- Hélicoptère RC
-
Hélicoptère radiocommandé
 Class 30
Class 30
Un hélicoptère radiocommandé (RC) est un modèle réduit d'aéronef dont les caractéristiques sont différentes d'un avion radiocommandé du fait de différences de construction, d'aérodynamique et d'expériences de vol.
L'hélicoptère radiocommandé est une machine à mécanique complexe, qui contrairement à d'autres machines volantes, permet d'effectuer des vols dans toutes les directions (translations avant, arrière, lattérales) et de rester parfaitement immobile (vol stationnaire) au-dessus d'un point. De plus, ces hélicoptères radiocommandés, dans les mains de pilotes confirmés, sont capables de réaliser des prouesses (vol 3D ou voltige) qui ne sont pas réalisables avec des hélicoptères grandeur nature (sauf exceptions, comme Le Tigre d'Eurocoptere capable de véritables exploits).Sommaire
Histoire
Les premiers modèles réduits d'hélicoptères à moteur (mécanisme d'horlogerie ou ressort) ont existé dès le XVIIIe siècle, mais ils n'étaient évidemment pas radiocommandés. Après une longue phase de recherche, c'est en 1907 que l'hélicoptère a été capable de se soulever avec un pilote, pour véritablement prendre son essor après 1945, éclipsant les modèles réduits.
Le premier véritable hélicoptère radiocommandé a été conçu en 1969 par Dieter Schlüter[1]. Ce modèle a gagné le concours Harsewinkel (Allemagne) pour lequel l'inventeur toucha 1 000 DM. Il a réussi à faire voler son hélicoptère sur deux vols de 5 secondes, à 3 mètres du sol. Le premier modèle commercialisé a été le Bell Huet cobra Schlüter, qui a établi un nouveau record (non officiel) avec un vol de 10 minutes 36 secondes. Le record officiel, de juin 1970, avec ce même modèle a été de 27 minutes 51 secondes de vol sur un circuit de 11,5 km. Le Twin Jet de Graupner équipé d'un moteur thermique de 10 cm3 et du pas collectif a été le premier hélicoptère radiocommandé à traverser la Manche[2]. Ensuite, de nombreux modèles ont été commercialisés avant d'en arriver aux hélicoptères actuellement sur le marché.
Depuis, de nombreux prototypes ont été construits et testés jusqu'en 1980, date à partir de laquelle les hélicoptères radiocommandés Graupner ont fait leur apparition. L'utilisation de ces engins est devenue accessible à un large public à partir de 2000, où des marques comme Nikko ont conçu des hélicoptères électriques relativement bon marché et peu puissants pour le vol en intérieur ou dans un jardin.
Fonctionnement
Fonctionnement aérodynamique
 Plateau cyclique – Vue plongeante d'un plateau simple de modèle réduit
Plateau cyclique – Vue plongeante d'un plateau simple de modèle réduit
1 couronne fixe (bleu)
2 couronne mobile (argent)
3 roulement
4 tige de commande (tangage)
5 tige de commande (roulis)
6 biellette de pas (vers la pale)Un hélicoptère radiocommandé fonctionne comme un hélicoptère de taille normale : le rotor est l'hélice principale qui permet la sustentation, il est commandé par le plateau cyclique. Le rotor anticouple ou les rotors contrarotatifs sont les dispositifs destinés à empêcher l'hélicoptère de tourner en sens inverse du rotor principal.
Commandes de vol
Les divers contrôles de l'hélicoptère sont assurés par de petits moteurs servocommandés. La radiocommande doit pouvoir gérer :
- la vitesse angulaire du rotor principal (couramment appelée « commande des gaz », elle contrôle la vitesse ascensionnelle donc l'altitude) ;
- le plateau cyclique (commande de tangage et de roulis, ainsi que la vitesse ascensionnelle lorsque l'hélicoptère est équipé d'un pas collectif) ;
- le dispositif anticouple (commande de lacet).
