- Principe de superposition
-
On dit qu'un système est linéaire ou relève du principe de superposition si à la somme de deux excitations correspond la somme des deux réponses correspondantes.
Plus précisément, si l'on note les excitations ƒ (par référence aux forces de la mécanique) et les réponses x (par référence aux mouvements) :
- lorsque l'on sollicite le système par une excitation ƒ1(t), la réponse est x1(t) ;
- lorsque l'on sollicite le système par une excitation ƒ2(t), la réponse est x2(t) ;
alors le système est dit linéaire si
- pour λ1 et λ2 deux nombres quelconques, la réponse à l'excitation λ1ƒ1 + λ2ƒ2 est λ1x1 + λ2x2.
Ce résultat se généralise alors à un nombre quelconque d'excitations. En d'autres termes, si on sait décomposer une excitation en une somme de fonctions simples, il sera éventuellement possible de calculer la réponse correspondante en additionnant des réponses individuelles calculables explicitement.
D'un point de vue épistémologique, il s'agit d'une démarche de type analyse et synthèse :
- analyse : on découpe un problème en sous-problèmes : principe de la « fracture » (al-jabr d'Al-Khawarizmi, 833), ou encore « diviser chacune des difficultés que j'examinerais, en autant de parcelles qu'il se pourrait, et qu'il serait requis pour les mieux résoudre » (René Descartes), Discours de la méthode, 1637) ;
- on étudie chaque sous problème (sollicitations simples ƒ1, ƒ2, …) ;
- synthèse : le problème complexe est la somme des sous-problèmes.
En fait, les systèmes concrets possédant cette propriété sont rarissimes, pour ne pas dire inexistants. Fort heureusement, bon nombre de systèmes peuvent être raisonnablement linéarisés,
- soit en ignorant les petites non-linéarités dans l'hypothèse des petites variations, voir Systèmes oscillants à un degré de liberté et de manière générale la notion mathématique d'approximation linéaire,
- soit en procédant à une linéarisation optimisée dans le cas contraire.
En mécanique quantique, les particules atomiques peuvent exister dans plusieurs états superposés et simultanés, par exemple un électron qui peut se trouver en deux endroits à la fois, ou un photon qui passe par les deux fentes de Young en même temps.
Sommaire
Application aux circuits électriques
Dans le cas des circuits électriques composés exclusivement d'éléments linéaires (résistances, capacités, inductances, générateurs de tension ou de courant indépendants ou dépendants linéairement d'un courant, d'une tension, etc.), la réponse dans une branche est égale à la somme des réponses pour chaque générateur indépendant pris isolément, en désactivant tous les autres générateurs indépendants (générateurs de tension remplacés par des court-circuits et générateurs de courant par des circuits ouverts).
- Exemple
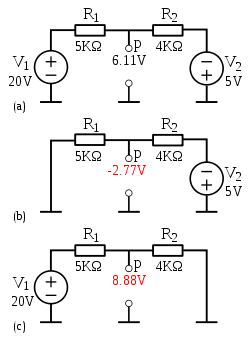 Illustration du principe de superposition.
Illustration du principe de superposition.
- En (a): La tension en P par rapport à la masse commune est de 6,11 volts. Cette valeur a été calculée en appliquant le principe de la superposition. Les étapes suivantes en font la démonstration.
- En (b): Court-circuit de V1 pour trouver l'influence de V2. La tension entre P et la masse devient égale à la tension aux bornes de R1. On calcule cette tension avec la formule du diviseur de tension;
- En (c): Court-circuit de V2 pour trouver l'influence de V1. La formule du diviseur de tension est de nouveau employée;
L'addition (superposition) des valeurs obtenues, nous donne bien la tension au point P de notre circuit;
On peut appliquer le même principe à des circuits utilisant plus de deux sources. Aussi, chaque diviseur de tension peut comprendre un nombre quelconque de résistances en série.
Géologie
En géologie, le principe de superposition fait partie des méthodes de datation relative.
Résistance des matériaux et mécanique des milieux continus
En résistance des matériaux, on étudie des sollicitations élémentaires : traction et compression, cisaillement, torsion, flexion. Les matériaux sont d'ailleurs caractérisés par des essais mécaniques reproduisant ces sollicitations simples : essai de traction, essai de torsion, essai de flexion. À partir des charges auxquelles est soumise la pièce, on détermine les contraintes en chaque point de la pièce. Ces contraintes sont de deux types : contrainte normale, notée σ, et contrainte de cisaillement, notée τ :
- σ : traction, compression, flexion ;
- τ : cisaillement, torsion ;
la contrainte de cisaillement en flexion est en général ignorée.
Un pièce réelle est en général soumise à plusieurs sollicitations. En résistance des matériaux, on cherche à rester dans le domaine élastique, donc en petites déformations. De ce fait, on peut considérer que le système est linéaire et appliquer le principe de superposition :
- les contraintes normales s'ajoutent entre elles ;
- les contrainte de cisaillement s'ajoutent entre elles.
En particulier,
- en flexion, on établit des formulaires pour les cas simples ; pour un problème complexe, on ajoute simplement les diagrammes des efforts tranchants entre eux, les diagrammes des moments fléchissants entre eux, et les déformées entre elles ; cela revient à ajouter les contraintes ;
- dans le cas de la flexion déviée et de la flexion + traction ou compression, on ajoute les contraintes normales.
La coexistence de contraintes normale et de cisaillement (par exemple flexion + torsion) nécessite de recourir à d'autre méthodes telles que le cercle de Mohr ou la notion de contrainte équivalente.
Voir aussi
 Portail de la physique
Portail de la physique Portail de l’électricité et de l’électronique
Portail de l’électricité et de l’électronique
Catégorie :- Théorie électrique




Wikimedia Foundation. 2010.