- Quadrirotor
-
 Le X-UFO, jouet radio-commandé quadrirotor.
Le X-UFO, jouet radio-commandé quadrirotor.
Un quadrirotor est un aéronef à voilure tournante comportant quatre rotors pour sa sustentation. Les quatre rotors sont généralement placés aux extrémités d'une croix. Afin d'éviter à l'appareil de tourner sur lui-même sur son axe de lacet, il est nécessaire que deux hélices tournent dans un sens et les deux autres dans l'autre sens.
Pour pouvoir diriger l'appareil, il est nécessaire que chaque couple d'hélice tournant dans le même sens soit placé aux extrémités opposées d'une branche de la croix.
Sommaire
Histoire
 Le quadrirotor de de Bothezat, 1923
Le quadrirotor de de Bothezat, 1923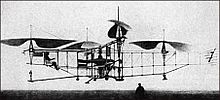 L'appareil N°2 d'Œhmichen, 1923Article détaillé : Histoire de l'hélicoptère et des voilures tournantes.
L'appareil N°2 d'Œhmichen, 1923Article détaillé : Histoire de l'hélicoptère et des voilures tournantes.Suite à un contrat engagé par l'armée américaine en janvier 1921, c'est l'américain d'origine russe George de Bothezat qui fut le premier à faire voler un appareil quadrirotor[1]. Il réussit son premier vol en octobre 1922 et réalise un vol de 1 minute 42s à 1,8 m du sol le 18 décembre 1922. Le 19 janvier 1923, l'appareil emporte deux personnes à 1,2 m du sol[1]. De nombreux vols furent effectués en 1923 mais l'appareil ne s'élevera pas au dessus de 5 mètres et l'armée mettra fin au contrat.
En Europe, le quadrirotor du français Étienne Œhmichen, construit en 1922, réussit un vol stationnaire de cinq minutes en juin 1923. En mai 1924, il monte à plus de dix mètres d’altitude et effectue une boucle complète sur un kilomètre en sept minutes et quarante secondes devant le capitaine Cholat de l'Aéro-Club de France. En sus des quatre rotors de sustentation, le type n°2 d'Œhmichen était doté de huit hélices de direction.
Ces deux ingénieurs auront été les premiers à avoir réalisé des quadrirotors qui ont réellement volé. En 1907, Louis Charles Breguet avait construit un quadrirotor qu'il appelait Gyroplane, mais l'appareil, dépourvu de commandes, ne fit que des sauts.
Aujourd'hui, en 2010, des quadrirotors sont proposés comme maquettes téléguidées.
Fonctionnement
Le fonctionnement d'un quadrirotor est assez particulier. On distingue quatre mouvements possibles : les gaz, le lacet, le roulis et le tangage. Pour garder le contrôle du lacet, cela implique que deux hélices tournent dans le sens horaire (hélice à pas normal) et les deux autres dans le sens antihoraire (hélices à pas inversé).
Les gaz
Le mouvement de gaz correspond tout simplement à la montée/descente du quadrirotor. La montée est obtenue en augmentant la vitesse des quatre moteurs. La descente, qui elle est plus difficile à doser, s'obtient par la réduction de la vitesse des moteurs.
Le lacet
Le mouvement de lacet sert à faire touner le quadrirotor sur lui même. Il est obtenu en augmentant la vitesse des hélices à pas normal et en diminuant proportionnellement la vitesse des hélices à pas inversé.
Le roulis et le tangage
Le roulis et le tangage sont des mouvements assez similaires visant à pencher le quadrirotor sur un axe ou sur un autre. Ce mouvement est obtenu en augmentant la vitesse d'une hélice et en abaissant proportionnellement la vitesse de l'hélice opposée (hélice du même couple).
Notes et références
- (en) De Bothezat helicopter - All the World's Helicopters and Rotorcraft
Annexes
Article connexe
Lien externe
Catégorie :- Technique d'hélicoptère



Wikimedia Foundation. 2010.