La commande du plateau cyclique se fait au moyen de la commande de pas général (aussi appelée pas collectif) tenue par la main droite du pilote sur la télécommande. La commande des gaz et du pas est généralement multiplexée sur la même voie de la télécommande. Dans le cas d'un hélicoptère à pas fixe, seuls les gaz permettent de contrôler l'altitude de l'aéronef.
Le contrôle du lacet se fait généralement à l'aide du rotor anticouple par changement du pas ou de la vitesse de rotation du rotor de queue. Un gyroscope peut constituer une aide au pilotage en stabilisant le lacet de l'hélicoptère.
Ces différentes commandes permettent de faire effectuer à l'hélicoptère la plupart des manœuvres d'un avion et d'autres qui ne lui sont pas possibles, comme le vol stationnaire et en marche arrière, ils sont ainsi similaires aux vrais hélicoptères[3].
Hélicoptère birotor contrarotatif
Voir aussi Rotors contrarotatifsAvec deux rotors de sustentation coaxiaux (tournant autour du même axe) comme le Dragonfly 53 et le Micro 47G. Ces hélicoptères sont particulièrement destinés à l'apprentissage du pilotage d'hélicoptère radiocommandé. Ils sont plus stables et plus simples à contrôler que les hélicoptères normaux. Ils possèdent deux rotors superposés tournant en sens inverse et ne possèdent pas de rotor de queue.
 Hélicoptère birotors coaxiaux contrarotatifs : schéma vue de dessus
Hélicoptère birotors coaxiaux contrarotatifs : schéma vue de dessusHélicoptère birotor en tandem
 Hélicoptère radiocommandé à deux rotors en tandemVoir aussi l'article Rotors contrarotatifs
Hélicoptère radiocommandé à deux rotors en tandemVoir aussi l'article Rotors contrarotatifsCe modèle possède deux rotors de sustentation en tandem (l'un derrière l'autre). Ce système dans lequel les rotors tournent en sens inverse permet d'annuler le couple de réaction du rotor sur la cellule. Son principal promoteur a été l'Américain Frank Piasecki.
Types de vol
Les hélicoptères radiocommandés ont un fonctionnement presque identique à celui des hélicoptères.
Aspect physique
Comme pour l'avion, la vitesse relative de l'air et de la voilure génère une action mécanique qui permet à l'engin de voler. On distingue deux composantes de cette action aérodynamique :
- la traînée qui est la résistance à l'avancement. De son action sur le rotor de l'hélicoptère, il résulte un couple tendant à faire tourner l'appareil autour de son axe, d'où la nécessité d'un dispositif anticouple.
- la portance qui soulève l'appareil.
Le contrôle d'un appareil repose alors sur la gestion de cette portance. Alors que sur les avions, des gouvernes permettent de modifier la portance des ailes pour virer, monter..., sur l'hélicoptère, comme sur les éoliennes, on modifie le pas et l'inclinaison des pales. Cependant, il existe une différence. Si sur l'avion on agit individuellement sur chaque gouverne, sur l'hélicoptère on contrôle la portance d'une pale suivant sa position par rapport à l'appareil. C'est le rôle du plateau cyclique, pièce principale du dispositif de commande de vol.
Certains types sont plus manœuvrables que d'autres (comme les hélicoptères à pas collectif). Les modèles les plus manœuvrables sont souvent les plus compliqués à faire voler, mais bénéficient de meilleures capacités acrobatiques.
Déplacements
Vol stationnaire
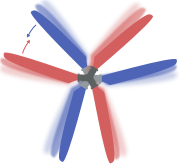
Le rotor de l'hélicoptère étant entraîné à vitesse constante, les déplacements verticaux de l'hélicoptère sont obtenus par la seule modification du pas des pales. À ce stade du vol, la portance des pales reste identique sur un tour du rotor.
