- Géométrie Symplectique
-
Géométrie symplectique
La géométrie symplectique est un domaine actif de la recherche mathématique, né de la volonté d'une formulation mathématique naturelle à la mécanique classique. Elle est à la rencontre de la géométrie différentielle et des systèmes dynamiques. En mathématiques, elle trouve des applications en géométrie algébrique, en géométrie riemannienne et en géométrie de contact. Formellement, elle est définie comme l'étude des « 2-formes différentielles fermées non dégénérées » — appelées formes symplectiques — sur les variétés différentielles[1].
Sommaire
Étymologie, histoire de la terminologie
L'adjectif symplectique fut introduit par le mathématicien Hermann Weyl (9 novembre 1885 – 8 décembre 1955) pour désigner le groupe symplectique Sp(2n), le groupe des automorphismes linéaires réels de Cn conjuguant la multiplication par i à elle-même. Ce groupe était appelé « groupe du linéaire complexe » et une confusion était possible avec le groupe des automorphismes linéaires complexes. Hermann Weyl justifie son choix :
«The name “complex group” formerly advocated by me in allusion to line complexes, as these are defined by the vanishing of antisymmetric bilinear forms, has become more and more ambarrassing through collision with the word “complex” in the connotation of complex number. I therefore propose to replace it by the corresponding Greek adjective “symplectic”.
»
(Le nom « groupe complexe » que j'ai précédemment évoqué en allusion à la droite complexe, est devenu de plus en plus embarrassant par l'usage de « complexe » dans l'expression « nombre complexe ». Je propose donc de le remplacer par l'adjectif grec correspondant « symplectique ».)— Hermann Weyl, The classical Groups. Their Invariants and Representations
Plus exactement, l'adjectif « symplectique » est basé sur la racine grecque συµπλεκτικoς, traduction de la racine latine de complexus. La racine latine a donné le nom de complexité d'où dérive « nombre complexe », ce nom latin traduit l'idée d'entrelacement. En histoire naturelle, l'adjectif symplectique désigne « être entrelacé avec un autre corps ».
Par extension, l'adjectif symplectique a été utilisé dans l'appellation de forme symplectique et de variété symplectique (voir définitions ci-dessous).
Motivations
Mécanique classique et formalisme hamiltonien
Le cadre de la géométrie symplectique a permis de donner un nouveau regard sur la mécanique classique. Elle permet une étude du comportement global d'un système mécanique, de traiter les symétries et leurs conséquences et d'étudier des questions qualitatives comme par exemple l'existence de trajectoires périodiques ou le caractère chaotique ou stable d'une évolution.
En mécanique, la position d'un ensemble de points matériels ou plus généralement d'un objet en mouvement est traditionnellement repérée par un certain nombre de coordonnées curvilignes
 . Le nombre n est appelé nombre de degrés de liberté du système. Par exemple, un pendule astreint à rester dans un plan est repéré par un seul paramètre q1, à savoir l'angle que fait sa tige avec la verticale définie par le champ de gravité. Les positions occupées par deux masses ponctuelles en interaction (par exemple une planète et une étoile) sont repérées par six paramètres, trois pour chaque masse. L'ensemble des différentes valeurs
. Le nombre n est appelé nombre de degrés de liberté du système. Par exemple, un pendule astreint à rester dans un plan est repéré par un seul paramètre q1, à savoir l'angle que fait sa tige avec la verticale définie par le champ de gravité. Les positions occupées par deux masses ponctuelles en interaction (par exemple une planète et une étoile) sont repérées par six paramètres, trois pour chaque masse. L'ensemble des différentes valeurs  que les coordonnées peuvent prendre dans toutes les positions possibles du système est appelé espace de configuration. Les lois de Newton de la mécanique affirment (entre autres choses) qu'un système mécanique évolue d'une façon déterministe qui peut être prévue si on connait la position et la vitesse d'un point à l'instant initial.
