- Astromobile
-
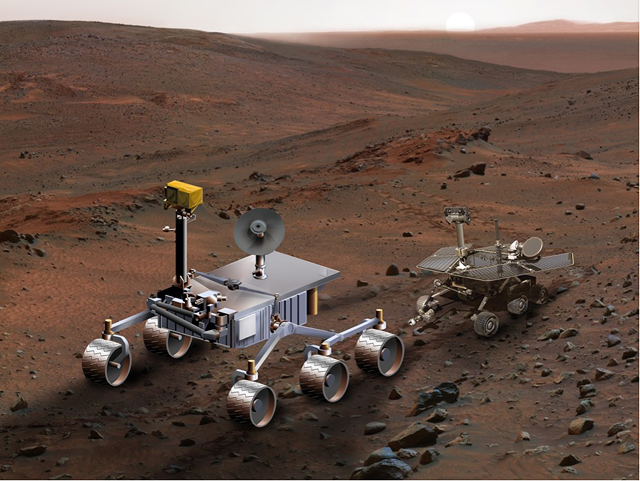
 Vue d'artiste de deux rovers sur le sol martien
Vue d'artiste de deux rovers sur le sol martien
Une astromobile, usuellement nommée rover[1] est un véhicule conçu pour explorer la surface d'une autre planète ou d'un corps céleste. Au cours de ses déplacements le rover mène des observations et des analyses de son environnement, souvent de façon quasi-autonome et guidé depuis la Terre. Certains comme le rover lunaire sont conçus pour transporter des membres d'équipage ou des échantillons de matériaux.
Sommaire
Caractéristiques générales
Le rover se distingue de l'atterrisseur par sa mobilité qui lui permet d'étudier une région plus étendue que celle du site d'atterrissage. Il peut être dirigé vers une zone intéressante aux reliefs contrastés qui ne permet pas d'atterrir en sécurité comme un cratère, un affleurement ou des rochers. Au delà des obstacles rencontrés sur le terrain, la mobilité du rover est aussi limitée par les conditions climatiques et d'ensoleillement. Il est souvent équipé de panneaux solaires qui lui fournissent l'énergie nécessaire à ses déplacements.
Contrairement à un orbiteur qui effectue des observations et des mesures depuis une orbite, le rover peut analyser physiquement les matériaux et roches en surface. En effet, il peut être équipé d'instruments scientifiques variés (spectromètre, foreuse, four, capteurs, appareils photographiques) qui permettent d'apporter des informations plus précis sur la composition des matériaux. La zone de prospection du rover se limite à une région proche du site d'atterrissage. Le choix d'utiliser un rover est audacieux car la phase d'atterrissage est particulièrement délicate et souvent la raison de l'échec de la mission.
La distance qui sépare le rover de la Terre ne permet pas de communiquer en temps réel. Dans le cas de la planète Mars comme sur la mission Mars Exploration Rovers, le temps du signal aller-retour peut atteindre une quarantaine de minutes suivant la possition des planètes. Le rover doit donc être conçu pour fonctionner de manière autonome et avec en général une aide reçu assez limitée.
Rovers sur la Lune
Programme soviétique Lunokhod
 Profil de la mission LunokhodArticles détaillés : Lunokhod 1 et Lunokhod 2.
Profil de la mission LunokhodArticles détaillés : Lunokhod 1 et Lunokhod 2.Durant les années 1960 les soviétiques développent dans le secret un rover lunaire nommé Lunokhod 1A et qui a pour ambition d'être le premier robot commandé sur la Lune. Une fusée lance le rover le 19 février 1969 mais une explosion d'un booster au décollage conduit à l'échec de la mission.
Une nouvelle tentative est effectuée en novembre 1970 avec la mission Luna 17 transportant le rover Lunokhod 1. Une fuséee Proton est lancée avec succès depuis Baikonour le 10 et atteint l'orbite lunaire cinq jour plus tard[2]. Après deux jours en orbite le rover atterrit sur la mare lunaire nommée Mare Imbrium et envoie le premier signal le 17 novembre. C'est le premier rover guidé depuis la Terre sur un corps céleste. Lunokhod 1 est un véhicule à 8 roues composé d'un caisson principal à large couvercle, d'antennes, de caméras vidéos et d'instruments pour analyser le sol. L'alimentation électrique est fournie par des panneaux solaires et le rover est conçu pour fonctionner durant trois jours lunaire[3]. Du 17 au 22 novembre le rover parcourt 197 m et au cours de 10 séances de communication transmet 14 images rapprochées de la Lune et 12 vues panoramiques. Il a analysé la surface lunaire durant 11 mois en effectuant plusieurs centaines de tests. À cette période le dernier contact avec Lunokhod 1 est obtenu le 14 septembre 1971[2].
