accrues), voire en limitant les risques de dommages collatéraux (supervision et téléopération à distance des agents munis de leurs exosquelettes par leurs supérieurs ou par de simples citoyens par exemple). Un agent d'intervention équipé d'un tel dispositif serait en mesure d'obtenir les résultats d'un collègue non équipé avec une fatigue moindre, une plus grande rapidité, mais aussi de parvenir à résister à la plupart des assauts des personnes ne possédant pas d'exosquelette ou ayant des exosquelettes moins puissants.
Enfin, les capacités de perception embarquées sur l'exosquelette motorisé, couplées à des capacités d'analyse d'images et de données issus de capteurs divers radar, sonar, détecteur de mouvement, etc.), peuvent permettre la détection et la gestion de menaces comme la reconnaissance locale et en temps réel de personnes recherchées ou à risques se dissimulant dans une foule ou la détection d'explosifs, d'armes ou produits dangereux (nucléaire, biologique et chimique), ainsi que la plupart des dangers auxquels sont habituellement confrontés les forces de l'ordre dans le cadre de leurs opérations.
Pour les pompiers
Les pompiers courent au moins autant de risques lors de leurs interventions que les services de maintien de l'ordre ; néanmoins, leurs demandes ne sont pas les mêmes. Dans un cadre opérationnel, l'exosquelette pour pompiers leur permettrait de porter plus facilement des charges lourdes (victimes ou matériel de secours), de passer plus facilement les obstacles (portes, murs) et d'augmenter leurs capacités de réactions et de coordination tout en fournissant une protection accrue contre les hautes températures et les environnements toxiques et enfumés.
Quelques avantages d'un exosquelette pour les pompiers :
- L'augmentation de la force facilite l'élimination et le franchissement des obstacles, l'excavation en cas d'effondrement mais aussi la récupération des victimes inconscientes, ou le transport d'oxygène ou d'eau en plus grande quantité.
- Un exosquelette peut être conçu spécifiquement pour transporter des lances à incendie d'une puissance et d'une efficacité sans communes mesures avec les capacités d'intervention actuelles.
- Il peut être aussi équipé de tout élément simplifiant la recherche et la détection de victimes, et équipé de capteurs spécifiques capables de détecter des fuites de gaz mêmes infimes, mais aussi des contaminations biologiques et chimiques.
- La protection fournie par l'exosquelette peut enfin être adaptée aux types d'environnements (feux de forêt, fuite d'une centrale nucléaire, grisou dans une mine, avalanche en montagne, etc.).
Pour les travailleurs sur les chantiers
Le domaine du bâtiment est sérieusement envisagé dans les applications possible de l'exosquelette robotisé, principalement grâce à l'augmentation de la force et de la précision, indispensable sur un chantier, et souvent dans des conditions rendant complexe l'emploi d'une machine plus volumineuse. Ainsi, le travail sur gros œuvre, en tunnel, la réparation de sites contaminés, mais aussi l'usage d'outils complexes en situation inconfortable (espace réduit, faible luminosité, basse ou haute pression, environnement à risque) sont des champs d'applications dans lesquelles l'exosquelette pourrait devenir une aide appréciable. En outre, l'exosquelette peut faciliter la prise de mesure, grâce à son positionnement GPS et à ses appareillages de mesures embarqués (instrumentation laser) ou ses modules d'aide à la décision et de suivi de la construction (superposition des plans de conception tridimensionnels de l'édifice à la réalité du terrain). Enfin un exosquelette de chantier pourrait permettre la téléopération des machines telles que : pelles hydrauliques, foreuses, grues et autres systèmes fréquemment utilisés sur les chantiers.
Pour les sportifs
Un exosquelette motorisé peut permettre le monitoring et l'assistance robotisée de l'entraînement sportif (atteindre le geste parfait avec la force, la vitesse et la précision adéquate)[réf. nécessaire].
Pour le grand public
L'exosquelette est un outil dont la vocation est d'être utilisé par un large public et est donc de plus en plus étudié par les laboratoires universitaires et centres de recherche mondiaux. Sans forcément avoir la puissance des modèles militaires et professionnels mais en intégrant des fonctionnalités électroniques ou informatiques développées par ailleurs, ils serviraient alors à :
- Faciliter l'activité physique et la manipulation de charges ou d'objets encombrants par l'augmentation des facultés psychomotrices (force, endurance, vitesse, précision) tout en réduisant les risques des travaux domestiques (bricolage, jardinage, déménagement).
- Faciliter l'apprentissage du l'activité (transfert d'un savoir-faire manuel enregistré par un expert et rejoué par un néophyte, ou simulation de l'activité dans un environnement immersif calqué sur la réalité)
- Faciliter l'évaluation et le suivi de la santé en embarquant des dispositifs médicaux capables de diagnostiquer en temps réel l'état physiologique ou neurologique ou intervenant directement (premiers secours) en cas d'hypertension, d'hypotension, de défibrillation, etc.
- Faciliter l'aide à la décision en augmentant les facultés perceptives d'un utilisateur (haptique : kinesthésique et tactile, vision, ouïe)
- Faciliter l'interfaçage homme-machine pour commander des systèmes robotisés (aspirateur, tondeuses, humanoïdes, systèmes domotiques).
