- Hayabusa MUSES-C
-
Hayabusa (sonde spatiale)
 Pour les articles homonymes, voir Hayabusa.
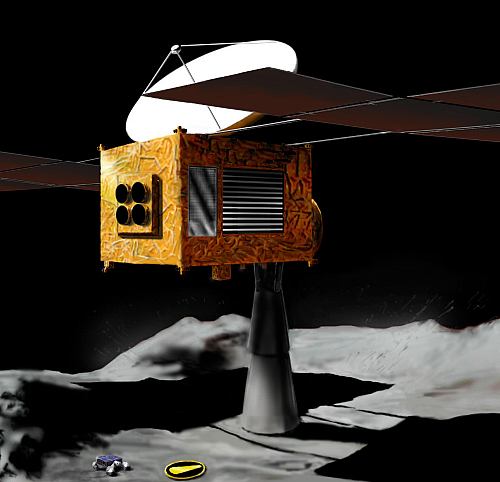
Pour les articles homonymes, voir Hayabusa.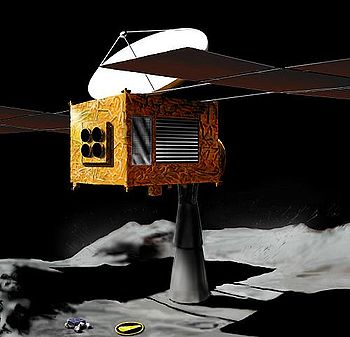 Vue d'artiste de la sonde Hayabusa, avec en bas le marqueur permettant à la sonde déterminer son altitude et un peu plus à gauche, le mini-robot Minerva
Vue d'artiste de la sonde Hayabusa, avec en bas le marqueur permettant à la sonde déterminer son altitude et un peu plus à gauche, le mini-robot Minerva
Hayabusa (du japonais 隼, « faucon pélerin ») (ou MUSES-C) est le nom d'une sonde spatiale japonaise de l'Agence d'exploration aérospatiale japonaise (JAXA), ayant pour objectif l'étude de l'astéroïde Itokawa. Lancée en 2003, elle a atteint Itokawa en 2005, autour duquel elle évolue.
La particularité de cette mission est que son programme prévoyait que la sonde prélève quelques grammes d'échantillons de l'astéroïde au cours d'atterrissages successifs et revienne sur Terre en 2007. Malgré plusieurs incidents ayant émaillé les tentatives d'atterrissage, les responsables de la mission espèrent que la sonde a pu recueillir au moins un peu de poussière de Itokawa. Par ailleurs, d'autres incidents ont eu pour conséquence que la sonde a manqué sa fenêtre de lancement et ne reviendra sur Terre qu'en 2010.
Sommaire
Objectifs
Dotée de deux moteurs ioniques, Hayabusa doit valider l'utilisation de ce moteur sur de longues distances. Ce type de moteur étant très efficace, il sera probablement utilisé pour les missions futures d'exploration de l'espace.
Hayabusa dispose également d'un système de navigation utilisant à la fois des mesures radio et optiques pour calculer sa trajectoire et d'approcher l'astéroïde, sans devoir être guidée par un être humain. L'utilisation de ce nouveau système est donc aussi testée par la sonde.
L'étude de l'astéroïde se fera à distance (à l'aide de nombreux appareils scientifiques embarqués), mais également à travers le prélèvement d'échantillons.
La sonde retournera vers la Terre à l'aide de son moteur ionique, où elle larguera dans l'atmosphère terrestre une capsule contenant des échantillons de la surface de l'astéroïde. Ceci constitue également une expérience importante pour l'ingénierie spatiale.
L'objectif technologique principal de cette mission est donc de tester les technologies de pointe requises pour le prélèvement et le retour sur Terre d'échantillons extraterrestres.
La sonde
La sonde Hayabusa a la forme d'une boîte de 1,5 mètre de largeur comme de longueur et de 1,05 mètre de haut.
Deux panneaux solaires en arséniure de gallium, d'une aire totale de 12 mètres carrés se déploient de chaque côté de la sonde. Une antenne parabolique de haut gain, de 1,5 mètre de diamètre, est fixée sur le dessus, assurant les communications avec la Terre, assisté de deux autre antennes de bas gain fixé sur un autre côté. Sur le côté opposé à celui où se trouve l'antenne à haut gain, un cornet de 40 centimètres de diamètre à son extrémité permettra de récupérer les échantillons de l'astéroïde.
Son poids lors du lancement était de 530 kg, dont 50 kg de carburant et 65 kg de gaz xénon pour le moteur ionique.