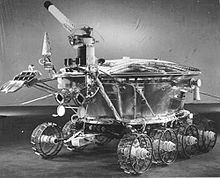 Lunokhod 1
Lunokhod 1Le 8 janvier 1973, la sonde Luna21 transportant le rover nommé Lunokhod 2 est lancée avec succès en direction de la Lune. Les caractéristiques de ce rover sont similaires à celles de Lunokhod 1 -une masse de 840 kg, 1,7 m de long pour 1,6 m de large et monté sur 8 roues, mais est équipé d'un appareil photographique de qualité pour obtenir des vues panoramiques et une meilleure représentation de la topographie lunaire. L'alimentation électrique est fournie par des panneaux solaires et une source de chaleur radioactive fonctionnant au polonium-210 permet de limiter la chute de température du rover qui a lieu durant la nuit[4]. La sonde se place sur orbite lunaire le 12 et réussi son atterrissage le 16 janvier 1973 sur la bordure orientale de la région de Mare Serenitatis. C'est le deuxième rover contrôlé depuis la Terre à se poser sur un corps céleste. Lunokhod 2 reste opérationnel pendant environ 4 mois à analyser le sol lunaire parcourant au total près de 37 km sur divers reliefs comme de petites collines et renvoie vers la Terre 86 images panoramiques ainsi que plus de 80 000 images de qualité.
Programme américain Apollo
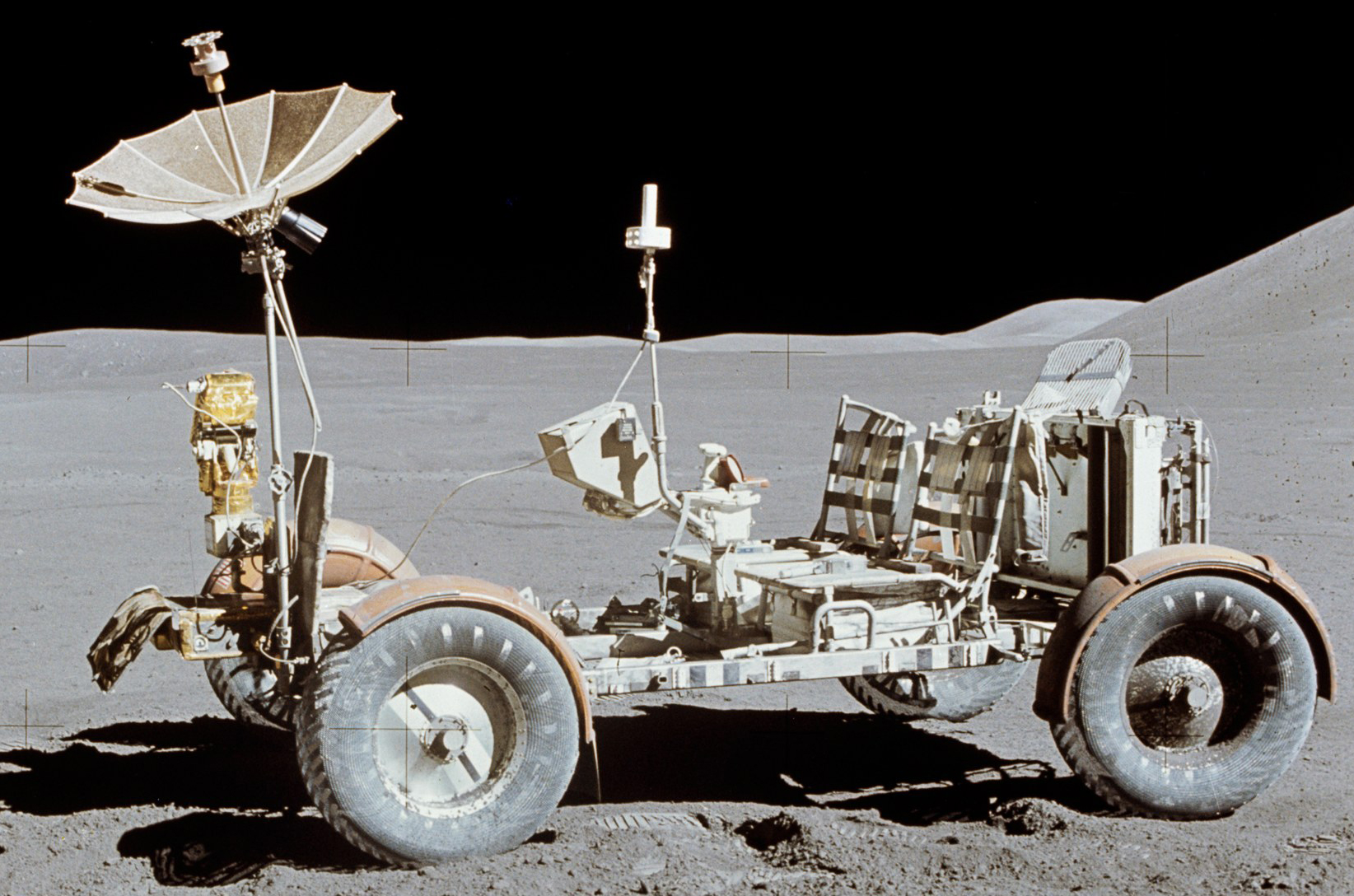
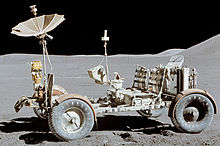 Rover lunaire de la mission Apollo 15Article détaillé : rover lunaire.
Rover lunaire de la mission Apollo 15Article détaillé : rover lunaire.Au début des années 1970 la NASA développe un rover lunaire dans le cadre du programme Apollo de manière à faciliter l'exploration de la surface de la Lune. Le rover est un véhicule électrique fabriqué à plusieurs exemplaires pouvant transporter