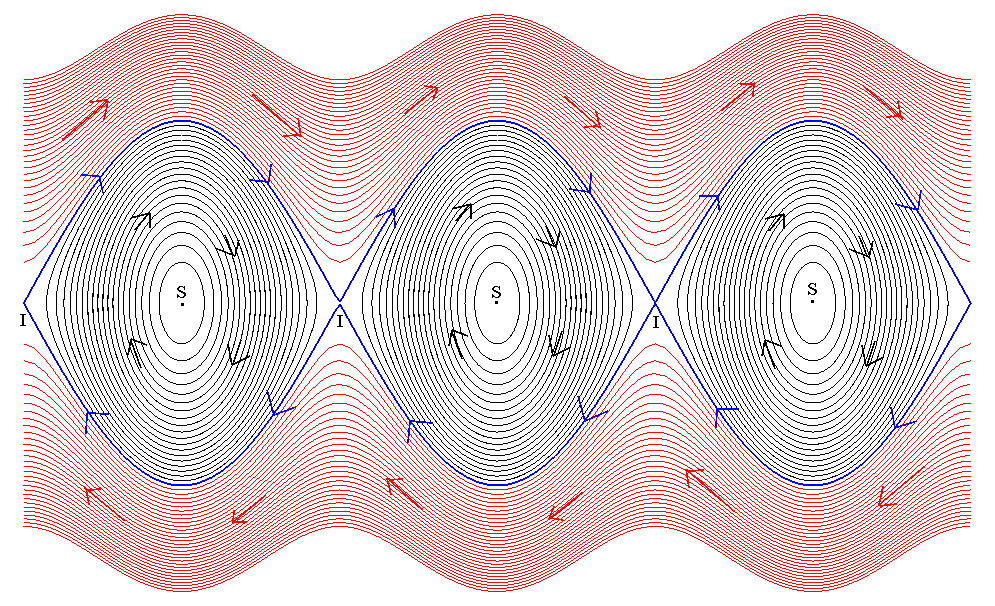
que les coordonnées peuvent prendre dans toutes les positions possibles du système est appelé espace de configuration. Les lois de Newton de la mécanique affirment (entre autres choses) qu'un système mécanique évolue d'une façon déterministe qui peut être prévue si on connait la position et la vitesse d'un point à l'instant initial.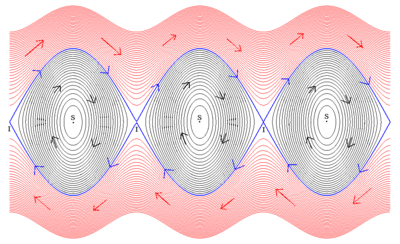 Espace des phases du pendule simple
Espace des phases du pendule simple
Pour prendre en compte les vitesses, il est nécessaire d'ajouter aux coordonnées de position n nouvelles variables
 . Dans le premier exemple, p1 serait la vitesse angulaire du pendule et dans le deuxième, on aurait les composantes de la vitesse des deux planètes. L'ensemble des valeurs
. Dans le premier exemple, p1 serait la vitesse angulaire du pendule et dans le deuxième, on aurait les composantes de la vitesse des deux planètes. L'ensemble des valeurs  que peuvent prendre les différents paramètres est appelé espace des phases du système. Les trajectoires du système se tracent dans cet espace.
que peuvent prendre les différents paramètres est appelé espace des phases du système. Les trajectoires du système se tracent dans cet espace.Bien sûr, il n'est en général pas possible de calculer explicitement toutes les trajectoires possibles et même un tel calcul ne donne pas forcément une bonne idée globale du comportement du système étudié. Pour comprendre ce comportement on peut essayer de suivre le déplacement d'un sous-ensemble de l'espace des phases, on a alors accès à des informations globales et qualitatives.
Dans toute la suite on suppose que le système évolue en suivant les lois de la mécanique de Newton pour des forces dérivant d'un potentiel (ce qui signifie en simplifiant qu'il n'y a pas de frottements). On peut se demander quel type de géométrie est adapté à cette étude des trajectoires dans l'espace des phases. La géométrie euclidienne est la plus familière mais elle n'est pas adaptée car les droites ne sont pas conservées lors de l'évolution d'un système mécanique. Ainsi dans l'exemple du pendule simple on constate que si l'on part de configurations alignées cette propriété se perd en route. Il y a pire, un segment de droite n'est même pas envoyé sur une courbe de même longueur. Dans la suite on verra que la géométrie pertinente est la géométrie symplectique.
Optique géométrique
Ce chapitre est une présentation élémentaire de la géométrie symplectique. Le fil conducteur choisi est l'idée que la géométrie symplectique est le cadre géométrique naturel de la mécanique classique. Ce cadre permet en particulier d'étudier le comportement global d'un système mécanique, de traiter les symétries et leurs conséquences et d'étudier des questions qualitatives comme par exemple l'existence de trajectoires périodiques ou le caractère chaotique ou stable d'une évolution. Cette approche privilégie donc les liens qu'entretient cette géométrie avec la physique et les systèmes dynamiques mais des questions plus purement mathématiques et des liens avec d'autres géométries seront aussi présentés.
En mécanique on repère la position d'un système par un certain nombre de coordonnées
. Par exemple un pendule astreint à rester dans un plan sera repéré par un seul nombre q1 qui sera l'angle que fait sa tige avec la verticale. La position occupée par deux planètes dans le système solaire pourra être repérée par six nombres, un pour chaque coordonnée spatiale de chacune des planètes. L'ensemble des nombres décrivant les positions possibles d'un système est appelé espace de configuration du système. Les lois de Newton de la mécanique affirment (entre autres choses) qu'un système mécanique évolue d'une façon déterministe qui peut être prévue si on connait la position et la vitesse d'un point à l'instant initial. Pour prendre en compte les vitesses on ajoute donc n nouvelles variables  . Dans le premier exemple p1 serait la vitesse angulaire du pendule et dans le deuxième on aurait les composantes de la vitesse des deux planètes. L'ensemble des nombres possibles est appelé espace des phases du système. Le nombre n est appelé nombre de degrés de liberté du système.