Il existe une position où la portance globale s'oppose exactement au poids de l'appareil : l'hélicoptère peut rester immobile. Si elle lui est inférieure, l'appareil descend. Si elle est supérieure, il monte.Vol en translation
Pour que l'hélicoptère avance, une force à composante horizontale est nécessaire. Si on augmente la portance des pales lorsqu'elles passent derrière le rotor, leur plan de rotation s'incline vers l'avant, grâce à une articulation en battement reliant chaque pale à l'axe de rotation, et l'inclinaison de la portance produit la composante horizontale nécessaire. Il reste toutefois une composante verticale principale qui s'oppose au poids permettant le maintien en l'air, et la composante horizontale motrice engendre le mouvement d'avancement, donc accélération jusqu'à une vitesse où la traînée globale (résistance à l'avancement de l'hélicoptère) s'équilibrera avec la composante motrice.
Le principe est le même quelle que soit la direction de déplacement souhaitée.

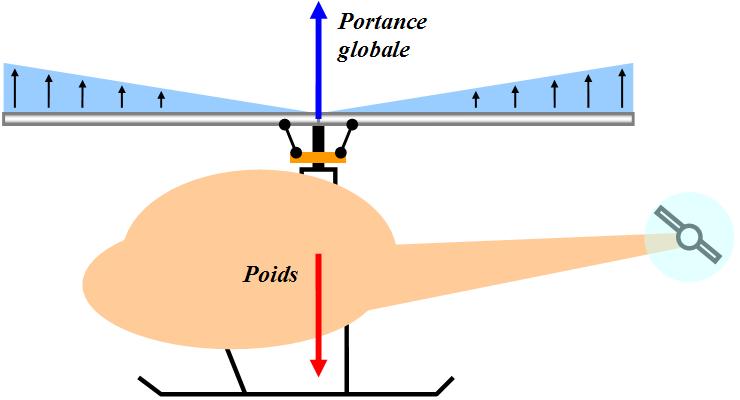
Équilibre en vol stationnaire : la portance et le poids s'annulent

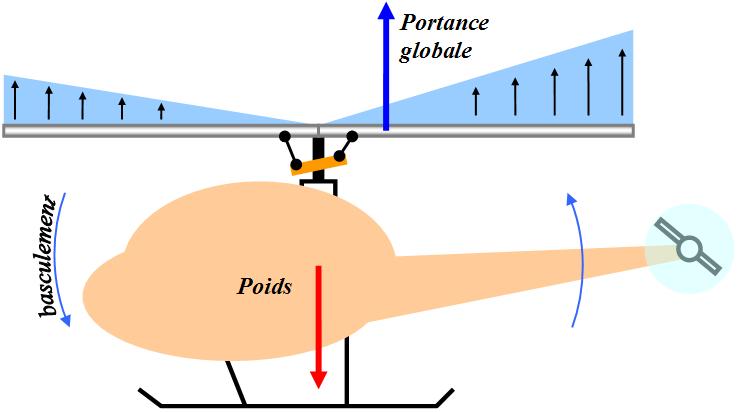
Déséquilibre : la queue va vers le haut, l'hélicoptère est déséquilibré
Déplacement stabilisé : la traînée s'ajoute à la portance et au poids ; l'hélicoptère avance
Autorotation
Article connexe : Autorotation.Cette phase est une procédure d'urgence en cas de panne du moteur entraînant le rotor principal. Le principe est de passer en mode autogire : dans ce mode, les pales tournent spontanément sous l'effet du vent relatif produit par la chute (de bas en haut, du point de vue de l'hélicoptère) en produisant une portance qui freine significativement la chute de l'aéronef à l'approche du sol, et permet ainsi de limiter la casse. Pour cela, une commande permet d'inverser le pas collectif. Cela reste une manœuvre délicate, car l'orientation optimale des pales dépend des circonstances (vitesse de chute, vitesse actuelle des pales, ...) et le succès n'est pas garanti, même si en théorie le simple fait de laisser les pales en mode libre suffit.
Sur un hélicoptère modèle réduit, l'autorotation n'en est pas vraiment une ; c'est plutôt le phénomène de moulinet-frein (rotor entraîné par l'air de bas en haut avec le pas négatif) alors que sur les hélicoptères grandeur nature, l'autorotation est une force d'entraînement du rotor (force autorotative) par les filets d'air de haut en bas sur la partie du disque rotor externe et de bas en haut (force anti-autorotative) sur la partie interne du disque, et ceci pour un pas positif : le « pas mini » calé par le constructeur. La vitesse du rotor est auto-régulée et déterminée pas le taux de chute, la masse et les paramètres dynamiques de l'appareil (rotor et pales).
