- Torseur cinematique
-
Torseur cinématique
Le torseur cinématique est, comme les torseurs statique, cinétique et dynamique, un outil mathématique utilisé couramment en mécanique classique.
Le torseur cinématique est utilisé pour décrire les comportements de translation et de rotation d'un solide indéformable, en général dans un repère orthonormé direct.
Sommaire
Définition
Le torseur cinématique d'un solide par rapport à un référentiel R quelconque est entièrement défini par deux vecteurs :
- le premier, caractéristique du champ des vitesses et indépendant du point d'expression du torseur, décrit le comportement rotatif du solide.

On doit lire Oméga de S (le solide étudié) par rapport à R.
- le second, exprimé en un point A du repère correspond à la vitesse du point A appartenant au solide par rapport à R.
On doit lire V en A (point appartenant au solide S dans R) de S par rapport à R.
Finalement l'ensemble s'écrit:

On doit lire torseur V en A de S par rapport à R est égal à Oméga de S par rapport à R et V en A de S par rapport à R.
Le champ des vitesses d'un solide indéformable est représentable par un torseur en raison du caractère équiprojectif de ce champ, caractère qui est intimement lié à l'indéformabilité du solide.
Le vecteur rotation
Le vecteur rotation
possède dans un repère tridimensionnel {R,x,y,z} trois composantes notées ωx , ωy, ωz.Le vecteur rotation s'écrit alors
 avec
avec  ,
, ,
, vecteurs formant le repère orthonormé R.
vecteurs formant le repère orthonormé R.Le vecteur rotation peut également être noté
Dans le cas où le vecteur rotation est nul le mouvement du solide est une translation simple. Tous les points du solide ont alors le même vecteur vitesse.
Le vecteur vitesse
Le vecteur vitesse
possède dans un repère tridimensionnel {R,x,y,z} trois composantes notées νx , νy, νz.Le vecteur vitesse s'écrit alors
 avec ,, vecteurs formant le repère orthonormé R.
avec ,, vecteurs formant le repère orthonormé R.Le vecteur vitesse peut également être noté
Lorsqu'un solide se déplace dans un plan, il est possible à chaque instant de définir un Centre instantané de rotation (CIR), qui est le point du solide de vitesse nulle dans ce plan.
Calcul du torseur en un autre point du solide
Connaissant le torseur cinématique complet en un point A du repère R et connaissant la distance entre le point A et un point B, on peut calculer le torseur complet au point B.
on note le torseur au point A
on note la distance entre BA
le vecteur rotation est identique en chaque point du repère, il reste simplement à calculer le vecteur translation.

Il est bien entendu que
 ,
,  et
et  appartiennent à S et sont tous repèrés comme
appartiennent à S et sont tous repèrés comme  dans R.
dans R.Finalement

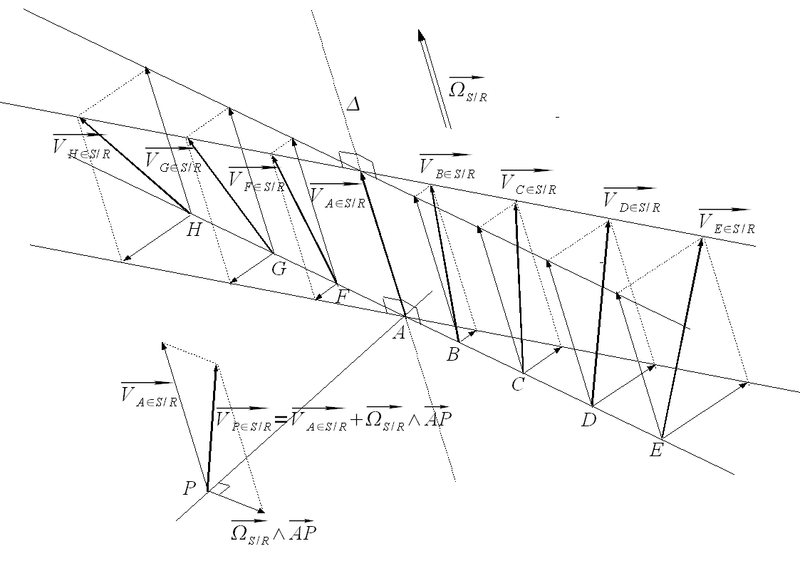
Représentation d'un torseur cinématique
Pour tous points P du solide en mouvement, le vecteur vitesse est une combinaison de
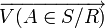 et du terme
et du terme  :
:
Informations diverses
Les vitesses de translations sont normalement exprimées en mètres par secondes (m/s). Les vitesses de rotations sont normalement exprimées en radians par secondes (rad/s).
 Portail de la physique
Portail de la physique
Catégorie : Torseur
Wikimedia Foundation. 2010.