. Dans le premier exemple p1 serait la vitesse angulaire du pendule et dans le deuxième on aurait les composantes de la vitesse des deux planètes. L'ensemble des nombres possibles est appelé espace des phases du système. Le nombre n est appelé nombre de degrés de liberté du système.Dans cet espace on peut dessiner toutes les trajectoires du système en partant de n'importe quel point avec n'importe quelle vitesse.
Bien sûr, il n'est en général pas possible de calculer explicitement toutes les trajectoires possibles et même un tel calcul ne donne pas forcément une bonne idée globale du comportement du système étudié. Pour comprendre ce comportement on peut essayer de suivre le déplacement d'un sous-ensemble de l'espace des phases, on a alors accès à des informations globales et qualitatives.
Dans toute la suite on suppose que le système évolue en suivant les lois de la mécanique de Newton pour des forces dérivant d'un potentiel (ce qui signifie en simplifiant qu'il n'y a pas de frottements). On peut se demander quel type de géométrie est adapté à cette étude des trajectoires dans l'espace des phases. La géométrie euclidienne est la plus familière mais elle n'est pas adaptée car les droites ne sont pas conservées lors de l'évolution d'un système mécanique. Ainsi dans l'exemple du pendule simple on constate que si l'on part de configurations alignées cette propriété se perd en route. Il y a pire, un segment de droite n'est même pas envoyé sur une courbe de même longueur. Dans la suite on verra que la géométrie pertinente est la géométrie symplectique.
Théorème de Liouville
Le théorème de Liouville affirme que lorsqu'un système mécanique évolue, le volume de toute partie de l'espace des phases est préservé. Voici comment on définit le volume d'une partie de l'espace des phases qui est de dimension 2n. Si la partie est définie par les conditions :
alors le volume est
Dans le cas où n = 1 on retrouve la définition de l'aire d'un rectangle. Si la partie dont on veut calculer le volume est plus compliquée, on la découpe en un très grand nombre de parties telles que plus haut et on fait la somme des volumes. Lorsque le nombre de rectangle tend vers l'infini et que leur réunion tend vers la partie initiale on trouve le volume.
Ainsi dans le cas du pendule simple, on a conservation de l'aire de toute partie de l'espace des phases que l'on suit lors de l'évolution du système.
Le théorème de Liouville affirme que l'évolution d'un système mécanique préserve le volume dans l'espace des phases.
On peut donc penser que la structure géométrique de l'espace des phases est celle du volume des objets mais on va voir dans le paragraphe suivante qu'il existe une géométrie plus subtile.
Théorème de Poincaré
Le théorème de Poincaré est un raffinement du théorème de Liouville. Pour l'énoncer il faut introduire quelques notations. Pour tout i compris entre 1 et n, on note πi la projection de l'espace des phases sur le plan des (qi,pi). C'est donc la fonction qui à
associe (qi,pi).Le théorème de Poincaré affirme que pour toute surface S dans l'espace des phases, la somme des aires des projections pii(S) est conservée par l'évolution du système. %Todo dessin de la projection d'une surface
Une structure symplectique sur un ensemble est un mécanisme d'attribution d'un nombre à toute surface dans l'ensemble et qui vérifie certaines conditions sur lesquelles on reviendra plus loin. Le fait d'associer à chaque surface S de l'espace des phases la somme des aires de ses projections πi(S) est un exemple de telle structure qu'on appelle structure symplectique canonique de l'espace des phases.
Le théorème de Poincaré affirme donc que l'évolution d'un système mécanique préserve la structure symplectique canonique de l'espace des phases.
On peut montrer que le théorème de Poincaré implique celui de Liouville.
Théorème de non-tassement de Gromov
Pendant très longtemps, personne n'a su si le théorème de Poincaré permettait d'avoir vraiment plus d'information sur l'évolution des formes dans l'espace des phases que le théorème de Liouville. Enfin, en 1985, Mikhaïl Gromov a démontré le théorème suivant : pour tout système mécanique à n degrés de liberté, la boule
ne peut jamais évoluer en un ensemble dont tous les points vérifient
 pour un r strictement plus petit que 1.
pour un r strictement plus petit que 1.
Or une telle évolution serait possible si seul le théorème de Liouville était vrai et pas le théorème de Poincaré. Ce théorème de Gromov est un théorème difficile et qui a de nombreuses conséquences, il a révolutionné le domaine de la géométrie symplectique.
Symétries en mécanique
Le deuxième argument confortant l'idée que la géométrie symplectique est la géométrie naturelle des espaces de phases est la facilité avec laquelle elle permet d'intégrer les questions de symétrie et leurs conséquences dans la théorie.
Théorème de Noether
La présence de symétries dans un système mécanique a toujours pour conséquence la conservation de certaines quantités calculées à partir des positions et vitesses des objets étudiés. Ainsi lorsqu'un système est invariant par translation dans une direction, la quantité de mouvement dans cette direction est conservée. Lorsque le système est invariant par rotation autour d'un axe, le moment cinétique par rapport à cet axe est conservé.
Dans la formulation Newtonnienne de la mécanique classique, il semble impossible d'énoncer un théorème général qui engloberait les exemples cités ainsi que des situations possédant des symétries plus compliquées.
