- Transformation de möbius
-
Transformation de Möbius
- La transformation de Möbius ne doit pas être confondue avec la transformée de Möbius
Les transformations de Möbius sont de manière générale des automorphismes du compactifié d'Alexandrov de
 noté
noté  , définies comme la composée d'un nombre fini d'inversions par rapport à des plans ou des sphères.
, définies comme la composée d'un nombre fini d'inversions par rapport à des plans ou des sphères.En particulier, si on identifie
 à
à  , alors on peut prouver que les transformations de Möbius conservant l'orientation sont de la forme:
, alors on peut prouver que les transformations de Möbius conservant l'orientation sont de la forme:-
 avec a, b, c et d quatre complexes tels que
avec a, b, c et d quatre complexes tels que 
On étend alors cette fonction à
en posant :-
 et
et  .
.
Sommaire
Définition générale
Soit
 , on se place dans
, on se place dans  , et on définit alors les inversions de par rapport à un plan ou à une sphère:
, et on définit alors les inversions de par rapport à un plan ou à une sphère:- pour un hyperplan
 (
( ), l'inversion par rapport à P(a,t) notée σP(a,t) est la réflexion par rapport à l'hyperplan P(a,t) et a pour expression:
), l'inversion par rapport à P(a,t) notée σP(a,t) est la réflexion par rapport à l'hyperplan P(a,t) et a pour expression:
 si
si 

- pour une sphère
 (
( ) (, l'inversion par rapport à S(a,r) notée σS(a,r) s'exprime:
) (, l'inversion par rapport à S(a,r) notée σS(a,r) s'exprime:
 si
si  et
et 
On remarque que les inversions sont involutives: si σ est une inversion, σ2 = Id
De plus, ces inversions sont des homéomorphismes.
- Définition: L'ensemble des transformations de Möbius, est le sous-groupe des homéorphismes de généré par les inversions, c'est-à-dire l'ensemble des composées d'un nombre fini d'inversions. On le note souvent
 .
. - Définition: Le groupe de Möbius
 est l'ensemble des transformations de Möbius qui préservent l'orientation. C'est un sous-groupe de .
est l'ensemble des transformations de Möbius qui préservent l'orientation. C'est un sous-groupe de .
Exemples de transformations de Möbius
Les principaux exemples de transformations de Möbius sont:
- Les translations (par composition de deux réflexions)
- Les isométries de
 (par composition de n réflexions au plus)
(par composition de n réflexions au plus) - Les homothéties 'par composition de deux inversions par rapport à des sphères puis d'une isométrie)
Une transformation de Möbius particulière est très utile en géométrie hyperbolique: l'inversion dans
 par rapport à la sphère
par rapport à la sphère  , qui restreinte à correspond à la projection stéréographique de sur Sn = S(0,1) dans . C'est en fait le difféomorphisme naturel entre
, qui restreinte à correspond à la projection stéréographique de sur Sn = S(0,1) dans . C'est en fait le difféomorphisme naturel entre  et Bn + 1 = {x, | x | < 1}: il fait le pont entre deux points de vue pour la géométrie hyperbolique.
et Bn + 1 = {x, | x | < 1}: il fait le pont entre deux points de vue pour la géométrie hyperbolique.Propriétés générales
Dorénavant, on appelle sphère soit une sphère soit un plan (Beardon, The Geometry Of Discrete Groups). En remarquant que les inversions transforment les sphères en sphères, on obtient:
- Propriété: Les transformations de Möbius transforment les sphères en sphères
ce qui constitue une de leurs caractéristiques fondamentales.
Le théorème suivant est tout aussi important:
- Théorème: Soit Σ une sphère et φ une transformation de Möbius qui fixe chaque point de Σ. Alors soit φ est l'identité, soit φ est l'inversion par rapport à Σ.
Il permet notamment de montrer l'unicité de l' extension de Poincaré d'une transformation
 : c'est l'unique élément
: c'est l'unique élément  qui conserve
qui conserve  tel que
tel que  si l'on considère comme un sous ensemble de dont la n+1 ième coordonnée est nulle. Pour démontrer l'existence d'une telle extension, il suffit de la définir pour les inversions, l'extension d'une composée d'inversions étant alors la composée des extensions de ces inversions. Si
si l'on considère comme un sous ensemble de dont la n+1 ième coordonnée est nulle. Pour démontrer l'existence d'une telle extension, il suffit de la définir pour les inversions, l'extension d'une composée d'inversions étant alors la composée des extensions de ces inversions. Si  , on note
, on note  l'élément de dont les n premières coordonnées sont celles de a, la n+1 ième étant nulle. L'inversion par rapport à P(a,t) sera alors naturellement étendue en l'inversion par rapport à
l'élément de dont les n premières coordonnées sont celles de a, la n+1 ième étant nulle. L'inversion par rapport à P(a,t) sera alors naturellement étendue en l'inversion par rapport à  , et de même
, et de même  . On a la propriété remarquable suivante:
. On a la propriété remarquable suivante:- Propriété: L'extension de Poincaré de est une isométrie de
 muni de la métrique hyperbolique
muni de la métrique hyperbolique  .
.
Les transformations de Möbius du plan complexe
Forme générale
Les transformations de Möbius conservant l'orientation sont de la forme
 avec
avec
Réciproquement une telle fonction est bien une transformation de Möbius par composition des fonctions suivantes (
 ):
): (translation)
(translation) (inversion par rapport à la sphère unité puis réflexion par rapport à la droite réelle)
(inversion par rapport à la sphère unité puis réflexion par rapport à la droite réelle) (homothétie)
(homothétie) (translation)
(translation)
Détermination d'une transformation de Möbius du plan
La résolution de g(z)=z montre qu'une transformation de Möbius est uniquement déterminée par l'image qu'elle donne de trois points distincts. Mieux, si z1,z2 et z3 sont des points tous distincts ainsi que w1,w2,w3, alors il existe une unique transformation de Möbius
 telle que g(z1) = w1, g(z2) = w2 et g(z3) = w3.
telle que g(z1) = w1, g(z2) = w2 et g(z3) = w3.Pour montrer l'existence de g, il suffit de "déplacer" les points en composant g avec d'autres transformations. La transformation de Möbius
 vérifie: A(z1) = 0, A(z2) = 1 et
vérifie: A(z1) = 0, A(z2) = 1 et  , et de même on peut construire B telle que B(w1) = 0, B(w2) = 1 et
, et de même on peut construire B telle que B(w1) = 0, B(w2) = 1 et  . Alors la transformation g = B − 1A répond à la question.
. Alors la transformation g = B − 1A répond à la question.Représentation par des matrices
On remarque que à la matrice
 () on peut faire correspondre la transformation de Möbius gA telle que
() on peut faire correspondre la transformation de Möbius gA telle que  . De plus un calcul algébrique trivial montre que:
. De plus un calcul algébrique trivial montre que:  : on a ainsi un morphisme de groupe
: on a ainsi un morphisme de groupe  entre
entre  et
et  .
.De plus, pour tout
 , gλA = gA, donc on en restreignant φ à
, gλA = gA, donc on en restreignant φ à  on a toujours une surjection dont le noyau est { − I2, + I2}. On a ainsi:
on a toujours une surjection dont le noyau est { − I2, + I2}. On a ainsi:Extension de Poincaré
Nous avons vu dans les propriétés générales que les transformations de Möbius admettent une extension de Poincaré. Nous allons l'expliciter dans le cas d'une transformation du plan complexe en considérant
 comme le
comme le  sous espace vectoriel du corps des quaternions de base (1,i,j). Si on a
sous espace vectoriel du corps des quaternions de base (1,i,j). Si on a  alors son extension de Poincaré a pour expression, pour tout
alors son extension de Poincaré a pour expression, pour tout  :
:Classification
En résolvant l'équation g(z) = z, on s'aperçoit qu'une transformation de Möbius du plan ne peut admettre que 1 ou 2 points fixes, ce qui pourrait être un critère de classification. Cependant, un critère plus précis est le nombre de points fixes de leur extension de Poincaré (1, 2 ou une infinité): si on définit les transformations normales mk,
 par
par si
si 

