- Hybrid assistive limb
-
HAL ou Hybrid Assistive Limb (en français : Membre d'assistance hybride) est un exosquelette motorisé développé par la société japonaise Cyberdyne, une spin-off de l’Université de Tsukuba et destiné à aider les personnes ayant des difficultés à se mouvoir (personnes âgées ou handicapées). Le fonctionnement de HAL repose sur un système hybride qui utilise d'une part la détection des très faibles signaux biologiques que le cerveau envoie aux muscles par l'intermédiaire des motoneurones et d'autre part un système autonome robotique.
Sommaire
Développements
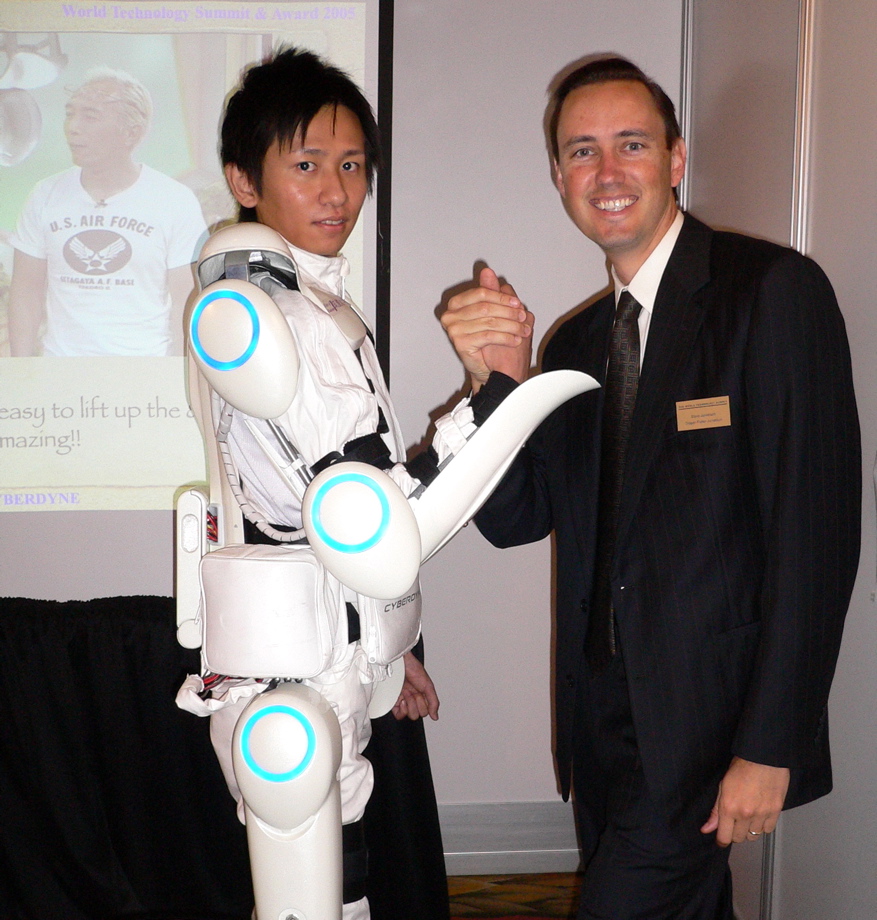
 HAL 5
HAL 5
Le responsable du développement de HAL est le professeur Yoshiyuki Sankai de l'université Tsukuba. Deux prototypes ont été construits par Cyberdyne :
- HAL 3 ne possède que des jambes et ses servo-moteurs sont relativement encombrants.
- HAL 5, plus complet, possède des jambes, des bras et un torse.
Un laboratoire de recherche et développement ainsi qu'une unité de production de HAL, ont été mis en service en octobre 2008 à Tsukuba, la construction avait démarré le 16 avril de la même année. La capacité de production est de 500 exosquelettes par an.
Caractéristiques techniques
Les caractéristiques suivantes concernent le modèle HAL-5 type B :
- Taille : 1,60 mètre
- Poids : 23 kg (partie inférieure : 15 kg)
- Source d'énergie : batterie de 100 volts
- Autonomie : environ 2 h 40 min en fonctionnement continu, 5 h, d'après Cyberdyne, pour une utilisation normale
- Mouvements possibles : activités quotidiennes (se lever d'une chaise, marcher, monter et descendre des escaliers, soulever et porter des objets lourds)
Fonctionnement
Une des originalités de HAL consiste à utiliser deux systèmes de contrôle différents pour décider des mouvements à accomplir, d'où l'appellation « hybride », ces systèmes sont utilisés en fonction des situations[1] :
- Contrôle cybernétique volontaire (ou système de contrôle biocybernétique)
- Quand un individu essaye de faire une action, par exemple de marcher, son cerveau envoie des signaux électriques aux muscles concernés. Quand ces signaux arrivent aux muscles, de faibles signaux bioélectriques apparaissent à la surface de la peau. HAL est équipé de capteurs spécifiques en contact avec la peau de l'utilisateur qui détectent ces signaux et les transmettent au processeur qui détermine immédiatement la puissance que l'utilisateur va générer et calcule la puissance d'assistance adéquate à apporter. Le processeur commande alors les unités motrices qui vont générer l'énergie nécessaire et mettre les membres en action. L'ensemble de ce processus est réalisé avant que les muscles de l'utilisateur n'entrent effectivement en mouvement.
- Système de contrôle autonome robotique
- Une action humaine volontaire (par exemple, se lever d'une chaise) peut être décomposée en plusieurs mouvements élémentaires qui sont exécutés en séquence. HAL dispose d'une base de données dans laquelle tous ces mouvements élémentaires sont stockés et reliés aux actions correspondantes. HAL peut ainsi coordonner tous les mouvements élémentaires pour produire une action. À noter que la base de données est mise à jour automatiquement grâce aux capteurs en contact avec la peau de l'individu.
- En cas de difficultés à détecter les signaux bioélectriques, HAL peut être utilisé selon ce système autonome.
Utilisation
HAL a été spécifiquement développé pour pouvoir faciliter la vie des personnes ayant des difficultés à se mouvoir ou à soulever des objets lourds. La cible envisagée comprend notamment les personnes âgées et les handicapés.
Le promoteur immobilier japonais Daiwa House Industry a décidé de financer la R&D de Cyberdyne à hauteur d'un milliard de yens en 2008. Il envisage d'utiliser HAL dans les maisons de personnes âgées qu'il fait construire.
Une cinquantaine d'hôpitaux et de maison de repos au Japon utilisent en 2010 une version de HAL pour les jambes pour 150 000 yens (environ 1 350 euros) par mois et par appareil[2]. Des établissements de Suède et Danemark prévoient de le tester[2]. La variante intégrale devrait être proposée en 2011 aux professionnels, et la vente aux particuliers est prévue pour 2015[2].
Notes et références
- (en)HAL : Hybrid Control System sur le site web de Cyberdyne
- Miwa Suzuki, « HAL: un exosquelette robotique pour donner force et courage aux humains », AFP sur Google News, le 12 décembre 2010
Voir aussi
Article connexe
Liens externes
- (ja)(en) Site web de la société Cyberdyne
- (en)Japan's future: robots in retirement homes ?, article publié dans la revue JETRO (Japan External Trade Organization) Geneva Newsletter, juillet 2009, p.4
Wikimedia Foundation. 2010.