Le théorème de Noether affirme que dès que l'on a un groupe à un paramètre de transformations qui préserve un système mécanique il existe une quantité conservée lors de l'évolution de ce système. En fait l'énoncé complet donne une formule pour cette quantité en fonction des transformations et du système considérés.
Dans la formulation lagrangienne de la mécanique on peut démontrer ce théorème en un dizaine de lignes. Dans la formulation hamiltonienne en termes de géométrie symplectique la démonstration ne fait qu'une ligne et l'énoncé se généralise au cas de groupe de transformations à un nombre quelconque de paramètres qui ne commutent pas nécessairement entre elles. Le nombre de quantités conservées est alors égal au nombre de paramètres du groupe de transformations.
Systèmes hamiltoniens intégrables
Une des conséquences de l'existence de quantités conservées est qu'elle contraint le système mécanique étudié à rester dans certaines régions de l'espace des phases définies par les conditions initiales.
Lorsqu'on a autant de quantités conservées que de degrés de liberté on dit que le système mécanique est intégrable et la situation devient très simple, c'est ce qu'affirme le théorème d'Arnold-Liouville : pour presque toute énergie de départ il existe des coordonnées
 et des nombres
et des nombres  tels que
tels que
Systèmes presque intégrables
Bien sûr la plupart des systèmes mécaniques ne sont pas intégrables mais certains sont proches d'être intégrable, on peut alors essayer de comprendre dans quelle mesure leur comportement s'éloigne de celui d'un système intégrable, c'est l'objet de la théorie des perturbations qui fait elle aussi un grand usage de la structure symplectique des espaces de phases.
Des connaissances élémentaires en géométrie différentielle sont nécessaires pour aborder les aspects techniques de la géométrie symplectique. L'introduction ici présentée donne un entr'aperçu des résultats fondamentaux qui se veut abordable.
La géométrie symplectique partage de nombreux points communs avec la géométrie de Riemann, qui étudie les variétés différentielles dotées de tenseurs bilinéaires non dégénérés symétriques. Par contre, les variétés symplectiques n'ont pas d'invariants locaux telle que la courbure. C'est une conséquence du théorème de Darboux qui établit que deux variétés symplectiques sont localement isomorphes. La question de savoir quelles variétés admettent des structures symplectiques n'est pas encore complètement résolue.
Chaque variété de Kähler est également une variété symplectique. Au cours des années 1970, les experts du domaine étaient incertains quant à la question de savoir si des variétés symplectiques compactes autres que celles de Kähler existaient, mais depuis plusieurs exemples ont peu être construits (le premier est dû à William Thurston).
La plupart des variétés symplectiques ne sont pas de Kähler et n'ont donc pas de structure complexe intégrable compatible avec la forme symplectique. Mikhaïl Gromov a remarqué cependant que les variétés symplectiques possèdent de nombreuses structures quasi-complexes qui vérifient tous les axiomes d'une variété complexe à l'exception du fait que les fonctions de transition n'y sont pas holomorphes.
Gromov développa le fait qu'il existe de telles structures pour fonder une théorie des courbes pseudoholomorphes, qui permit de grandes avancées dans la recherche géométrique symplectique, et notamment la découverte d'une classe d'invariants connus sous le nom d'invariants de Gromov-Witten, en coopération avec Edward Witten, qui jouent un rôle clé dans la théorie des cordes.
Présentation générale
Géométrie symplectique linéaire
La géométrie euclidienne concerne les espaces affines euclidiens E : à ces derniers sont associées une distance naturelle, appelée distance euclidienne, unique invariant pour l'action diagonale du groupe des isométries affines de E sur E2, et une notion d'angle. Les distances et angles définis par un ensemble de points de E sont préservés sous l'action d'une isométrie.
En oubliant la notion de distance, il est loisible de s'intéresser uniquement au volume euclidien. Il est bien connu qu'un isomorphisme linéaire affine préservant le volume est de déterminant +1 ou -1. Malheureusment, en dimension n, on perd ainsi toute information sur les configurations d'au plus n-1 points.
La géométrie symplectique linéaire apparaît comme une géométrie intermédiaire, dans laquelle on perd la notion de distance, tout en conservant une notion d'aire orientée, et donc un invariant associé à 3 points. À trois points A, B et C d'un espace vectoriel réel E doit être associée une aire a(ABC). Pour des raisons d'additivité et de monotonicité des aires, cette quantité doit s'écrire :
- a(ABC) = ω(AB,AC),
où
 est une forme bilinéaire. Comme une transposition sur les points A, B, C change l'orientation du triangle ABC, la forme ω doit être antisymétrique au sens où, pour tous vecteurs u et v :
est une forme bilinéaire. Comme une transposition sur les points A, B, C change l'orientation du triangle ABC, la forme ω doit être antisymétrique au sens où, pour tous vecteurs u et v :- ω(u,v) = − ω(v,u).