du matériel et des astronautes. Le premier rover lunaire est piloté par les astronautes David Scott et James Irwin, le 31 juillet 1971 au cours de la mission Apollo 15 et ils parcourent au total plus de 27 km en 3 heures. C'est un véhicule biplace à quatre roues, de 3 mètres de long et d'une masse d'environ 200 kg à vide. Le châssis fabriqué en alliage d'aluminium est conçu en trois parties reliées au centre du rover de façon à pouvoir être plié dans le Module lunaire. Deux autres rovers similaires ont été utilisés sur la Lune lors des missions Apollo 16 et 17, parcourant au total respectivement 26,7 km et 35,9 km. Ces rovers ont été très utiles et les découvertes réalisées lors de ces missions n'auraient probablement pas été possibles sans eux[5].
Rovers sur Mars
Prop-M
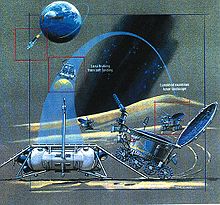
La mission soviétique Mars 3 est constituée d'un orbiteur et d'un atterrisseur qui est associé à un petit rover nommé Prop-M. Lancée avec succès le 28 mai 1971, l'atterrisseur effectue sa descente vers la surface martienne le 2 décembre de la même année[6]. Après l'atterrissage il transmet un signal durant une vingtaine de seconde puis le signal est définitivement perdu. La raison de ce silence radio reste inexpliquée. L'atterrisseur devait ensuite placer le petit rover sur la surface martienne à l'aide d'un bras manipulateur. Prop-M est un véhicule de seulement 4,5 kg relié à l'atterrisseur par un cable et monté sur une paire de « skis ». Il est conçu pour parcourir environ 15 m en effectuant des mesures du sol tous les 1,5 m, les traces laissées par le déplacement du rover sur le sol devaient être photographiées pour être analysées[7].