Propulsion
Hayabusa est propulsée pendant les phases de mouvements par deux moteurs ioniques. Ce type de moteur fonctionne schématiquement de la manière suivante : dans le moteur ionique, le xénon est ionisé par micro-ondes, puis les ions sont accélérés dans un champ électrique intense. Enfin, les ions sont accélérés puis éjectés fournissant une poussée maximale de 20 mN. Bien que la poussé soit faible, c'est le fait qu'elle puisse être maintenue dans la durée et ainsi permettre à la sonde d'atteindre des vitesses importantes qui rend ce type de propulsion intéressant pour les voyages spatiaux.
La sonde est dotée d'un autre système de propulsion, fonctionnant au tétroxyde d'azote/hydrazine, qui fournit la poussée supplémentaire de 22 N nécessaire pour les manœuvres.
Prélèvement d'échantillons
L'astéroïde Itokawa est si petit et sa gravité est si faible que la sonde ne va pas vraiment atterrir, elle va plutôt « accoster ».
Nous ne savons pas de quoi est constitué l'astéroïde et nous ignorons également si sa surface est faite de roche dure ou de sable fin. Toute pression ou force qu'on appliquerait à l'astéroïde, afin d'en creuser la surface, propulserait la sonde dans l'espace. Une autre méthode a donc été développée afin d'en prélever des échantillons : détruire un bout de la surface à l'aide d'un petit projectile et en récolter les fragments.
La procédure est la suivante : une fois que la sonde sera suffisamment proche de la surface, elle arrêtera son moteur afin de ne pas la contaminer. Le reste de la descente se fera en « chute » libre (la gravité étant faible, de l'ordre de 1/100 000 de celle régnant sur Terre). Comme mentionné plus haut, la sonde est dotée d'un cornet de 40 centimètres de diamètre à son extrémité. Dès que ce cornet frôlera le sol, un projectile de quelques grammes sera tiré à une vitesse de 300 m/s. L'impact de ce projectile avec la surface provoquera l'émission de fragments et de poussières qui seront récupérés et transférés dans une capsule via le cornet. Les scientifiques espèrent récupérer approximativement 1 gramme de poussières, provenant de 3 endroits différents. Le temps de contact sur l'astéroïde est estimé à 1 seconde par prélèvement.
Cette méthode de prélèvement d'échantillons est à l'origine du surnom donné à la sonde. En effet, un faucon (Hayabusa) plonge sur sa proie, l'attrape dans ses serres et reprend son envol sans atterrir.
Instruments scientifiques
Plusieurs instruments scientifiques équipent la sonde, certains sont utilisés pour la navigation.
Équipement Description Optical Navigation Camera (ONC) et Light Detection And Ranging (LIDAR) Ce système est utilisé pour faire de l'imagerie, pour des mesures de polarimétrie et enfin, pour la navigation, lors du processus d'approche de l'astéroïde. Il permet, en effet, de calculer une position relative à un astéroïde (ou à un corps céleste en général) en utilisant la détection et la télémétrie par la lumière (avec LIDAR). X-Ray Fluorescence Spectrometer Ce spectromètre a été conçu pour étudier les rayons X émis par l'astéroïde. Il permettra d'en identifier les constituants chimiques principaux. Near-IR Spectrometer Cet appareil fonctionne dans le proche infrarouge (longueurs d'onde de 800 à 2 500 nm). Il peut détecter les différents matériaux qui composent la surface de l'astéroïde. Star Tracker (STT) Cet instrument permet de déterminer avec précision la position de la sonde dans l'espace, en observant et en identifiant la position des étoiles. Il est composé de deux parties : un appareil photo numérique et un ordinateur. Fan Beam Sensor (FBS) Ce capteur de faisceau électromagnétique sert à détecter d'éventuels obstacles sur le site d'atterrissage de la sonde. Laser Range Finder (LRF) Lorsque que le cornet de prélèvement touchera la surface de l'astéroïde, sa longueur en sera légèrement modifiée. Le capteur LRF détectera cette variation et déclenchera l'envoi du projectile à travers le cornet. Minerva
Un rover fourni par la NASA devait initialement être déposé sur l'astéroïde afin d'en étudier la surface. Ce projet a cependant été annulé suite à des restrictions budgétaires. Un autre micro-robot appelé Minerva (acronyme de MIcro/Nano Experimental Robot Vehicle for Asteroid) et développé par la JAXA, devait être lâché sur l'astéroïde afin d'en étudier la surface.
Il se présente sous la forme d'un hexadécagone (un polygone à 16 côtés) de 120 millimètres de diamètre pour 100 mm de haut et une masse de seulement 591 grammes. Son alimentation électrique est assurée par plusieurs petits panneaux solaires.
