- Mouvement de rotation
-
 Pour les articles homonymes, voir Rotation.
Pour les articles homonymes, voir Rotation. Sphère en rotation autour d'un de ses diamètres
Sphère en rotation autour d'un de ses diamètres
La rotation est l'un des deux mouvements simples fondamentaux des solides, avec la translation rectiligne. En génie mécanique, il correspond au mouvement d'une pièce en liaison pivot par rapport à une autre.
La notion de mouvement circulaire est une notion de cinématique du point : on décrit la position d'un point dans le plan. La rotation est une notion de cinématique du solide : on décrit l'orientation d'un solide dans l'espace.
L'étude du mouvement de rotation est la base de la méthode du centre instantané de rotation (CIR).
Sommaire
Définition
Un solide est en rotation si la trajectoire de tous ses points sont des cercles dont le centre est une même droite ; cette droite est appelée « axe de rotation », et habituellement notée Δ.
En cinématique dans le plan, les trajectoires des points sont des cercles concentriques, le centre commun de ces cercle est appelé « centre de rotation » et habituellement noté O.
Orientation, vitesse angulaire, accélération angulaire
Articles détaillés : vitesse angulaire et accélération angulaire.Cinématique plane
Définitions
 Définition de l'orientation et de la vitesse angulaire
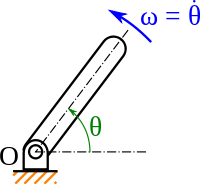
Définition de l'orientation et de la vitesse angulaireL'orientation du solide est repérée par un angle habituellement noté θ (voir Angles d'Euler). En cinématique plane, cet angle peut être défini comme l'angle entre
- une direction de référence passant par O, en général l'axe (Ox), et
- une droite passant par O et par un point A donné du solide distinct de O.
La vitesse de rotation ω est définie par
 .
.
l'accélération angulaire α est définie par
soit également
 .
.
À l'instar du mouvement de translation et du mouvement circulaire, on distingue le mouvement de rotation uniforme et le mouvement de rotation uniformément varié.
Mouvement de rotation uniforme
Dans le cas du mouvement de rotation uniforme, on a une accélération angulaire nulle
- α = 0
donc la vitesse de rotation est constante
- ω = ω0
et l'angle croît de manière linéaire
- θ = θ0 + ω0×t
où θ0 est l'orientation à l'instant initial. Ce mouvement idéal est en général utilisé pour décrire la partie centrale d'un mouvement (vitesse angulaire stable).
Mouvement de rotation uniformément varié
Dans le cas du mouvement de rotation uniformément varié, on a une accélération angulaire constante
- α = α0
donc la vitesse de rotation varie de manière uniforme
- ω = ω0 + α0×t
où ω0 est la vitesse à l'instant initial, et l'angle croît de manière quadratique
- θ = θ0 + ω0×t + 1/2×α0×t2
où θ0 est l'orientation à l'instant initial. Ce mouvement idéal est en général utilisé pour décrire le début et la fin d'un mouvement (mise en route ou arrêt).
Mouvement des points
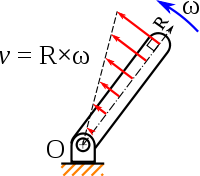 Triangle des vitesses dans le cas d'une barre en rotation
Triangle des vitesses dans le cas d'une barre en rotation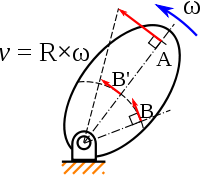 Triangle des vitesses dans le de points situés sur des axes différents
Triangle des vitesses dans le de points situés sur des axes différentsChaque point M de l'objet a une trajectoire circulaire, donc décrit un cercle de centre O et de rayon R = OM. Le vecteur vitesse instantané est tangent au cercle, donc perpendiculaire au rayon [OM]. Sa norme vaut
- v = ω×R.
Les équations horaires du point dans le cas des mouvements uniforme est décrit dans l'article Mouvement circulaire uniforme. Dans le cas général, elles sont décrites dans l'article Mouvement circulaire non uniforme.
Graphiquement, si l'on considère les vecteurs vitesse des points appartenant à une même droite passant par O, leurs extrémités sont sur une droite passant par O (en raison de la proportionnalité en R) ; la figure ainsi formée est appelée « triangle des vitesses ».
Cela permet une résolution graphique de problèmes cinématiques : si l'on connaît la vitesse d'un point du solide — par exemple point en contact avec un actionneur (extrémité de tige d'un vérin, dent d'engrenage), on peut déterminer le vecteur vitesse de tous les points du solide :
- leur direction est perpendiculaire au rayon en ce point ;
- la norme de la vitesse de tous les points situés sur un même cercle de centre O est identique ;
- si l'on « rabat » les points sur une même droite passant par O, les vecteurs forment le triangle des vitesse.
Par « rabattre le point B sur la droite », on entend trouver le point B' de la droite situé sur le même cercle de centre O.
Cinématique dans l'espace
 Position et vecteur vitesse de rotation
Position et vecteur vitesse de rotationDans le cas de la cinématique dans l'espace, on prend un axe de référence normal à l'axe de rotation et le coupant en O, et un point A du solide situé dans le plan normal à l'axe de rotation et passant par O.
Le vecteur vitesse de rotation
 est le vecteur
est le vecteur- ayant pour direction l'axe de rotation ;
- dont le sens est déterminé par la règle conventionnelle d'orientation : règle de la main droite, sens de vissage ;
- dont la norme est la dérivée de la position par rapport au temps.
Le vecteur accélération angulaire
 est la dérivée vectorielle de :
est la dérivée vectorielle de :Si O est un point de l'axe de rotation et A un point quelconque du solide, le vecteur vitesse
 en A est obtenu par
en A est obtenu par .
.
Le vecteur vitesse angulaire est la résultante
 du torseur cinématique. Le vecteur vitesse en A est le moment de ce torseur en ce point de réduction.
du torseur cinématique. Le vecteur vitesse en A est le moment de ce torseur en ce point de réduction.Dynamique et énergétique
On peut appliquer la dynamique du point à chaque élément de matière du solide. En intégrant sur la totalité du solide, on trouve les résultats suivants :
- l'inertie en rotation, ou inertie à la rotation, par rapport à l'axe Δ est exprimée par le moment d'inertie JΔ ;
- l'accélération angulaire est reliée aux couples extérieurs Cext et aux moments des forces extérieures par rapport à l'axe
 par le principe fondamental de la dynamique :
par le principe fondamental de la dynamique :
-
- ou, sous forme vectorielle
 .
.
Article détaillé : Dynamique de rotation.Par ailleurs, l'énergie cinétique en rotation Ec s'exprime par
et le théorème de l'énergie cinétique énonce que la variation de l'énergie cinétique est égale à la somme des travaux des couples et moments internes et externes. Le travail d'un couple C constant entre deux positions θ1 et θ2 s'écrit
- Wθ1→θ2(C) = C⋅(θ2 - θ1),
le paramètre (θ2 - θ1) étant l'amplitude du mouvement. Si le couple varie, on définit alors le travail élémentaire pour une petite rotation d'un angle dθ
- dWC = C⋅dθ
et
 .
.
La puissance P du couple se définit par
- PC = C⋅ω.
Sous forme vectorielle, la puissance devient
 .
.
Voir aussi








Wikimedia Foundation. 2010.