Sojourner
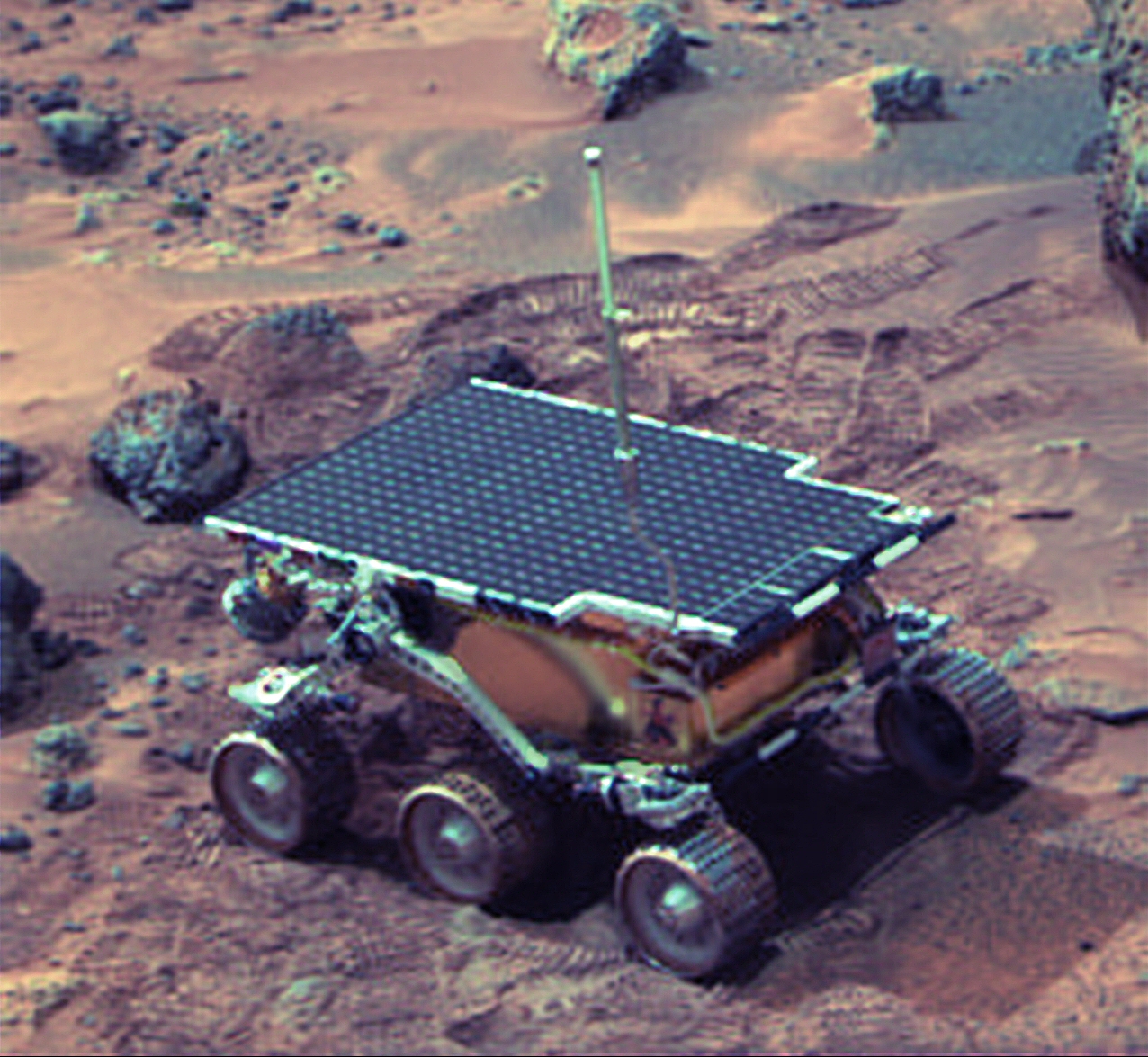
 Le rover SojournerArticle détaillé : Mars Pathfinder.