Fabrication
Matériaux
- Les bois (balsa, samba, contreplaqué, pin...), sont utilisés pour les fuselages des hélicoptères thermiques, les bois légers étant préférés aux bois comme le pin utilisés uniquement comme structure rigidifiante ;
- Les métaux se retrouvent dans les tubes, les tiges de commandes plus ou moins rigides, voire pour la construction de l'aéronef lui-même (aluminium, et même titane) ;
- Les résines, comme colles, enduits, servent à l'entoilage des structures (comme l'enduit nitro-cellulosique), ou, avec des tissus de fibre synthétique, à la construction de fuselages ou d'ailes ;
- Les polystyrènes sont utilisés pour certaines constructions plus lourdes mais plus rapides d'ailes ;
- Les cartons et papiers divers sont aussi utilisés ;
- Le kevlar, le carbone, le tissu de verre, sont aussi couramment utilisés pour les fuselages ;
- Le depron est de plus en plus répandu ;
- L'EPP (polypropylène expansé) est de plus en plus utilisé pour la réalisation de modèles de petite à moyenne taille très résistants au choc, pour l'apprentissage ou le vol de pente.
Les hélicoptères contiennent nombre de pièces mobiles, comme le plateau cyclique qui permet l'inclinaison du rotor contrôlant la direction.
La construction d'un hélicoptère demande plus de précision que celle d'un avion car les hélicoptères, même les plus petits, subissent d'importantes vibrations qui peuvent poser des problèmes lors du vol.
Motorisation
Moteur à air comprimé
Les moteurs à air comprimé sont peu utilisés. On les trouve surtout en vol libre.
Moteur à explosion
 Align T-REX 600, hélicoptère à moteur électrique
Align T-REX 600, hélicoptère à moteur électriqueLes moteurs à explosion ou « thermiques » (généralement des monocylindres 2 temps) sont souvent utilisés, certains pouvant être à eux seuls des maquettes remarquables (moteurs en étoile, multicylindres en ligne ou en V pour les avions) ; les moteurs de la marque O.S. sont très répandus grâce à leurs qualités exceptionnelles (ils calent rarement)[4]. Ils peuvent être alimentés au méthanol (auto-allumage à bougie à incandescence), voire à l'essence (bougie classique à étincelle).
Les moteurs à méthanol sont souvent utilisés avec du carburant contenant du nitrométhane (CH3NO2) de quelques % à 20 ou 25 % en compétition (augmentation notable des performances, puissance et refroidissement accrus dus au nitrométhane). Les hélicoptères « thermiques » au méthanol existent en diverses cylindrées, 0,30, 0,50, 0,60 et 0,90 pouces cubes (4,92, 8,19, 9,83 et 14,75 cm3, respectivement). Plus le moteur est gros, plus il permet d'entraîner un rotor dont les pales sont longues et donc permettent la sustentation d'un appareil globalement plus gros et plus lourd. On parle ainsi de diverses « classes » d'hélicoptères : classe 30 (moteur 28 à 32, diamètre rotor 1 m à 1,20 m, 3 à 4 kg), classe 50, classe 60 et classe 90 (jusqu'à 1,80 m de diamètre rotor pour 5 ou 6 kg).
Les hélicoptères à motorisation thermique sont actuellement plus courants que ceux à moteur électrique dont le développement est plus récent mais dont le succès est croissant.
Moteur électrique
 Le Picoo Z, le plus petit hélicoptère radiocommandé au monde
Le Picoo Z, le plus petit hélicoptère radiocommandé au mondeLes moteurs électriques (notamment les moteurs brushless ou sans balais) sont de plus en plus utilisés, grâce aux progrès des accumulateurs. Les batteries lithium polymère de haute performance sont de plus en plus utilisées.