Toutes les opérations effectuées sur Itokawa doivent tenir compte de la gravité extrêmement faible régnant autour de celui-ci. Comme se mouvoir sur des roues, à la surface d'un corps, nécessite un minimum de gravité, un autre mode de déplacement a dû être développé. Le robot était conçu pour se déplacer en bondissant, avec une vitesse maximale de 9 cm/s. Minerva devait calculer chaque bond avec précision pour éviter, soit de "flotter" au dessus du sol d'Itokawa, soit de se mettre en orbite autour de celui-ci.
Minerva est équipé de 3 caméras CCD, dont deux sont utilisées ensemble pour générer une représentation en 3D de la surface d'Itokawa, elles sont capables de voir de 10 à 50 cm devant elles. La troisième caméra observe des régions plus éloignées.
En plus des images, des relevés de température devaient être effectués avec les six capteurs thermiques.
La sonde Hayabusa devait servir de relais pour la transmission des données vers la Terre.
Le largage de ce dernier en novembre 2005 a cependant échoué, celui ci n'ayant pu atteindre la surface de l'astéroïde.
Coût de la mission
Le coût de la sonde Hayabusa est d'approximativement 12 milliards de yens.
Déroulement de la mission
La sonde Hayabusa a été lancée le 9 mai 2003 par une fusée M-V à partir du Centre spatial Kagoshima près d'Uchinoura au Japon.
Le 19 mai 2004, la sonde est passée près de la Terre pour utiliser son assistance gravitationnelle et se placer sur une nouvelle orbite elliptique la menant vers Itokawa. Lors de son passage à proximité de notre planète, Hayabusa a testé son système de navigation optique (ONC et LIDAR) qui lui permet de calculer sa position relative par rapport à un corps céleste.
Le 31 juillet 2005, un de ses trois gyroscopes, tombe en panne, mais la mission continue sans problème, car la sonde peut fonctionner avec seulement deux gyroscopes.
L'approche et l'étude
La sonde a atteint son objectif le 12 septembre 2005. Une fois sur place, Hayabusa ne se mettra pas en orbite autour de l'astéroïde mais parcourra une orbite héliocentrique proche de celui-ci. Dans un premier temps, Hayabusa restera à plus de 10 kilomètres de l'astéroïde et effectuera de nombreuses observations scientifiques (dont des mesures du champ gravitationnel, de la topographie, etc.). Ces informations, intéressantes en elles-mêmes, vont également servir à repérer les sites adéquats pour le prélèvement d'échantillons.
Le 2 octobre, la sonde perd un deuxième volant d'inertie, l'obligeant à utiliser ses propulseurs chimiques pour stabiliser ses mouvement. Cette défaillance oblige à réduire le nombre de prélèvements de 3 à 2, par manque de carburants pour les propulseurs chimiques. Cependant, la phase de cartographie ne devrait pas être touchée par cette défaillance, vu qu'elle est presque terminée.
En raison de la distance, il est impossible pour les responsables sur Terre de piloter l'approche. Même si la station de contrôle sur Terre ne peut manœuvrer la sonde, elle peut lui ordonner de suspendre la descente en cas de danger. Et c'est ce qui s'est produit le 4 novembre, où la JAXA a annulée la manœuvre de descente, suite à la détection d'une erreur dans le système de navigation optique de la sonde alors qu'elle était à environ 1 kilomètre. L'agence japonaise a préférée annuler la descente et la reprendre plus tard, par mesure de sécurité et éviter de mettre en péril Hayabusa. L'équipe en charge d'Hayabusa a relativisé la gravité de la défaillance, qui pourrait se révéler minime et être dû à la complexité des formes sur le sol d'Itokawa.
Échec de l'envoi de Minerva
Le 12 novembre, Hayabusa recommence une répétition générale de sa descente. Cette fois-ci, tous les paramètres sont corrects et le largage du micro-robot Minerva a lieu. Malheureusement, ce dernier ne touchera jamais le sol de l'astéroïde, pour y effectuer ses bonds. Bien que les communications avec l'engin aient été établis, ce dernier a finalement dérivé, sans avoir pu effectuer de relevés. Les responsables de la sonde pensent que l'ordre de largage a été donné lorsque la sonde ne se dirigeait plus vers l'astéroïde. Bien que Minerva soit perdu, la répétition de la descente s'est déroulée correctement et les tentatives de prélèvement d'échantillons sont toujours prévus pour le 19 et 25 novembre.
