- Northern Light (sonde spatiale)
-
 Pour les articles homonymes, voir Northern Lights.
Pour les articles homonymes, voir Northern Lights.Northern Light
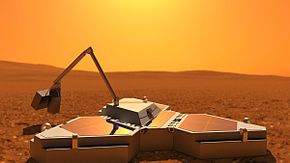

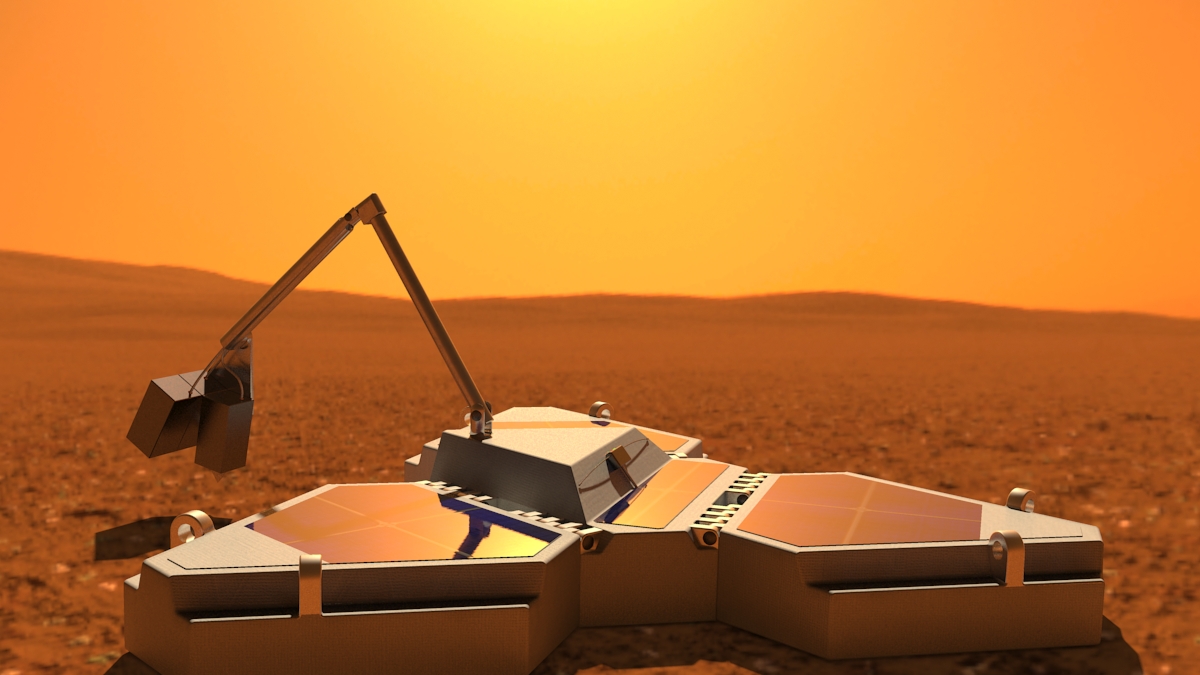
Lander Northern Light sur Mars
(Vue d'artiste)Caractéristiques Organisation Northern Light Consortium Domaine Exploration Type de mission Atterrisseur et astromobile Masse Atterrisseur : 35 kg
Rover :6 kgSource énergie Cellules photovoltaïques Informations générales Site marsrocks.ca Northern Light est un projet de sonde spatiale économique à destination de la planète Mars constituée d'un atterrisseur et d'un rover et proposé par un consortium d'universités canadiennes avec l'appui de la société canadienne Thoth Technology. Le coût du projet devrait être limité à 20 millions $ grâce au recours à des composants développés pour l'atterrisseur martien britannique Beagle 2. Initié en 2001 avec une date de lancement programmée en 2012, le projet de sonde Northern Light est en 2011 au point mort.
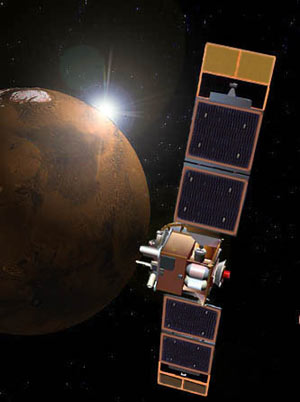
La projet prévoyait le développement d'un moteur d'apogée chargé d'assurer l'injection de la sonde sur une orbite orbite de transfert de Hohmann Terre-Mars. Northern Light devait comporter un étage de descente sur Mars comprenant un bouclier thermique, un parachute et un système de coussins gonflables, l'atterrisseur et le rover Beaver. L'atterrisseur et le rover ont une masse totale de 41 kg. L'atterrisseur comportait un dispositif qui lui permet de placer le rover sur le sol martien. Celui-ci était conçu pour pouvoir se déplacer d'un kilomètre et disposait d'outils et de capteurs lui permettant d'étudier les roches de surface qui peuvent contenir la présence de la vie photosynthétique. Les communications entre l'atterrisseur et l'équipe sur Terre devaient passer par l'antenne parabolique de 46 m du radiotélescope de l'Observatoire radio de l'Algonquin.