Les derniers développements technologiques en matière de batteries ont permis d'augmenter l'autonomie de vol des modèles électriques. Cependant, il existe un risque de surchauffe et d'explosion de ces nouvelles batteries au lithium polymère[5].
Les hélicoptères RC électriques ont d'abord été utilisés en intérieur, puisqu'ils n'émettent aucune fumée ni gaz toxique. De plus grands hélicoptères électriques sont maintenant fabriqués pour un usage à l'extérieur, offrant des dispositions intéressantes pour le vol acrobatique, ils deviennent populaires. Leur faible niveau sonore les rend particulièrement adaptés pour le vol en milieu résidentiel où les émissions de bruit peuvent être limitées, comme en Allemagne par exemple. Il existe des kits de transformation d'hélicoptères « thermiques » en modèles électriques.
Le plus petit hélicoptère RC[6] est le Picoo Z, suivi du Micron FP helicopter, tous deux sont munis d'un moteur électrique fonctionnant sur batteries.
Turbine
- Turbine à gaz : moteur développé selon les techniques des hélicoptères grandeur nature. Initialement alimentés par du gaz propane, ils sont maintenant alimentés par des carburants liquides plus traditionnels (pétrole, kérosène). Ils permettent d'obtenir des puissances embarquées élevées par rapport à la masse du moteur (en contrepartie d'une consommation élevée).
Électronique
- Les récepteurs, montés dans les hélicoptères, sont les pendants des télécommandes, et distribuent, selon les ondes reçues, des ordres aux servomoteurs.
- Les servomoteurs, souvent appelés « servos », sont des moteurs entraînant des gouvernes à l'aide de tringles et de câbles. Leurs taille, poids et puissance peuvent beaucoup varier selon leur fonction et la taille du modèle.
- Les accumulateurs servent à alimenter toute l'électronique d'un hélicoptère, voire le moteur.
- Divers circuits sont construits et utilisés, au gré des besoins. Ils peuvent servir pour l'illumination des modèles volants, le lancement de parachutes, des bruitages...

Système de réception Graupner avec un servomoteur, une batterie Ni-MH et un récepteur
Contrôle radio
Radiocommandes
Les petits hélicoptères à pas fixe ne nécessitent qu'une radio à quatre canaux (gaz, ailerons, gouvernes, volets) alors que pour les modèles à pas collectif il est nécessaire d'avoir au moins 5 canaux, 6 étant le plus courant. À cause de l'interaction entre les diverses commandes, les radios les plus sophistiquées comprennent des réglages de fonctions mixtes comme gaz/collectif et gaz/gouverne.
Certaines sont très sophistiquées, permettant la double commande, ou possédant des fonctions telles que le contrôle du temps de vol restant avant que le réservoir ou la batterie ne soit vide, ou détectant tout comportement suspect du matériel, et permettent à l'utilisateur de faire atterrir son hélicoptère avant la panne pour éviter des dégâts sur l'appareil.
Les marques principales sont Spektrum, Futaba, JR, Hitec, Airtronics, Sanwa, Multiplex.
Les prix des radios varient de deux cents à plusieurs milliers d'euros.
Modulation
Les radios émettent un signal en FM selon deux types de modulation. Le mode PPM, meilleur marché que le mode PCM, est généralement utilisé sur les hélicoptères RC d'entrée de gamme. La moindre fiabilité du mode PPM le rend plus adapté aux petits modèles qui sont moins dangereux que des appareils plus lourds. Les radios haut de gamme offrent les deux modes (PCM et PPM) afin d'offrir une compatibilité avec la majorité des récepteurs.
PPM
Le Pulse Position Modulation est une modulation de type FSK dans laquelle la position de chacun des servomoteurs est codée par une impulsion de largeur variable. Chaque trame, d'une longueur fixe, débute par une impulsion de synchronisation. L'avantage de cette transmission est la simplicité de l'électronique nécessaire, ce qui a fait son succès aux débuts du radiomodélisme. Son inconvénient principal est l'absence de détection d'erreur.
