- État de déformation
-
Tenseur des déformations
Articles scientifiques
sur les tenseursGénéralitésMathématiquesTenseur (mathématiques)
Produit tensoriel
... de deux modules
... de deux applications linéaires
Algèbre tensorielle
Champ tensoriel
Espace tensorielPhysiqueConvention d'Einstein
Tenseur métrique
Tenseur énergie-impulsion
Tenseur de Riemann
... de Ricci
... d'Einstein
... de Weyl
... de Levi-Civita
... de Killing
... de Killing-Yano
... de Bel-Robinson
... de Cotton-York
Tenseur électromagnétique
Tenseur des contraintes
Tenseur des déformationsArticles connexesPortail des MathématiquesPortail de la PhysiqueLe tenseur des déformations, est un tenseur symétrique d'ordre 2 servant à décrire l'état de déformation local résultant de contraintes (efforts internes).
L'état de déformation d'un solide est décrit par un champ de tenseur, c'est-à-dire que le tenseur des déformations est défini en tout point du solide. On parle de ce fait de champ de déformation.
Les composantes sont notées εij, avec :
- les termes diagonaux εii sont les allongements relatifs dans la direction i (selon l'axe xi) ;
- les autres termes εij (i ≠ j) sont les γ, les demies variations de l'angle droit (en supposant un petit volume de matière cubique avant déformation).
Dans le cadre de l'élasticité linéaire, le tenseur des déformations est relié au champ de contrainte par la loi de Hooke généralisée.
Sommaire
Champ de déplacement
Dans le cas de petites déformations, ce tenseur est le tenseur de Green, un tenseur dérivé du champ de déplacement.
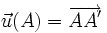
Soit A un point du solide au repos ; après déformation, il devient le point A' . On appelle déplacement du point A le vecteur
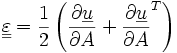
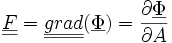
On peut relier le tenseur des déformations au champ de déplacement :
 (Opérateur des déformations linéarisé).
(Opérateur des déformations linéarisé).
Définition de l'opérateur des déformations
Allongement uni-dimensionnel
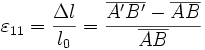
Prenons le cas d'un segment [AB], parallèle à l'axe x1, devenant le segment [A'B' ], la déformation étant également parallèle à x1.
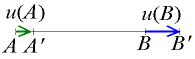
La déformation ε11 vaut (exprimée en distances algébriques) :
Sachant que
 et
et 
la déformation vaut donc
Si l'on se place en petites déformations, on peut faire le développement limité du premier ordre de u1 :
et ainsi
De manière plus générale :
Cisaillement pur
Considérons maintenant du cisaillement pur. Un carré ABCD, où [AB] est parallèle à x1 et [AD] est parallèle à x2, se transforme en un losange AB'C'D' , symétrique selon la première bissectrice du plan.
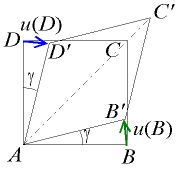
La tangente de l'angle γ vaut :
 .
.
Pour les petites déformations, on a
ainsi que
avec u2(A) = 0. Ainsi,
Si l'on considère maintenant le segment [AD] :
et ainsi
L'intérêt de faire la moyenne apparaît si l'on fait tourner le losange, il faut alors définir deux angles
 et
et  .
.
Note : dans l'article Déformation élastique, l'angle γ défini vaut le double de l'angle défini ici.
Définition générale
L'opérateur des déformations est un opérateur visant à caractériser en un point la déformation du milieu, c’est-à-dire la variation de longueur d'un segment suite à la transformation subie par le milieu.
On considère le segment AB qui se transforme en A' B'. Cet opérateur permet de quantifer |A' B'|²-|AB|².
On décrit la transformation de chaque point du milieu par une fonction (suffisamment régulière) :
 telle que
telle queOn introduit alors le concept de déformation, pour mesurer la variation de distance entre deux points du solide suite à la transformation
 .
.On cherche à avoir une mesure de |A' B'|²-|AB|².
Or on a
On peut donc écrire :
où
est le gradient de la transformation.
On obtient donc :
On pose :

 est l'opérateur des déformations de Green-Lagrange
est l'opérateur des déformations de Green-LagrangeSi on introduit le vecteur déplacement
 on obtient :
on obtient :
Si l'on fait l'hypothèse des petites déformations, on obtient l'opérateur des déformations linéarisé :
Variation de volume relative
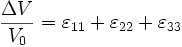
La variation de volume relative ΔV/V0 est la trace du tenseur :
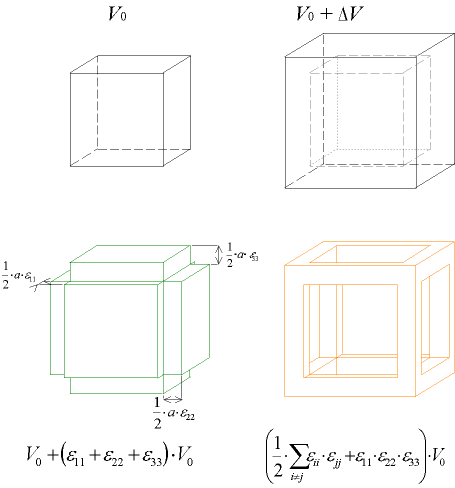
En effet, si l'on considère un cube d'arrête a, après déformation on a un quasi-cube (les variations d'angle ne changent pas le volume) de dimension
 et V0 = a3, soit
et V0 = a3, soitcomme on est en très faible déformation,
- 1 >> ε ii >> ε ii·ε jj >> ε11·ε22·ε33
d'où le résultat.
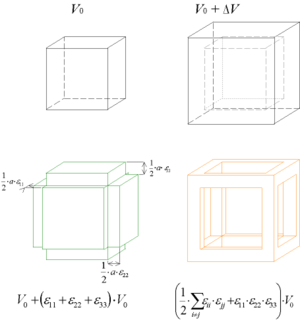
Variation de volume réelle (haut) et approchée (bas) : le dessin en vert montre le volume estimé et le dessin en orange le volume négligéOn en déduit que dans le cas du cisaillement pur, il n'y a pas de variation de volume.
De manière plus rigoureuse, la variation de volume relative ΔV/V0 est égale à |F|-1.
En effet, soit le prisme de Ω0 élémentaire engendré par (u10,u20,u30). Sa transformée par Φ est le prisme engendré par (u1,u2,u3).
Soit dV le volume de la transformée, et dV0 celui du prisme initial.
On a
d'où ΔV/V= |F|-1
Voir aussi
Liens externes
- Déformations très petites d'un corps solide., É. Mathieu (1835-1890), Traité de physique mathématique (sur Gallica)
- tenseurs contrainte/déformation - loi de comportement élastique isotrope, orthotrope manuel de référence du logiciel de calcul de structure ICAB Force
 Portail de la physique
Portail de la physique
Catégories : Mécanique des milieux continus | Tenseur












Wikimedia Foundation. 2010.