- Faciliter l'utilisation du web (navigation via des métaphores sensorielles), d'environnements virtuels ou de la réalité augmentée en augmentant les sensations d'immersion et les capacités d'interactions.
Comme toutes les machines, un exosquelette peut être l'objet d'un tuning et être sujet à de nombreuses modifications esthétiques qui pourrait le rendre de plus en plus visible et différencié dans des manifestations sportives, culturelles et artistiques où la représentation est importante (cinéma, théâtre, etc.). Car en tant que machine et en tant que vêtement, il peut être personnalisé par son utilisateur, et donc intégrer à la fois les évolutions technologiques de ces composants internes (batteries, microprocesseurs, moteurs, etc.) mais également les évolutions de la mode pour ces composants externes (couleurs, formes et textures des coques de protection par exemples).
Développements actuels
XOS
Article détaillé : XOS.La DARPA (Defense Advanced Research Projects Agency) aux États-Unis est un des premiers organismes à avoir travaillé sur les exosquelettes motorisés. Il s'agissait de pouvoir faciliter le travail des militaires sur les zones de combat. Les premiers prototypes réalisés utilisaient généralement une source d'énergie externe et un défi important consistait à pouvoir embarquer cette source d'énergie afin de rendre autonome le dispositif. En 2000, la DARPA a mis en concurrence seize sociétés afin de sélectionner un exosquelette à tester en 2008. Le projet retenu est celui mis au point par la société Sarcos qui est depuis devenue une filiale de la société Raytheon. Le premier prototype issu de ces recherches, appelé XOS est un exosquelette complet avec un système d'actionnement hydraulique haute pression (membres inférieurs et supérieurs) développé pour l'armée américaine. Il pèse plus de 70 kg, et permet de soulever des charges pouvant aller jusqu'à 90 kg à bout de bras[1]. La seconde version XOS2 a été endurcie et considérablement allégée puisqu'elle ne pèse plus qu'une dizaine de kilos.
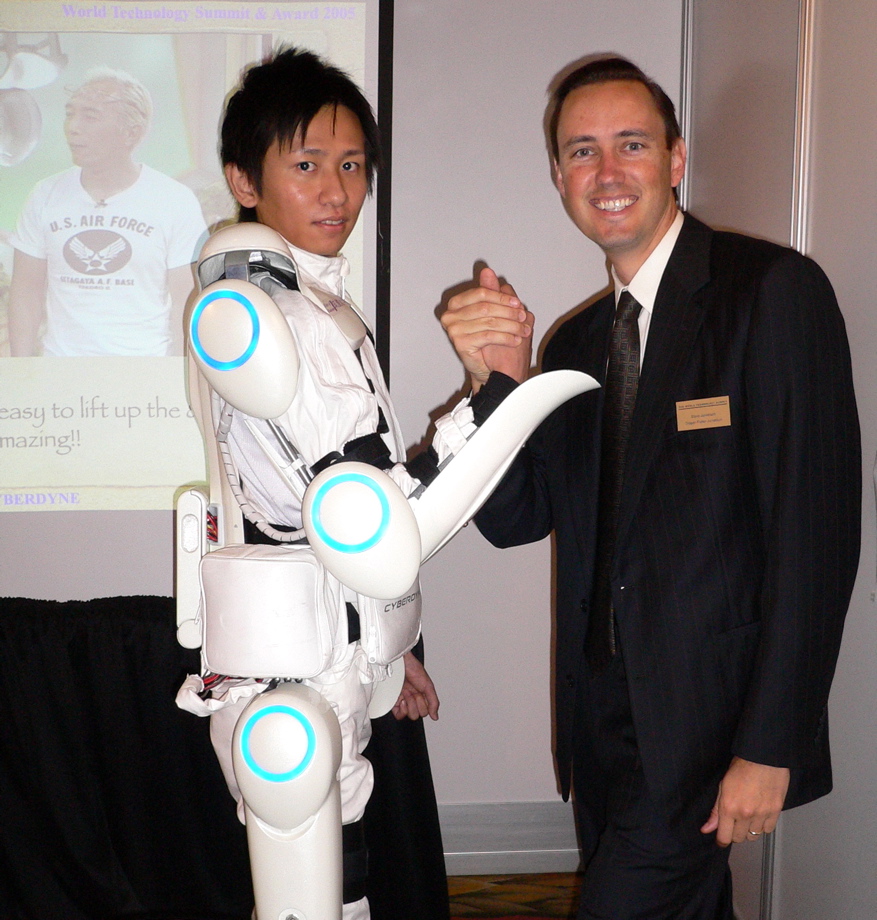
HAL
 HAL-5Article détaillé : Hybrid assistive limb.