PCM
Le Pulse Code Modulation est un mode de modulation en fréquence de type FSK dans lequel la commande de chaque servomoteur est transmise sous forme d'un nombre codé. Les fabricants ont chacun leur propre système de codage de ce nombre sur une série variable de bits. JR utilise le mode Z-PCM (10 bits, 512 valeurs) et le S-PCM (11 bits, 1 024 valeurs). Futaba utilise le PCM-1024 et le G3 PCM (12 bits, 2 048 valeurs). L'avantage du codage PCM est de détecter les erreurs de transmission, ce qui permet de mettre les servomoteurs dans une position prédéfinie ou de les maintenir dans la dernière position correcte après la perte du signal : ce mode se nomme Fail Safe, et s'avère intéressant en termes de sécurité, notamment dans les hélicoptères (coupure des gaz en cas de perte de contrôle de l'appareil).
Pratiques de l'hélicoptère radiocommandé
Compétitions
 T-REX 450SE (Align) électrique
T-REX 450SE (Align) électriqueLes compétitions de vol acrobatique pour les hélicoptères suivent historiquement les règles de la Fédération aéronautique internationale, qui pour les hélicoptères portent l'appellation F3C. Celles-ci comprennent les figures de vol et d'acrobatie.
Une forme avancée de pilotage d'hélicoptères RC est appelée 3D. Lors d'un vol 3D, les hélicoptères accomplissent des figures acrobatiques avancées, parfois en freestyle ou une suite de figures prédéterminées par les organisateurs de la compétition. Il y a de nombreuses compétitions 3D dans le monde, les deux plus fameuses sont le 3D Masters au Royaume-Uni et l'eXtreme Flight Championship (XFC) aux États-Unis.
Loisirs
Les hélicoptères RC sont en général pilotés par des passionnés sous forme d'un loisir. Le pilotage des hélicoptères radiocommandés est une des disciplines les plus ardues du modélisme. Pour pouvoir acquérir la maîtrise totale d'un tel appareil, il est nécessaire de s'entraîner régulièrement. Il faut répéter les mêmes gestes à chaque séance pour acquérir les bons réflexes et bien sûr toujours garder son sang-froid. En parallèle une excellente connaissance de la mécanique de son hélicoptère permettra au pilote d'optimiser les réglages et ainsi d'avoir un vol plus stable et sûr surtout après un crash, chose quasi inévitable dans le parcours de cet apprentissage.
Il peut être intéressant de pratiquer ce loisir au sein d'un club où l'on pourra bénéficier de conseils sur l'investissement en matériel (hélicoptère, radiocommande, batterie, carburant, chargeur, ...), partager sa passion de l'hélicoptère avec d'autres passionnés et surtout, de pouvoir s'entraîner en toute sécurité (notamment grâce à l'assurance associée à l'inscription au club et à la fédération nationale, FFAM par exemple). Il ne faut en effet pas oublier que les pales d'un hélico RC à pas variable peuvent atteindre 400 km/h, ce qui constitue un véritable danger si toutes les pracautions ne sont pas prises
Applications commerciales et militaires
Les hélicoptères radiocommandés sont parfois utilisés pour des prises de vues aériennes (Flying Cam), l'observation et la surveillance. Certaines sociétés conçoivent des hélicoptères RC pour ces applications spécifiques.
Des recherches existent également concernant les drones, elles peuvent être accessibles aux étudiants et aux particuliers par des concours, tels que l'IARC[7] ou le Challenge minidrones de l'ONERA[8]. On peut ainsi voir des projets d'hélicoptères autonomes tels que le projet MARVIN[9], ou le DSAAV (MIT)[10].