Le rover SojournerArticle détaillé : Mars Pathfinder.La mission américaine Mars Pathfinder est composée d'un atterrisseur fonctionnant en station d'étude fixe et d'un rover nommé Sojourner. La sonde est lancée le 4 décembre 1996 et l'atterrisseur atteint la surface martienne le 4 juillet 1997 dans la vallée Ares Vallis. Guidé par un opérateur sur Terre le rover quitte deux jours martiens plus tard l'atterrisseur et est opérationnel sur la surface. Il devient alors le premier rover à s'être déplacé sur une autre planète. Sojourner est un petit véhicule de 65 cm de long et de 10,5 kg. Il forme un petit caisson de forme rectangulaire supporté par six roues montées sur suspensions et est recouvert d'un panneau solaire sur le dessus de 0,2 m2 qui lui fournit l'énergie suffisante pour se déplacer plusieurs heures par jour. Le cout du rover est estimé à environ 25 MUSD[8]. Le rover a cessé toute communication le 27 septembre 1997 pour une raison inconnue mais a transmis durant son activité 550 images et contribué à de nombreuses analyses de roches et observations du site d'atterrissage.
Spirit et Opportunity
 Le rover Spirit, au centre spatial Kennedy (mars 2003)Articles détaillés : Spirit et Opportunity.
Le rover Spirit, au centre spatial Kennedy (mars 2003)Articles détaillés : Spirit et Opportunity.La NASA lance le 10 juin et le 7 juillet 2003 deux rovers « géologues » nommés Spirit et Opportunity dans le cadre de la mission Mars Exploration Rover. Ils atterrissent tous les deux avec succès en janvier 2004 sur deux régions opposées de la planète Mars, le cratère Gusev et la plaine Meridiani Planum. Les deux rovers sont conçus de la même façon avec une masse d'environ 185 kg et équipés de six roues motorisées qui sont alimentées par des batteries lithium-ion restituant l'énergie fournie par leurs panneaux solaires de 1,3 m2. L'équipement est composé d'un ensemble d'outils qui permet d'effectuer de la détection à distance (photographie, spectromètre thermique) ou des mesures in-situ (abrasion, spectromètre X et Mössbauer). Des séquences de commandes sont envoyées de la Terre pour guider les rovers à partir des images et résultats reçus régulièrement de Mars. À l'origine conçu pour une mission d'étude de 90 jours martiens, les deux robots sont encore opérationnels six ans après leur atterrissage. Spirit n'a cependant pas envoyé un seul signal depuis le 22 mars 2010, probablement dans un état d'hibernation l'augmentation de l'ensoleillement à la fin de l'hiver martien pourrait désactivé ce mode[9]. Bien que fonctionnant en station fixe depuis 2009, le rover a parcouru plus de 7,7 km depuis son arrivée. Opportunity se déplace depuis septembre 2008 en direction du cratère Endeavour, surpassant le précédant record de longévité détenu par l'atterrisseur Viking 1 avec 6 ans et 116 jours[10]. Fin juillet 2010, il a exploré depuis son atterrissage près de 22 km[11].
Référence
- Droit français : arrêté du 20 février 1995 relatif à la terminologie des sciences et techniques spatiales.
- (en) Robert Christy, « The Mission of Luna 17 » sur zarya. Consulté le 1er aout 2010.
- (en) Artem Ivankov, « Luna 17/Lunokhod 1 » sur NASA -NSSDC. Consulté le 1er aout 2010.
- (en) Artem Ivankov, « Luna 21/Lunokhod 2 » sur NASA -NSSDC. Consulté le 1er aout 2010.
- (en) David R. Williams, « The Apollo Lunar Roving Vehicle » sur NASA -NSSDC. Consulté le 1er aout 2010.
- (en) Artem Ivankov, « Mars 3 » sur NASA -NSSDC. Consulté le 1er aout 2010.
- (en) Fast Facts, « Mars 3 » sur NASA -Solar System Exploration. Consulté le 1er aout 2010.
- (en) David R. Williams., « Mars Pathfinder Rover » sur NASA -NSSDC. Consulté le 1er aout 2010.
- (en) Guy Webster, « NASA's Hibernating Mars Rover May Not Call Home » sur NASA -News and Features. Consulté le 1er aout 2010.
- (en) Dwayne Brown, « NASA's Mars Rovers Set Surface Longevity Record » sur NASA. Consulté le 1er aout 2010.
- (en) JPL, « Update: Spirit and Opportunity » sur NASA -NSSDC. Consulté le 1er aout 2010.
Voir aussi



Wikimedia Foundation. 2010.