Cette forme est dite non-dégénérée lorsque, pour tout vecteur u, il existe un vecteur v vérifiant :
 . Par définition, une forme symplectique sur E désigne une forme bilinéaire antisymétrique non dégénérée. Une telle forme est unique à isomorphisme linéaire près ; et son existence implique que la dimension de E soit paire, disons 2n. Le modèle standard est l'espace Cn regardé comme espace vectoriel réel, avec comme forme symplectique la partie imaginaire de la métrique hermitienne standard.
. Par définition, une forme symplectique sur E désigne une forme bilinéaire antisymétrique non dégénérée. Une telle forme est unique à isomorphisme linéaire près ; et son existence implique que la dimension de E soit paire, disons 2n. Le modèle standard est l'espace Cn regardé comme espace vectoriel réel, avec comme forme symplectique la partie imaginaire de la métrique hermitienne standard.Un isomorphisme linéaire ou affine de E est dit symplectique lorsqu'il préserve la forme symplectique ω. L'ensemble des isomorphismes linéaires symplectiques de Cn forme un groupe, appelé le groupe symplectique, noté Sp(n) ou Sp(2n) suivant les auteurs. C'est un groupe de Lie classique connexe non compact de dimension n(n-1)/2. Il contient le groupe unitaire U(n) comme rétracte par déformation forte : ces deux groupes ont donc le même type d'homotopie.
La classification des ellipsoïdes dans un espace euclidien de dimension 2n modulo les isométries est donnée par 2n invariants, qui sont leurs diamètres respectifs. Par opposition, comme observé par Hofer et Zehnder[2], la classification des ellipsoïdes d'un espace symplectique modulo les applications affines symplectiques est donné par n invariants.
Géométrie symplectique
Les variétés différentielles s'obtiennent par des recollements d'ouverts d'espaces vectoriels réels de dimension finie suivant des difféomorphismes. Un intérêt porté sur des structures particulières peut conduire à imposer des restrictions sur la nature de ces recollements.
L'objet d'étude de la géométrie symplectique est les 2-formes différentielles fermées non dégénérées. Une telle forme différentielle est appelée forme symplectique. Sur une variété différentielle M, on se donne une forme antilinéaire non dégénérée ωx, et on demande à ce que la collection
 ait une certaine régularité en x. L'application
ait une certaine régularité en x. L'application  est un exemple de 2-forme différentielle, qu'on exige fermée : tous champs de vecteurs X, Y, et Z vérifient :
est un exemple de 2-forme différentielle, qu'on exige fermée : tous champs de vecteurs X, Y, et Z vérifient :![X\cdot\omega(Y,Z)+Y\cdot \omega(Z,X)+Z\cdot \omega(X,Y)=\omega([X,Y],Z)+\omega([Y,Z],X)+\omega([Z,X],Y)](/pictures/frwiki/99/cafb42aa9353df8939a401fa92557f92.png) .
.
 Darboux
DarbouxUne variété munie d'une forme symplectique est appelée variété symplectique. Une fois les objets d'étude définis, on a coutume de s'intéresser aux relations qu'ils peuvent entretenir entre eux. Un difféomorphisme
 s'appelle difféomorphisme symplectique lorsque f préserve les formes symplectiques ω. De manière plus explicite, la différentielle
s'appelle difféomorphisme symplectique lorsque f préserve les formes symplectiques ω. De manière plus explicite, la différentielle  est un isomorphisme linéaire symplectique. L'internaute mal à l'aise avec la géométrie différentielle comprendra les choses ainsi : au premier ordre, f est un isomorphisme symplectique linéaire.
est un isomorphisme linéaire symplectique. L'internaute mal à l'aise avec la géométrie différentielle comprendra les choses ainsi : au premier ordre, f est un isomorphisme symplectique linéaire.L'ensemble des difféomorphismes symplectiques de (M,ω) forment un groupe, appelé groupe des difféomorphismes symplectiques, et noté Symp(M,ω). Son étude a un intérêt de premier plan.
L'un des principaux résultats élémentaires de la géométrie symplectique est le théorème de Darboux : localement, deux variétés symplectiques de même dimension sont isomorphes. Dit autrement, aucun invariant local n'existe. Sur ce point, et pas le moindre, la géométrie symplectique s'oppose complètement à la géométrie riemannienne :
- En géométrie riemannienne, l'existence d'invariants de classe C2 se traduit par un groupe d'isométries de dimension finie et une quantité infinie de classes d'équivalence de métriques riemanniennes.
- En géométrie symplectique, l'inexistence d'invariants locaux au contraire donne un groupe de dimension infinie de difféomorphismes symplectiques et un ensemble "discret" de classes d'équivalence de formes symplectiques.
Cette dichotomie résume bien l'opposition entre la souplesse de la géométrie riemannienne contre la rigidité de la géométrie symplectique. Cette rigidité se retrouve à bien d'autres niveaux (rigidité des symplectomorphismes, théorème de rigidité de Gromov, ...).
Variétés symplectiques
Les espaces de phases étudiés jusqu'à maintenant étaient assez simples car nous étions partis d'espaces de configurations assez simples. Cependant, dans l'exemple du pendule simple, il eut été plus logique de considérer que la variable q1 vivait dans une cercle et pas dans une droite. Plus généralement, on peut imaginer des espaces de configuration arbitrairement compliqués, par exemple si un point est astreint à se déplacer sur une surface ayant une forme sophistiquée.