Données économiques
Le prix des hélicoptères RC peut aller d'une vingtaine à plusieurs milliers d'euros. L'investissement initial et la maintenance ont généralement un coût plus élevé que les machines à voilure fixe. Cela peut s'expliquer par la présence de nombreuses pièces usinées, de pièces tournantes soumises à une usure importante (transmission mécanique, engrenages, plateau cyclique), de l'électronique plus élaborée (mixage des voies, gyroscope). Les hélicoptères chinois sont très peu cher mais ont une qualité souvent perfectible. De nombreux modèles RTF (ready to Fly, c'est à dire prêts à voler dès leur sortie de boîte) existent sur le marché et permettent pour un débutant patient et prudent de goûter aux joies du pilotage. En outre, en cas de crash et de casse, les pièces souvent en plastique bon marché peuvent se changer. Les principaux problèmes de ces hélicoptères sont des problèmes de conception , de matériaux (plastique bon marché) et d'une basse qualité électronique (tendant à s'améliorer ces dernières années). Il peut donc être très intéressant d'améliorer sa voilure tournante avec des pièces métalliques de bonne facture, d'utiliser une électronique de meilleure qualité (récepteur, radio, servos)...
[11].
Voir aussi
Bibliographie
- Jean Courvoisier, Hélicoptère : manuel du pilote, Paris, Chiron Éd., 1999 (OCLC 41090507)
- Roger Raletz, Théorie élémentaire de l'hélicoptère, Toulouse, CEPAD, 1995 (OCLC 36979055)
- Daniel Gasser, Étude expérimentale et théorique des phénomènes aérodynamiques de l'interaction rotor-fuselage sur l'hélicoptère en vol d'avancement, Chatillon, Office national d'études et de recherches aérospatiales, 1995 (OCLC 34308957)
- Roger Raletz, Basic theory of the helicopter, Toulouse, Cepadues Éditions, 1990 (OCLC 25278713)
- P. Lefort, M. Moullard, Pilotage de l'hélicoptère, Paris, Chiron, 1988 (OCLC 61776964)
- Pierre Lefort, Jacques Hamann, L'hélicoptère : théorie et pratique, Paris, Chiron, 1975 (OCLC 6419119)
- J. Heurtaux, L'Hélicoptère : mécanique du vol appliquée, Ézy-sur-Eure, Aero shopping France, DL 1976 (OCLC 35914270)
- Hector Goffard, J. D. Goffard, J Hoffelt, L'hélicoptère, cet inconnu ou Philosophie de la giraviation, Bruxelles, Giravia, diffusion SODEDI, 1973 (OCLC 3204662)
Articles connexes
Modèles et marques
- Dragonfly, une série d'hélicoptères radiocommandés électriques
- Dragonfly 53, l'un des modèles de la série Dragonfly
- Picoo Z, un modèle d'hélicoptère radiocommandé miniature en polystyrène et plastique
- Micro 47G
- Walkera (marque chinoise)
- Syma Double Horse,série d'hélicoptères électriques d'origine chinoise (exemple: n° 9081=Lama et n°9088=Apache AH64)
- Le Belt CP V1&V2, un modèle d'hélicoptère radiocommandé à pas variable de la société ESKY
Notes et références
(en) Cet article est partiellement ou en totalité issu d’une traduction de l’article en anglais intitulé « Radio-controlled helicopter ».
- ↑ Les débuts de l'hélicoptère radiocommandé
- ↑ L'hélicoptère radiocommandé en dates
- ↑ Hélicoptère : manuel du pilote ; Jean Courvoisier ; Paris : Chiron Éd., 1999. (OCLC 41090507)
- ↑ (en)Site Internet de la marque O.S.
- ↑ (en) Alerte de l'agence américaine de sûreté des produits de consommation, 18 décembre 2006
- ↑ Guinness World Records 2006 ; Guinness (Firm) ; New York: Bantam Books, 2006. (OCLC 68126167)
- ↑ Site officiel de l'IARC
- ↑ Challenge minidrones de l'ONERA
- ↑ le projet MARVIN
- ↑ MIT - projet DSAAV
- ↑ Hélicoptères radio commandés
 Portail de l’aéromodélisme
Portail de l’aéromodélisme Portail de l’aéronautique
Portail de l’aéronautique

La version du 14 juin 2007 de cet article a été reconnue comme « bon article », c'est-à-dire qu'elle répond à des critères de qualité concernant le style, la clarté, la pertinence, la citation des sources et l'illustration. Catégories : Bon article | Hélicoptère radiocommandé










Wikimedia Foundation. 2010.