Sommaire
Historique
L'étude démarre officiellement en 2001, et son chef de projet est Ben Quine, de l'Université York, au Canada. Celle-ci joue un rôle important dans le Programme spatial canadien et a notamment conçu plusieurs instruments scientifiques et applications spatiales embarqués dans des missions de la NASA, dont la station météorologique à bord des sonde martienne Phoenix[1],[2].
Les partenaires de ce projet sont l'entreprise Thoth Technology Inc [3], basée à Kettleby, en Ontario. l'Université York, l'Université de l'Alberta, l'Université de Toronto, l'Université de Waterloo, l'Université de Winnipeg, l'Université de Western Ontario, l'Université de la Saskatchewan, l'Université du Nouveau-Brunswick, l'Université McGill et l'Université Simon Fraser[4]. Le contrôle de mission pour la période après l'atterrissage su Mars aurait son siège à l'Université York[5].
Une grande partie du matériel est basée sur l'atterrisseur britannique Beagle 2. Le coût est évalué à 20 millions de dollars, ou peut-être moins si un autre pays utilise le même lanceur[5]. Jusqu'à présent, l'Agence spatiale canadienne a confirmé qu'elle connaît le projet, mais elle n'est pas impliquée dans ce projet[5].
Objectifs scientifiques
Cette mission a quatre objectifs principaux[6]:
- Recherche de vie sur Mars,
- Recherche d'eau sur Mars,
- Recherche sur l'environnement électromagnétique martien et sur les propriétés de l'atmosphère,
- Préparation à l'effort international d'une mission de retour d'échantillons de Mars et d'une mission habitée vers Mars.
Charge utile du Beaver Rover
Le système mobile est requis pour l'exploration géologique de surface et pour l'imagerie du sous-sol. Avec une masse d'environ 6 kg, le rover est autonome avec une autonomie théorique d'environ 1 km. Le rover est équipé d'une caméra en lumière visible pour les manœuvres et l'exploration de surface, ainsi qu'un spectromètre et une caméra microscope pour l'étude géologique. Un radar à pénétration de sol explorera le sous-sol martien et cherchera de l'eau, un vibreur actif et receveur utilisera de courtes impulsions inférieures à la milliseconde pour mener une étude acoustique du sous-sol. Pour l'exploration immédiate du sous-sol, le rover sera équipé d'un outil de meulage de roche.
Capteur sismique MASSur Seismic Sensor
Le capteur sismique MASSur, développé par l'Université de Calgary et GENNIX Technology Corporation, fournira des profils en profondeur de la surface martienne. Plus précisément, un sismomètre effectuera des tests pour déterminer la rigidité et l'élasticité de la couche arable de Mars ainsi que ses propriétés de la roche. Les sédiments, le pergélisol, et l'eau peuvent tous avoir des signatures distinctes. Ce système sismique va utiliser une source de vibration et des récepteurs d'ondes élastiques (accéléromètres) à la fois sur l'atterrisseur et sur le Beaver Rover. La redondance des appareils de l'atterrisseur et du rover assure que certains objectifs scientifiques primaires peuvent être atteints sans le déploiement du rover.
Radar à pénétration de sol
Le radar à pénétration de sol (GPR) utilisera un radar de 200 MHz pour fournir à petite échelle l'imagerie du sous-sol jusqu'à une profondeur de 20 m en présence d'aggrégats mous et jusqu'à 100 m sur le pergélisol ou la glace. Il partage plusieurs systèmes avec les instruments sismiques[7].
Carottier TC Corer
Le carottier sera capable de forer jusqu'à 10 mm dans les roches de surface. Cet outil est utilisé en conjonction avec le spectromètre Aurora et un microscope pour examiner la composition proche de la surface et pour chercher des biosignatures près de la surface. La majeure partie de ces instruments est fournie par Hong Kong. L'instrument modélisant le vol pèse 350 g.