Quelle que soit la complexité de l'espace de configuration on peut toujours lui associer un espace des phases appelé fibré cotangent de l'espace de configuration et qui est toujours muni d'une structure symplectique canonique. Les théorèmes de Liouville, Poincaré, Noether et Liouville-Arnold restent vrais et on peut donner des analogues du théorème de Gromov dans ce cadre plus général.
Définition et théorème de Darboux
On peut vouloir aller plus loin dans la généralisation et étudier tous les espaces munis d'une structure symplectique. Pour cela il faut revenir un peu plus en détail sur la définition d'une structure symplectique. À partir de maintenant on considère un variété M de dimension 2n, c'est-à-dire un ensemble qui peut localement être paramétré par 2n nombres. Comme expliqué plus haut, une structure symplectique sur M est une application qui, à toute surface dans M, associe un nombre et qui vérifie en plus deux propriétés. La première est que cette structure doit permettre d'associer un volume à toute partie de dimension 2n de M en procédant comme expliqué dans le paragraphe sur le théorème de Poincaré. La deuxième condition est que le nombre associé à toute surface sans bord est nul.
Le passage des espaces de phases aux variétés symplectiques générales est une grande généralisation mais on peut montrer qu'une variété symplectique ressemble toujours localement à un espace de phases. C'est le théorème de Darboux : au voisinage de n'importe quel point, toute variété symplectique peut être paramétré par un espace de phase de sorte que toute surface assez petite se voit attribuer le même nombre par la structure symplectique donnée et par la structure symplectique de l'espace des phases.
Existence et classification
La question de savoir quels ensembles admettent au moins une structure symplectique est difficile. On connaît de nombreux exemples, des conditions nécessaires, d'autres qui sont suffisantes mais aucune caractérisation complète.
De même, une fois l'existence acquise on ne sait que très rarement combien de structures symplectiques réellement différentes cohabitent sur un même ensemble.
Symplectomorphismes
L'étude de la géométrie symplectique est née du constat que l'évolution d'un système mécanique préserve la structure symplectique canonique de l'espace des phases. Plus généralement on peut chercher à comprendre l'ensemble des transformations qui préservent une structure symplectique donnée. De telles transformations sont appelées symplectomorphismes et sont toujours très nombreuses, elles forment un ensemble de dimension infinie appelé groupe des symplectomorphismes. Pour comprendre la forme de cet ensemble, on cherche à le comparer à des ensembles plus petits que l'on comprend mieux. Les premiers résultats significatifs dans ce domaine sont dus à Gromov dans la foulée de son théorème de non-tassement.
Interactions
- Géométrie complexe : De nombreux exemples de structures symplectiques et de nombreuses questions viennent de la géométrie complexe. Ainsi pour (presque) toute équation polynomiale en plusieurs variables complexes, l'ensemble des solutions est muni d'une structure symplectique. L'étude de ces équations et des structures symplectiques s'éclairent l'une l'autre et c'est en transposant au cas symplectique général des idées nées dans le contexte de la géométrie complexe que Gromov a obtenu son théorème de non-tassement et de nombreux autres résultats révolutionnaires.
- Géométrie de contact : La géométrie de contact est une autre branche de recherche en géométrie qui entretient des liens tellement étroits que certains auteurs présentent la géométrie de contact comme un analogue en dimension impaire de la géométrie symplectique. Sous des circonstances favorables, le bord éventuel d'une variété symplectique hérite d'une structure de contact (la variété symplectique est alors appelée remplissage de la variété de contact) ; de nombreux problèmes se posent, comme l'existence d'un tel remplissage ou l'existence de caractéristiques fermées (lire à ce sujet Conjecture de Weinstein).
- Systèmes dynamiques (différentiables) : Les développements en géométrie symplectique ont été motivées par les conjectures d'Arnold concernant l'estimation du nombre de points fixes minimal d'un symplectomorphisme sur une variété symplectique compacte (voir Histoire). En retour, l'intégration de champs de vecteurs spécifiques dépendant du temps sur des variétés symplectiques donnent lieu à une classe particulière de symplectomorphismes, appelés difféomorphismes hamiltoniens. Les termes dynamique hamiltonienne ou système hamiltonien sont d'usage courant.
- Ergodicité : La n-ième puissance d'une forme symplectique sur une variété de dimension 2n est une forme volume, préservée par les symplectomorphismes. Des travaux de Polterovich portent sur les propriétés ergodiques de ces difféomorphismes, et en particulier donnent des estimations de leurs entropies métriques.
- Géométrie riemannienne : Une famille importante de variétés symplectiques est donnée par les variétés cotangentes.
- Géométrie algébrique : Suite aux travaux de Gromov, un certain nombre de concepts de géométrie complexe s'adaptent en géométrie symplectique : courbes holomorphes, invariants de Gromov-Witten, ...