HAL-5Article détaillé : Hybrid assistive limb.Le fondateur, le professeur Yoshiyuki Sankai, de la société japonaise Cyberdyne (référence au film Terminator), une spin-off de l’université de Tsukuba au Japon, a développé un exosquelette motorisé destiné exclusivement à aider les personnes ayant des difficultés à se mouvoir (personnes âgées ou handicapés moteurs), dénommé HAL (pour « Hybrid Assistive Limb »). Cet exosquelette est disponible à la location (1000 €/mois) au Japon depuis 2009 et bientôt à la vente (12000 €). (http://www.cyberdyne.jp/english/). Une succursale a été ouverte aux pays-bas et un centre de recherche (Cybernetics), co-financé par Daiwa House, a été ouvert au Japon.
Probex
En France, la société Wotan Systems a été créée en 2004 pour développer des exosquelettes de compensation du handicap. Ses premiers projets concernent les membres supérieurs avec un exosquelette pour le bras droit dénommé Probex et notamment Probex201 intégré à un fauteuil roulant. Cette société a cependant été liquidée en 2009 pour insuffisance d'actifs[2].
ReWalk
La société israélienne Argo Medical Technologies a développé un exosquelette motorisé léger, nommé ReWalk, dont le but est de permettre aux paraplégiques de marcher. ReWalk possède des attelles articulées qui viennent s'attacher sur les membres inférieurs de l'utilisateur et un sac dorsal qui contient le système de contrôle[3]. Un capteur est placé sur le torse de l'utilisateur, il détecte l’angle du torse et pilote les jambes vers l'avant ou l'arrière afin de maintenir l’équilibre du corps.
Body Extender
Le laboratoire PERCRO en Italie a développé le L-EXOS, dispositif haptique anthropomorphique à base fixe, puis plus récemment le Body Extender, exosquelette complet destiné à la manutention basé sur la technologie de transmission à câble du L-EXOS.
REX
Rex Bionics est une entreprise fondée par Richard Little and Robert Irving en 2007 qui conçoit un exosquelette pour les membres inférieurs à destination des personnes paraplégiques mesurant entre 1,50 m et 1,95 m et pesant moins de 100 Kg.
Caractéristiques du prototype : masse = 38 Kg, environ deux heures d’autonomie, quatre degrés de liberté (deux par membres), contrôle par joysticks. Produit commercialisé en Nouvelle Zélande (85 000 €) et disponible dans les autres pays à partir de 2011.
Dans la fiction
Le principe de l'exosquelette est très souvent utilisé dans les œuvres de science-fiction, surtout dans les jeux vidéo. Les premières apparitions d'un tel équipement peuvent être décelées dans le roman de science-fiction « Patrouille galactique » (Galactic Patrol) écrit en 1937 par E. E. Smith ou encore dans le célèbre Starship Troopers (1959) de Robert A. Heinlein. Mais en remontant plus loin dans le passé, on peut aussi évoquer les contes de Charles Perrault dans lesquels certains personnages, comme le Petit Poucet, utilisent des bottes de sept lieues, un équipement imaginaire qui s'adapte automatiquement en taille à son utilisateur et qui permet d'augmenter considérablement la distance parcourue à chaque pas. De la même façon, les ailes artificielles de Dédale et d'Icare sont aussi révélatrices des rêves anciens d'amélioration du corps humain.
Parmi les héros de science-fiction qui utilisent des exosquelettes motorisés, un des plus connus est certainement Iron Man, le héros de bande dessinée créé en 1963 par Stan Lee pour Marvel Comics et qui a été adapté au cinéma en 2008 par Jon Favreau. À noter aussi de nombreux systèmes exosquelettiques dans les jeux video : le Costume de Puissance la série Metroid , les MJOLNIR de la série Halo, la Nano-Combinaison de Crysis, et dans bien d'autes comme Metal Gear ou Fallout.
L'exosquelette ne doit pas être confondu avec le concept de Mecha, que l'on peut voir dans de nombreux films, animes et mangas comme Gundam, qui même s'ils sont une évolution du concept, n'en ont pas les caractéristiques. En effet, là où un exosquelette est "vêtu" par l'utilisateur, en se superposant à ses mouvements et en l'appuyant à l'aide d'outils d'interface immersive. Un Mécha est piloté, c'est donc un véhicule anthropomorphe.
Notes et références
- (en)Gregory Mone, Building the Real Iron Man, article publié dans le numéro de mars 2008 de la revue Popular Science, (disponible en ligne)
- Selon le site http://www.societe.com
- (en)Ranit Mishori, A Human Exoskeleton, article publié sur le site du Washington Post le 06/05/2008 (disponible en ligne)
Voir aussi
Articles connexes
Liens externes
- Site web de la société Sarcos
- Site web de la société Cyberdyne
- Site web de la société Argo Medical Technologies
- http://www.fsc-sfc.org/
- http://www.rexbionics.com/
- http://www.swortec.ch/index.php?page=about
- http://www.cybernics.tsukuba.ac.jp/index.html
- http://www.berkeleybionics.com/
- http://psuf.panasonic.co.jp/alc/en/index.html
- http://brahma.robot.jussieu.fr/
- http://www.ulb.ac.be/scmero/documents/Research/haptic/haptic.html
- http://www.percro.org/
- http://www.haption.com/site/eng/index.html
Wikimedia Foundation. 2010.