Charge utile de l'atterrisseur Northern Light
Spectromètre Aurora
Le spectromètre a une longueur d'onde de couverture de 625 nm à 2500 nm et observe le ciel tout entier. L'instrument permettra de mesurer les variations de l'irradiance spectrale qui peut être utilisée pour déterminer la composition des aérosols et de l’atmosphère, notamment de la concentration de dioxyde de carbone, le principal constituant de l'atmosphère martienne. Il mènera également la dépendance angulaire de l'afflux de rayonnement dans l'atmosphère. L'instrument Aurora a une masse de 450g[7].
Spectromètre Argus 4000
De conception similaire au spectromètre Argus 1000, embarqué sur CanX-2, le radiomètre sera l'équipement principal de l'atterrisseur Northern Light effectuant des mesures de réflectance spectrale de roche. Le spectromètre a une masse de 240g[7].
Caméras
Les systèmes de caméras de bord de l'atterrisseur ont la capacité de sondages de terrains étroits et larges. Le sondage de terrain étroit fournira une vue panoramique de très haute résolution sur le site d'atterrissage. Des filtres de couleur effectueront quelques cartographies spectrales et l'identification des minéraux du sol environnant; la caméra effectuera également des observations atmosphériques et astronomiques limitées[7]. Des images en couleur de la Terre seront obtenues.
Le sondage de terrain large fournira une vue d'ensemble en couleurs des environs de l'atterrisseur pour aider le déploiement du rover et la planification des itinéraires.
Capteur sismique MASSur
Le capteur sismique MASSur a des caractéristiques similaires à celui embarqué sur le rover Beaver.
Capteurs environnementaux
Des capteurs environnementaux surveilleront les conditions environnementales du site d'atterrissage. Divers équipements mesureront les rayonnements ultraviolet, les substances oxydantes, la pression atmosphérique, la température de l'air, les impacts de la poussière, la vitesse du vent et les vibrations du sol. Ces capteurs ont une masse combinée de 130 g. Les modèles de vol ont déjà été mis au point pour l'atterrisseur britannique Beagle 2.
Lancement
Le lancement de Northern Light devait avoir lieu dès 2012[8] si le financement pour le développement de la sonde et le lancement était trouvé.
Suivi
Le système d'entrée sera suivi et ciblé utilisant une combinaison de radar Doppler et d'interférométrie à très longue base. Ces données sont traitées par un modèle orbital de haute résolution qui utilise des éphémérides de haute précision pour prédire l'emplacement de l'engin spatial et sa trajectoire.
Lors du lancement, le suivi débutera à l'observatoire Algonquin Radio Observatory. Après injection en orbite, la sonde sera contactée régulièrement pour obtenir l'état du système et pour déterminer la trajectoire. Quand la sonde parviendra à la thermosphère martienne, le suivi continu débutera afin de vérifier le mécanisme de déploiement lors de la descente[9].
Site d'atterrissage
Le site d'atterrissage n'a pas encore été déterminé. Étant donné l'objectif de l'équipement à bord du vaisseau spatial, le site d'atterrissage sera plus que probablement être un endroit sec "mer", moins de 5 km d'une formation du bassin. Étant donné l'objectif de l'équipement à bord de la sonde, le site d'atterrissage sera plus que probablement une « mer » sèche, à moins de 5 km d'une cuvette de formation. La zone présumée servira comme site d'exploration, ainsi que comme zone potentielle où de la glace ou de l'eau liquide pourrait être trouvée.
Références
- Experiment aboard Space Shuttle Endeavour. York U press release. Retrieved 2008-05-22
- NASA Phoenix Mission to Mars. York U press release. Retrieved 2008-05-22.
- Thoth Technology Inc.
- University of Alberta joins mission to Mars, The Edmonton Journal (August 22, 2007). Consulté le 2009-07-27.
- Mission to Mars to be 100% Canadian, The Ottawa Citizen, CanWest MediaWorks Publications Inc. (August 22, 2007). Consulté le 2009-08-01.
- Four Science Themes, Thoth Technology Inc. (2009). Consulté le 2009-07-29.
- Northern Light Instrumentation, Thoth Technology Inc., 2009. Consulté le 2009-07-28
- Algonquin Radio Observatory readied as ground station for Northern Light mission, Thoth Technology Inc. (July 27, 2009). Consulté le 2009-07-28.
- The Algonquin Radio Observatory (ARO), Thoth Technology Inc., 2009. Consulté le 2009-07-28
- (en) Cet article est partiellement ou en totalité issu de l’article de Wikipédia en anglais intitulé « Northern Light (spacecraft) » (voir la liste des auteurs)
Voir aussi
Articles connexes
Liens externes
Catégories :- Exploration de Mars
- Sonde spatiale
- Programme spatial canadien
Wikimedia Foundation. 2010.