Histoire
La géométrie symplectique est née de la formalisation hamiltonienne des lois de la mécanique classique. Cette formulation est née par la somme successive des travaux de Newton, de Lagrange, et de Hamilton, du XVIIe au XIXe. Mais ce n'est que dans les années 1960 que les outils de la géométrie symplectique ont pu être formalisés, sous l'impulsion de Vladimir Arnold, et avec la participation active de Mikhaïl Gromov et Jean-Marie Souriau.
Genèse de la géométrie symplectique
En 1666, Newton révolutionne simultanément la physique et les mathématiques en énonçant la loi d'attraction universelle. Cette loi permet de décrire le mouvement relatif d'une planète autour de son étoile. Encore aujourd'hui, malgré l'avènement de la relativité générale, cette loi est toujours utilisée aujourd'hui dans la détection des exoplanètes. Une planète, à l'instar de la Terre, subit la force attractive du Soleil, et son évolution est décrite par l'équation différentielle :
Le problème du mouvement relatif de deux corps en interaction mututelle est devenu un exercice classique incontournable du premier cycle universitaire. Newton lui-même en a donné une solution correcte dans les propositions 57 à 65 de ses Principia. La planète décrit par rapport à l'étoile un mouvement elliptique dont l'étoile est l'un des foyers. Six constantes sont nécessaires pour décrire ce mouvement :
- deux constantes t,u pour paramétrer le plan dans lequel le mouvement s'effectue ;
- deux constantes v,w pour décrire la position du second foyer dans ce plan ;
- une constante e, appelée l'excentricité, pour décrire l'ellipse ;
- et une constante θ pour décrire la position initiale de la planète.
Toutefois, cette description oublie la présence d'autres planètes. Le problème à
 corps est autrement plus ardu. Il résiste encore aujourd'hui à trois siècles d'histoire. Aucune solution analytique n'est connue, excepté pour le problème à trois corps, pour lequel on sait déterminer certaines solutions dites "homographiques".
corps est autrement plus ardu. Il résiste encore aujourd'hui à trois siècles d'histoire. Aucune solution analytique n'est connue, excepté pour le problème à trois corps, pour lequel on sait déterminer certaines solutions dites "homographiques".De 1808 à 1811, Joseph-Louis Lagrange, alors professeur de mathématiques à l' École polytechnique, s'intéresse au problème de la stabilité des planètes du système solaire. Compte-tenu du nombre de corps considérés, le problème est de taille ; il s'est depuis complexifié au fur et à mesure des avancées dans les observations astronomiques.
Grossièrement, la méthode de Lagrange consiste à effectuer des petites perturbations sur le mouvement d'une planète, autrement dit, sur les six constantes d'intégration. Cette perturbation varie dans le temps suivant une loi moyennant les forces subies :
Les calculs n'étaient pas justifiés. Poincaré montre la divergence des séries utilisées par les astronomes dans Méthodes nouvelles de la mécanique céleste. Il faudra attendre la seconde moitié du XXe siècle pour que les outils nécessaires soient introduits. La véritable révolution apportée par Lagrange est d'avoir introduit une fonctionnelle d'énergie, aujourd'hui notée L et appelée Lagrangien, dont les points critiques sont les trajectoires du mouvement.
Histoire de la géométrie symplectique
L'intérêt croissant vis-a-vis des structures symplectiques durant les dernières décennies s'explique par les besoins de la physique du XXe siècle. Le passage de la mécanique classique à la mécanique quantique est à ce jour encore mal compris. La question de fonder de sérieuses bases mathématiques est un défi qui a conduit les mathématiciens à s'interroger à nouveau sur la dynamique hamiltonienne (la mécanique classique, des systèmes dynamiques de points matériels à l'optique géométrique). Le regard porté à la lumière de la géométrie différentielle ne pouvait être que nouveau.
Dans la continuation des travaux de Lagrange et de Hamilton, pour établir l'existence d'orbites périodiques dans le problème des trois corps, Henri Poincaré se ramène à l'étude d'une application préservant l'aire sur un anneau
![S^1\times [-1,1]](/pictures/frwiki/49/10d35873f5d7303c9ab88ab2ac4cdcdb.png) . Cette application s'est avérée par la suite d'une grande utilité dans l'étude des flots de champs de vecteurs. Elle est aujourd'hui connue sous le nom d'application de retour de Poincaré.
. Cette application s'est avérée par la suite d'une grande utilité dans l'étude des flots de champs de vecteurs. Elle est aujourd'hui connue sous le nom d'application de retour de Poincaré.Les résultats furent démontrés dans les années 1920 par George David Birkhoff ; ils sont aujourd'hui considérés comme les premiers travaux sur la géométrie symplectique - s'ils peuvent être considérés comme tels. Le théorème de Birkhoff affirme l'existence de points fixes pour un difféomorphisme de l'anneau
, qui préserve la mesure de Lebesgue, et qui induit un difféomorphisme croissant sur  et un difféomorphisme décroissant sur
et un difféomorphisme décroissant sur  . En réalité, ils portaient davantage sur la préservation du volume. Mais en dimension 2, une mesure est essentiellement une forme d'aire, donc une forme symplectique. La dimension 2 reflète mal les particularités propres à la géométrie symplectique.