on s'aperçoit que chaque transformation de Möbius est conjuguée à une unique transformation normale mk, avec k = 1 ssi
 possède 1 point fixe,
possède 1 point fixe,  ssi a 2 point fixe, et
ssi a 2 point fixe, et  ssi a une infinité de points fixes. Enfin, la trace au carré d'un représentant
ssi a une infinité de points fixes. Enfin, la trace au carré d'un représentant  de g (qui est invariante par conjugaison et caractérise mk modulo les conjugaisons) permet elle aussi de caractériser le nombre de points fixes de . On définit alors les termes de transformation loxodromique, parabolique ou elliptique, ce qui est résumé dans le tableau suivant:
de g (qui est invariante par conjugaison et caractérise mk modulo les conjugaisons) permet elle aussi de caractériser le nombre de points fixes de . On définit alors les termes de transformation loxodromique, parabolique ou elliptique, ce qui est résumé dans le tableau suivant:Transformation Points fixes de Trace au carré σ Forme normale Représentant Parabolique 1 σ = 4 m1 

Loxodromique 2 ![\sigma\in\mathbb C, \sigma \not\in [0,4]](/pictures/frwiki/54/62b7bac029f220a0f97382254ded4939.png)

k = λ2,λ − 2

Elliptique 

mk, | k | = 1,

On peut encore affiner cette classification dans le cas loxodromique: g sera hyperbolique si sa trace au carré est réelle, strictement loxodromique dans le cas contraire.
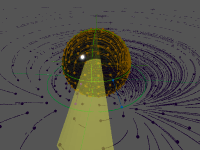
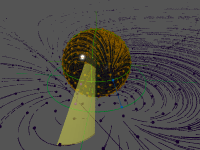
Projection stéréographique
La projection stéréographique envoie le plan complexe sur la sphère de Riemann, sur laquelle on aperçoit plus aisément l'action des transformations de Möbius, comme en témoignent les représentations suivantes.
Elliptique Hyperbolique Loxodromique Un point fixe à l'infini 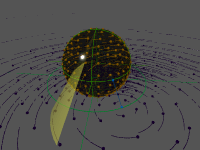
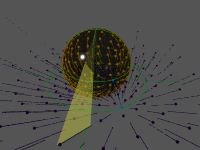
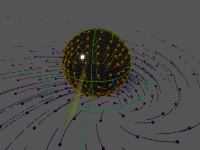
Points fixes diamétralement opposés 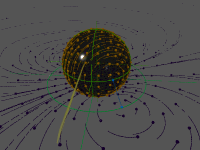
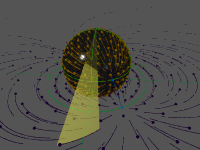
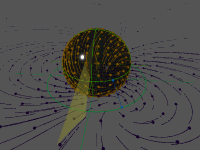
Points fixes arbitraires 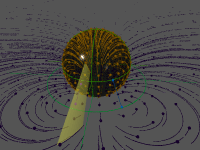
Références
- Alan F. Beardon, The Geometry of Discrete Groups, New York: Springer-Verlag, 1995 (ISBN 0-3879-0788-2)
Voir aussi
 Portail des mathématiques
Portail des mathématiques
Catégories : Transformation géométrique | Géométrie projective


Wikimedia Foundation. 2010.