Atterrissage non contrôlé d'Hayabusa
Le 19 novembre, la première tentative de prélèvement d'échantillons a lieu. A environ 40 mètres au dessus de l'astéroïde, un repère (Target Marker) de 10 cm est envoyé sur Itokawa. En réfléchissant un rayon lumineux envoyé par Hayabusa, le repère lui permet de calculer plus précisément la distance la séparant du « sol » et doit faciliter la procédure de prélèvement.
A environ 17 mètres d'altitude, le signal est interrompu car l'antenne à haut gain n'était plus alignée vers la Terre à cause d'un changement d'inclinaison d'Hayabusa, pour éviter un obstacle qu'un capteur aurait détecté. De plus, le basculement des stations Goldstone (en Californie) et Usuda (au Japon) du Deep Space Network de la NASA s'est produit au même moment, résultat, aucune donnée n'a pu être reçue. Cela n'a pas empêché la sonde de continuer à descendre lentement, pour finalement toucher Itokawa à 21h10 TU, rebondir très lentement deux fois et se stabiliser à 21h30 TU.
La sonde n'a pu effectuer son prélèvement, il semblerait qu'elle était posée de «guingois», sur la tranche des panneaux solaires. Après environ 30 minutes sur le sol d'Itokawa, Hayabusa reçoit un ordre d'interruption de la descente que le centre de contrôle de la JAXA avait envoyé lors de la perte de communication. La sonde redécolle alors, pour se placer à environ 100 kilomètres d'Itokawa.
Seconde tentative de prélèvement
Le repère étant en place, une nouvelle tentative de prélèvement est effectuée comme prévu le 25 novembre. A 20h10 TU, la sonde interrompt ses communications pour effectuer une modification de son orientation pour préparer son contact avec le sol. A 20h16 TU, la communication reprend et à 20h20 TU la sonde indique qu'elle est en train de remonter.
L'analyse de la télémétrie indique que la sonde a bien effectué un prélèvement et que deux impacteurs ont été tirés. La sonde a l'air en bon état, mis à part certains de ses propulseurs, qui ne semblent pas fonctionner correctement. L'équipe d'Hayabusa effectue des tests pour définir le véritable problème. Qui pourrait avoir pour origine un choc lors de l'atterrissage non contrôlé du 19 novembre, jour de la première tentative de prélèvement.
Début décembre, la Jaxa se rétracte : il semblerait finalement qu'aucun impacteur n'ait été tiré sur le sol de l'astéroïde. Par conséquent, il est probable que le cornet de prélèvement n'ait rien collecté.
Le retour sur Terre
Après avoir passé plusieurs mois à étudier Itokawa, la sonde devait redémarrer ses moteurs dans la première moitié du mois de décembre 2005, afin de revenir vers la Terre, qu'elle aurait ainsi atteint durant l'été 2007. Malheureusement, la fenêtre de départ a été manquée à cause de l'instabilité de la sonde due à une fuite de carburant survenue le 26 novembre [1] qui finit par entrainer la rupture des communications. La Jaxa réussit cependant à restaurer les communications et à stabiliser la sonde début 2006, et modifia le plan de mission pour un retour de Hayabusa sur Terre à l'été 2010 [2]. Selon ce nouveau plan de vol, la sonde a commencé son voyage de retour en avril 2007 [3]. La capsule contenant ou non des échantillons de la surface d'Itokawa se séparera de la sonde à une distance de plus de 200 000 kilomètres de la Terre et rentrera dans l'atmosphère terrestre, encaissant une chaleur extrême (3 000 °C) et des décélérations brutales. Un parachute freinera la chute de la capsule pour arriver en Australie.
Notes
- ↑ Site de Hayabusa
- ↑ Voir Site de Hayabusa
- ↑ Voir Site de Hayabusa
Liens externes
- (en) Site de Hayabusa sur le site de l'Agence d'exploration aérospatiale japonaise (JAXA)
- (fr) Hayabusa - Muses-C, de Catherine Ledent, sur le site Astrocosmos.net (D'importantes parties de l'article de Wikipédia se basent sur cet article)
- Animation montrant le mode de déplacement de Minerva, au format MPEG
- (en) Images de la Terre et de la Lune, prisent par Hayabusa, sur le site de la JAXA
- (en) Hayabusa (Muses-C), sur le site de la NASA
- (fr) La sonde spatiale japonaise Hayabusa voit sa cible: l'astéroïde Itokawa, sur le site Techno-Science.net
 Portail de l’astronautique
Portail de l’astronautique Portail de l’astronomie
Portail de l’astronomie
Catégories : Exploration des objets mineurs | Sonde spatiale | Programme spatial japonais
Wikimedia Foundation. 2010.