. En réalité, ils portaient davantage sur la préservation du volume. Mais en dimension 2, une mesure est essentiellement une forme d'aire, donc une forme symplectique. La dimension 2 reflète mal les particularités propres à la géométrie symplectique.Le théorème de Birkhoff préfigure la conjecture d'Arnold, énoncée au début des années 1960. Cette conjecture s'efforce de trouver un minorant du nombre d'orbites périodiques pour un difféomorphisme symplectique sur une variété symplectique compacte. En 1983 Conley et Zehnder démontrent la conjecture pour le tore par une étude variationnelle. Inspiré de ces travaux, Andreas Floer démontre en partie la conjecture pour une large classe de variétés symplectiques compactes, étendue par la suite par Weinstein. Les méthodes utilisées ont contribué à la mise en place de l'homologie de Floer. La formulation de cette homologie représente un des aspects les plus puissants mis en place ces dernières décennies.
Brièvement, et du moins sous certaines hypothèses, l'homologie de Floer consiste à compter des orbites périodiques d'une isotopie hamiltonienne et, modulo translation, des cylindres reliant ces orbites répondant à une EDP elliptique. L'ellipticité joue un rôle central.
Le théorème KAM figure parmi les résultats les plus cités en dynamique hamiltonienne. Il étudie la stabilité des systèmes mécaniques complètement intégrables. Le nom du théorème est l'abréviation des trois mathématiciens qui ont contribué à sa démonstration : Kolmogorov, Arnold et Moser. Il justifie dans le langage actuel des mathématiques les résultats de Lagrange.
Une autre investigation importante concerne l'introduction des capacités symplectiques. Ce sont des invariants symplectiques vérifiant de bonnes conditions de normalisation et d'homogénéité. Leur classification reste totalement incomprise à ce jour. Il existe un grand nombre de capacités introduites[3] : le rayon de Gromov, lié au théorème de non-plongement de Gromov ; les capacités d'Ekeland-Hofer et de Hofer-Zehnder, utilisant des études variationnelles sur la dynamique hamiltonienne ; ou encore un grand nombre de capacités dites spectrales dont l'introduction a été initiée par Claude Viterbo. L'utilisation de ces capacités a permis une preuve partielle de la conjecture de Weinstein (évoquée plus haut), et une preuve du théorème de rigidité de Gromov.
L'usage d'une généralisation des courbes holomorphes a porté de forts développements en géométrie symplectique.
La géométrie symplectique s'est constituée comme domaine d'étude à part entière dès la fin des années 1960. Ce nouveau souffle dans la recherche mathématique a introduit parallèlement d'autres disciplines, la quantification géométrique et la Théorie des champs symplectique.
Annexes
Bibliographie
- (en) McDuff et Salamon, Introduction to Symplectic Topology, Oxford University Press, 1998. ISBN 0-19-850451-9.
- (en) Fomenko, Symplectic Geometry (2nd édition) (1995) Gordon and Breach Publishers, ISBN 2-88124-901-9.
- Publications spécialisées
- (en) Alan D. Weinstein, Lectures on symplectic manifolds [détail des éditions]
- (en) Dusa McDuff et Dietmar Salamon, Introduction to symplectic topology [détail des éditions]
- (en) Helmut Hofer et Eduard J. Zehnder ; Symplectic Invariants and Hamiltonian Dynamics [détail des éditions]
- (en) Vladimir Igorevic Arnold, Mathematical methods of classical mechanics [détail des éditions]
Notes et références
- ↑ D. McDuff et D. Salamon, Introduction to symplectic topology, Second Edition, Oxford Mathematical Monographs, The Clarendon Press, Oxford University Press, New York, 1998.
- ↑ H. Hofer et E. Zehnder, Symplectic Invariants and Hamiltonian Dynamics, Birkhäuser, 1994.
- ↑ K. Cieliebak, H. Hofer, L. Latschev, F. Schlenk, Quantitative symplectic geometry, 9 juin 2005.
Voir aussi
Articles connexes
Liens externes
- Yasha Eliashberg, « Symplectic topology in the nineties », Differential Geometry and its Applications, Volume 9, Issues 1-2 , August 1998, Pages 59–88.
- Article listant les principaux papiers de géométrie symplectique publiés avant 1998.
- Patrick Iglesias, Les origines du calcul symplectique chez Lagrange
- Article sur la méthode des variations des constantes de Lagrange, amplement argumentés, abordable par le grand public.
- Patrick Iglesias-Zemmour, Aperçu des origines de la géométrie symplectique
- Article sur l'histoire de la géométrie symplectique avec la correction d'idées faussement communément admises.
- Michèle Audin et Patrick Iglesias, De la mécanique à la géométrie symplectique
- Exposé sur le mérite de Lagrange et rapide résumé de l'histoire des mathématiques qui a conduit à la formulation de la géométrie symplectique.
 Portail de la géométrie
Portail de la géométrie
Catégories : Géométrie symplectique | Topologie différentielle






Wikimedia Foundation. 2010.