- Théorème de Pappus
-
Le théorème de Pappus est un théorème de géométrie projective plane qui possède plusieurs déclinaisons en géométrie affine. En géométrie projective Il s'énonce uniquement en termes d'alignements de points et d'intersections de droites, et se démontre dans n'importe quel plan projectif construit sur un corps commutatif.
Dans une approche axiomatique de la géométrie projective, il peut être pris comme axiome et caractérise alors, parmi les plans vus comme structure d'incidence, ceux qui peuvent être construit sur un corps commutatif, de même en géométrie affine pour l'avatar affine du théorème de Pappus (voir plan affine arguésien). Il a pour conséquence l'axiome de Desargues qui se déduit des axiomes d'incidence et de l'axiome de Pappus par le théorème de Hessenberg.
Sommaire
Énoncé du théorème
 Théorème de Pappus
Théorème de Pappus
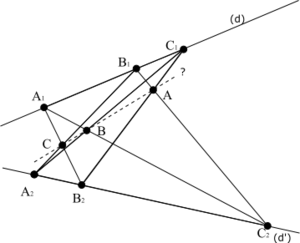
Dans un plan, soient A1, B1, C1 trois points distincts alignés sur une droite (d) , et soient A2, B2, C2 trois autres points distincts alignés sur une autre droite
 alors les points
alors les points- A intersection de (B2C1) avec (C2B1)
- B intersection de (A2C1) avec (C2A1)
- C intersection de (A2B1) avec (B2A1)
sont alignés.
Il s'agit d'un théorème de géométrie projective donc les points considérés peuvent être propres ou impropres. Dans le cas où tous les points sont propres, on obtient une configuration du type ci-contre.
Remarques :
si l'on note (Δ) la droite portant les points A,B,C alors les assertions suivantes sont équivalentes (en géométrie projective) :
-- les trois droites (d),
et (Δ) sont concourantes ;-- les trois droites (A1A2) (B1B2) (C1C2) sont concourantes ;
-- les six droites « croisillons » (B2C1) (C2B1) (A2C1) (C2A1) (A2B1) (B2A1) sont tangentes à une même conique.
-- Les deux droites (d) et
peuvent être considérées comme une conique dégénérée : pour l'hexagramme A1B2C1A2B1C2, le théorème de Pappus-Pascal affirme l'alignement des points A, B et C.
Démonstration à l'aide des applications projectives
 Démonstration du théorème
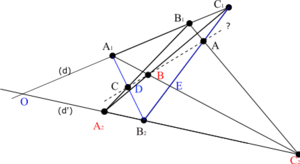
Démonstration du théorèmeOn construit les points O intersection de (d) et (d'), D intersection de (A1B2) et (A2C1) et E intersection de (A1C2) et (C1B2)
On considère la projection centrale p de la droite (A1B2) sur la droite (d) de centre A2
- A1 a pour image A1
- C a pour image B1
- D a pour image C1
- B2 a pour image O
On considère la projection centrale q de la droite (d) sur la droite (B2C1) de centre C2
- A1 a pour image E
- B1 a pour image A
- C1 pour image C1
- O a pour image B2
Par l'application projective q o p de la droite (A1B2) sur la droite (B2C1)
- A1 a pour image E
- C a pour image A
- D a pour image C1
- B2 a pour image B2
Si on regarde maintenant la projection centrale r de la droite (A1B2) sur la droite (B2C1) de centre B
- A1 a pour image E
- D a pour image C1
- B2 a pour image B2
Or, une application projective d'une droite sur une autre est entièrement déterminée par l'image de trois points distincts. Les transformations q o p et r coïncident sur A1, D et B2. Elles sont donc égales et r(C) = A. Les points A, B et C sont donc alignés.
Démonstration en géométrie affine par le théorème de Ménélaüs
 Démonstration du théorème de Pappus à l'aide de Ménélaüs
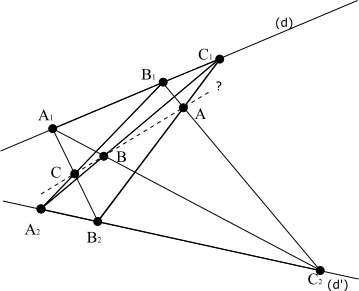
Démonstration du théorème de Pappus à l'aide de MénélaüsLe théorème a plusieurs avatars affines qui se déduisent chacun de la version projective par choix d'une droite à l'infini. On suppose ici comme ci-dessus que les 2 triplets de points distincts (A1, B1, C1) d'une part, (A2, B2, C2) d'autre part, sont chacun alignés sur deux droites distinctes. On ajoute comme condition que (B2C1) et (C2B1) sont sécantes (en A), ainsi que (A2C1) et (C2A1) (en B), et que (A2B1) et (B2A1) (en C). On en déduit par le théorème de Pappus que A, B et C sont alignés.
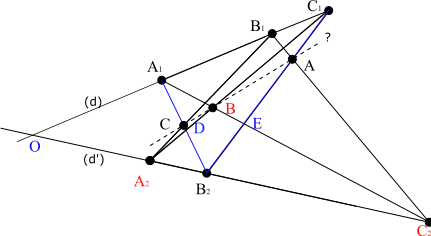
En voici une démonstration directe en géométrie affine, moyennant quelques conditions supplémentaires, à savoir que (A2B1) et (B2C1) sont sécantes en J1, (B2C1) et (A1C2) en L1, (A2B1) et (A1C2) en K1.
Les trois points ainsi définis sont alors distincts et non alignés et définissent le triangle (en bleu sur la figure) J1K1L1.
- la droite (A1C1) intersecte les trois côtés du triangle en A1, B1, C1
- la droite (A2C2) intersecte les trois côtés du triangle en A2, B2, C2
- la droite (B1C2) intersecte les trois côtés du triangle en B1, A, C2
- la droite (A2C1) intersecte les trois côtés du triangle en A2, B, C1
- la droite (A1B2) intersecte les trois côtés du triangle en A1, C, B2
D'après Ménélaüs, ces alignements se traduisent par les égalités suivantes :
En multipliant membre à membre ces cinq égalités, il reste après simplification :ce qui prouve d'après la réciproque de Ménélaüs l'alignement des trois points A, B et C.
Une démonstration analogue peut être faite, en modifiant les conditions supplémentaires, avec le triangle J2K2L2 (en rouge sur la figure). Dans ce cas, les trois droites (B1C2), (A2C1) et (A1B2) (en rouge sur la figure) échangent leur rôle avec les trois droites (B2C1), (A1C2) et (A2B1) (en bleu sur la figure).
On déduit la version projective du théorème de Pappus de cette version affine en choisissant judicieusement dans le plan projectif une droite à l'infini, pour se ramener au plan affine de façon à vérifier toutes les conditions du théorème démontré par Ménélaüs.
Notions connexes
- Le théorème de Hessenberg fait le lien entre le théorème de Pappus et le théorème de Desargues.
- Le théorème de Pappus affine dans le plan affine.
- L'hexagramme de Pascal dont la configuration de Pappus est une version dégénérée (la conique est une bidroite).
- Graphe de Pappus
- Enfin il est indispensable de rappeler que la configuration de Pappus est un bel exemple de dualité.
Sources
- Leçons de géométrie projective de F. Enriqués
- Petite encyclopédie de mathématiques Ed. Didier
- Enfin un site où sont donnés de nombreux développements sur le Thèorème de Pappus:Merveilleux Pappus
Catégories :- Théorème de géométrie
- Géométrie projective
- Ligne droite







Wikimedia Foundation. 2010.